1.本发明涉及一种防御系统,具体涉及一种连铸平台大包机器人围挡安全防御系统,属于连铸工艺技术领域。
背景技术:
2.炼钢厂连铸平台机器人主要完成安装、拆卸水口、测温、取样、定氢等功能,安装机器人的平台设有围挡,东西两侧各有一个出入门,门上设有一个功能复杂的门锁(门锁设有“打开请求”、“关门确认”、“紧急停止”三个按键及“允许打开”“门锁关好”“报警”等指示灯并通过信号线与机器人系统连接,交换各种数据并产生连锁。)只有在两个门被关闭的情况下,机器人才可以自动完成各项作业。因此,机器人的门锁系统正常异常重要。由于操作人员要在机器人操作间隙完成其他作业,因此门锁的动作频率极高,每天都要开关门锁多达30余次,现场工况也是温度高、粉尘大,因此,锁的故障率居高不下,内部零部件容易损坏,难以修复,而新锁成本有很高,造成门锁费用消耗大。因此,迫切的需要一种新的方案解决上述技术问题。
技术实现要素:
3.本发明正是针对现有技术中存在的问题,提供一种连铸平台大包机器人围挡安全防御系统,该技术方案能够实现两步开门,并有信号检测反馈,一旦发现人员在不恰当的时机开锁,及时发出报警,起到警示阻止的作用,门被打开的情况下,还可以停止机器人的动作,避免出现机器人伤人的事故;避免机器人在动作过程中紧急停止,机器人在动作过程中紧急停止对机器人损害大,如果停止位置不当还会对生产节奏造成影响,同时降低门锁消耗的成本。
4.为了实现上述目的,本发明的技术方案如下,一种连铸平台大包机器人围挡安全防御系统,所述防御系统包括固定围挡、活动门、门锁、显示面板、按键操作面板及信号检测和逻辑程序处理,其中固定围挡环绕在机器人动作区域周围,保证外部人员无法进入机器人动作区域,固定围挡上设有活动门,活动门上设有门锁、显示面板、按键操作面板及信号检测系统。机器人在动作时,必须保证门锁关闭,机器人动作时,如发现外部人员试图开锁(开锁第一步操作)发出声光预警,当发现门锁被打开,则立即中断机器人作业。
5.作为本发明的一种改进,所述门锁上有信号检测接近开关,显示面板、按键操作面板设有
[0006]“安全确认”“紧急停止”两个按钮、“允许开门”“禁止开门”两个指示灯以及“报警扬声器”,同时通过信号电缆与机器人本体的plc控制系统进行信号通讯,机器人系统中有各种信号的连锁。
[0007]
一种连铸平台大包机器人围挡安全防御系统的防御方法,所述方法包括以下步骤:
[0008]
步骤1:设计一种新型的专用门锁,该门锁安装在围挡活动门上,该门锁具有两步
开锁的特点,两步操作无法同时执行,必须在第1步打开后,才能打开第2步;
[0009]
步骤2:在门锁合适位置安装金属接近开关,能够检测到门锁第1步是否被打开、门锁第2步是否被打开,并引出信号线;
[0010]
步骤3:设计指示灯面板,含有两个信号指示灯,一个是“允许开门;”指示灯,绿色,外部干接点信号触发;一个是“禁止开门”指示灯,红色,外部干接点信号触发;一个扬声器,扬声器内部存储有事先录制好的音频信号“禁止开门,机器人正在动作,危险!”通过外部干接点信号触发,触发信号在时,音频信号循环播放,声音不小于80分贝;
[0011]
步骤4:设计按键操作板,含有2个按键,一个绿色点动按钮(“安全确认”),一个红色蘑菇头按钮(急停);
[0012]
步骤5:接线处理:
[0013]
a.所有接近开关、按钮接入机器人plc控制系统。
[0014]
b.机器人输出“允许开门”、“禁止开门”“扬声器控制”的干接点信号。
[0015]
c.机器人系统给门锁系统提供24vdc电源。
[0016]
步骤6:程序中的信号处理与连锁,
[0017]
a.检测门锁第1步的接近开关检测到第1步被打开时,延时2s,且机器人不在原位时,扬声器被激活发声,提示操作人员不能打开门锁。在这种情况下,如果操作工继续打开门锁第2步,系统检测到门锁第2步被打开,如果机器人正在动作,会立即停止。
[0018]
b.当机器人在原位时,只有门锁的两个接近开关检测到第1步、第2步都关闭时,方可以接受自动命令控制。
[0019]
c.当机器人在原位时,“允许开门”指示灯亮,“禁止开门”指示灯灭,当机器人在自动作业时,“允许开门”指示灯灭,“禁止开门”指示灯亮。
[0020]
d.当出现异常情况时,按“紧急停止”按钮可以使机器人动作立即停止,当机器人作业时,门锁两步均被打开时,结果同“紧急停止”被按下一样,当门锁被关闭后,按下“安全确认”后,机器人方可继续作业。
[0021]
相对于现有技术,本发明具有如下优点,该技术方案在操作人员误操作开门时,能够及时发出声光报警提醒操作人员,提醒和阻止操作人员的误操作行为,避免误操作,保证机器人的运行,避免中断机器人作业,避免生产事故的发生。
附图说明
[0022]
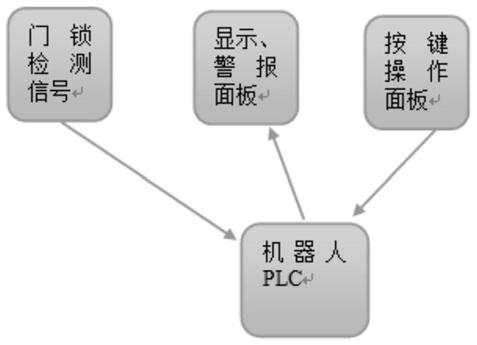
图1为本发明控制流程示意图;
[0023]
图2为面板显示示意图;
[0024]
图3为锁关闭状态示意图;
[0025]
图4为锁打开状态示意图;
[0026]
图中:1、指示灯面板,2、按键操作面板,3、第二步锁舌,4、锁体a,5、锁舌销轴,6、接近开关,7、接近开关,8、锁体b,9、第一步锁盖,10、磁铁,11、安全确认按钮,12、紧急停止蘑菇头按钮,13、允许开门指示灯,14、禁止开门指示灯,15、扬声器。
具体实施方式:
[0027]
为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
[0028]
实施例1:参见图1-图4,一种连铸平台大包机器人围挡安全防御系统,所述防御系统包括固定围挡、活动门、门锁、显示面板、按键操作面板及信号检测和逻辑程序处理,其中固定围挡环绕在机器人动作区域周围,保证外部人员无法进入机器人动作区域,固定围挡上设有活动门,活动门上设有门锁、显示面板、按键操作面板及信号检测系统。机器人在动作时,必须保证门锁关闭,机器人动作时,如发现外部人员试图开锁(开锁第一步操作)发出声光预警,当发现门锁被打开,则立即中断机器人作业,所述门锁上有信号检测接近开关,显示面板、按键操作面板设有“安全确认”“紧急停止”两个按钮、“允许开门”“禁止开门”两个指示灯以及“报警扬声器”,同时通过信号电缆与机器人本体的plc控制系统进行信号通讯,机器人系统中有各种信号的连锁,该系统突出特点具有两步开锁的特点,两步操作无法同时执行,必须在第1步打开后,才能打开第2步。第2步打开后,门才能打开。第一步操作及第二步操作都有相应的信号检测。使得机器人系统在不允许开门的情况,发现门有打开迹象时,提前发出预警,提醒操作人员勿进入机器人区域,这样既能提醒开门人员又能保证机器人的持续运行,避免出现机器人动作过程中紧急停车,减少对机器人的损害,如果停位不当,还可能对生产造成影响。
[0029]
实施例2:参见图1-图4,一种连铸平台大包机器人围挡安全防御系统的防御方法,所述方法包括以下步骤:
[0030]
步骤1:设计一种新型的专用门锁,该门锁安装在围挡活动门上,该门锁具有两步开锁的特点,两步操作无法同时执行,必须在第1步打开后,才能打开第2步;
[0031]
步骤2:在门锁合适位置安装金属接近开关,能够检测到门锁第1步是否被打开、门锁第2步是否被打开,并引出信号线;
[0032]
步骤3:设计指示灯面板,含有两个信号指示灯,一个是“允许开门;”指示灯,绿色,外部干接点信号触发;一个是“禁止开门”指示灯,红色,外部干接点信号触发;一个扬声器,扬声器内部存储有事先录制好的音频信号“禁止开门,机器人正在动作,危险!”通过外部干接点信号触发,触发信号在时,音频信号循环播放,声音不小于80分贝;
[0033]
步骤4:设计按键操作板,含有2个按键,一个绿色点动按钮(“安全确认”),一个红色蘑菇头按钮(急停);
[0034]
步骤5:接线处理:
[0035]
a.所有接近开关、按钮接入机器人plc控制系统。
[0036]
b.机器人输出“允许开门”、“禁止开门”“扬声器控制”的干接点信号。
[0037]
c.机器人系统给门锁系统提供24vdc电源。
[0038]
步骤6:程序中的信号处理与连锁,
[0039]
a.检测门锁第1步的接近开关检测到第1步被打开时,延时2s,且机器人不在原位时,扬声器被激活发声,提示操作人员不能打开门锁。在这种情况下,如果操作工继续打开门锁第2步,系统检测到门锁第2步被打开,如果机器人正在动作,会立即停止。
[0040]
b.当机器人在原位时,只有门锁的两个接近开关检测到第1步、第2步都关闭时,方可以接受自动命令控制。
[0041]
c.当机器人在原位时,“允许开门”指示灯亮,“禁止开门”指示灯灭,当机器人在自动作业时,“允许开门”指示灯灭,“禁止开门”指示灯亮。
[0042]
d.当出现异常情况时,按“紧急停止”按钮可以使机器人动作立即停止,当机器人
作业时,门锁两步均被打开时,结果同“紧急停止”被按下一样,当门锁被关闭后,按下“安全确认”后,机器人方可继续作业。
[0043]
工作原理:
[0044]
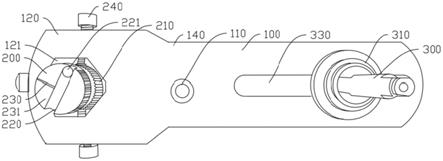
专用门锁的锁体分为两部分,锁体b 8和锁体a 4分别安装在围栏的固定部分和活动门上,当门关闭时,第二步锁舌3能够放入锁体b 8的凹槽中,第一步锁盖9盖在锁体b 8的上面,磁铁10与锁体b 8通过磁力牢固结合。当第二步锁舌3放入锁体b 8的凹槽中,接近开关6的信号置“1”,当第一步锁盖9盖在锁体b 8的上面时,接近开关7的信号置“1”。当门打开时,必须先打开第一步锁盖9,此时接近开关7的信号置“0”,才能打开第二步锁舌3,此时接近开关6的信号置“0”。
[0045]
指示灯面板1和按键操作面板2在安装时,尽可能靠近锁体a 4,方便操作人员操作按键和观察各种信息。
[0046]
门锁打开状态如图4下:
[0047]
正常关闭步骤如下:
[0048]
1、将第二步锁舌3放下,放入锁体b8中间的槽中,传感器6的信号为“1”[0049]
2、将第一步锁盖9、磁铁10部分合上,盖在锁体b 8的上方,传感器7的信号为“1”门锁关闭状态如下:
[0050]
正常打开步骤如下:
[0051]
1、将第一步锁盖9、磁铁10部分打开,传感器7的信号为“0”[0052]
2、将第二步锁舌3抬起,传感器6的信号为“0”[0053]
由图可知,开锁时,只有第一步操作完毕,才能操作第二步,当操作人员误开门时,第一步操作完毕时,传感器6的信号由“1”变为“0”,系统在检测到这一变化时,就会发出声光报警,达到阻止操作人员继续操作的目的,同时又能保证不中断机器人的作业。
[0054]
如果操作人员继续完成第一步操作,则作业中的机器人立即停止作业,保持当前位置不变。需要说明的是上述实施例,并非用来限定本发明的保护范围,在上述技术方案的基础上所作出的等同变换或替代均落入本发明权利要求所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。