1.本实用新型涉及机器人领域,特别是涉及一种机器人的抓取装置。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,然而现有的机器人的抓取装置在抓取较大的物件时,常常因为抓取装置不能灵活的调节夹具的夹角,从而导致抓取装置不能抓取较大的物件,因此需要工人更换不同型号的抓取装置,从而使得工人需要较长的操作时间进行更换抓取装置,从而导致抓取工作的效率较低。
技术实现要素:
3.为了克服现有技术的不足,本实用新型提供一种机器人的抓取装置,能够在增加抓取装置的夹具的夹角,避免了抓取装置不能抓取较大的物件发生,从而提高了抓取工作的效率。
4.为解决上述技术问题,本实用新型提供如下技术方案:一种机器人的抓取装置,包括底座,所述底座的上端固定设置有支撑杆,所述支撑杆的内侧设置有活动杆,所述活动杆的内部固定设置有第一转动轴,所述第一转动轴延伸至支撑杆的内部,所述第一转动轴与支撑杆活动连接,所述活动杆的数量有两组,另一组所述活动杆的内侧活动设置有连接杆,所述连接杆的内部固定设置有第二转动轴,所述第二转动轴延伸至另一组活动杆的内部,所述第二转动轴与另一组活动杆活动连接,所述连接杆的下端设置有控制结构,所述控制结构包括固定设置在连接杆下端的设备箱,所述设备箱的下端固定设置有控制箱,所述设备箱的内侧顶部设置有动力部,所述控制箱的内侧设置有调节部。
5.优选的,所述动力部包括固定设置在设备箱内侧顶部的电机,所述电机的下端活动设置有螺纹轴,所述螺纹轴的外侧螺纹设置有移动架,所述移动架的内侧活动设置有移动杆。
6.优选的,所述移动杆的内部固定设置有一号转轴,所述一号转轴延伸至移动架的内部,所述一号转轴与移动架活动连接,所述移动杆的内部靠近一号转轴的下侧固定设置有二号转轴。
7.优选的,所述调节部包括活动设置在控制箱内侧的调节架,所述调节架的内侧与移动杆的外侧靠近移动架的下侧通过二号转轴活动连接,所述调节架的内部固定设置有三号转轴,所述三号转轴延伸至控制箱的内部,所述三号转轴与控制箱活动连接。
8.优选的,所述三号转轴的下端固定设置有连接架,所述连接架的内侧活动设置有夹具,所述夹具的内部固定设置有四号转轴,所述四号转轴延伸至连接架的内部,所述四号转轴与连接架活动连接。
9.优选的,所述夹具的外侧靠近连接架的前侧活动设置有控制架,所述夹具的内部靠近四号转轴的前侧固定设置有五号转轴,所述五号转轴延伸至控制架的内部,所述五号转轴与控制架活动连接,所述控制架的内侧靠近夹具的上侧活动设置有固定块。
10.优选的,所述固定块的上端与控制箱的下端固定连接,所述固定块的内部固定设置有六号转轴,所述六号转轴延伸至控制架的内部靠近五号转轴的上侧,所述六号转轴与控制架活动连接。
11.优选的,所述底座的下端固定设置有万向轮,所述万向轮的数量有四组。
12.与现有技术相比,本实用新型能达到的有益效果是:
13.1、本实用新型中,首先启动电机,使得电机带动螺纹轴旋转,由于螺纹轴与移动架之间为螺纹连接,所以螺纹轴的旋转使得移动架沿着螺纹轴移动,从而使得移动架通过一号转轴带动移动杆移动,通过螺纹轴的旋转带动了移动架的移动,可以达到便于操作的目的;
14.2、本实用新型中,由于移动杆的移动,使得移动杆通过二号转轴带动调节架以三号转轴为轴旋转,从而使得调节架带动连接架旋转,同时连接架通过四号转轴带动夹具旋转,由于固定块与控制箱固定连接、控制架通过六号转轴与固定块活动连接,使得夹具通过五号转轴以六号转轴为轴向上旋转,使得夹具向斜上方移动,同时使得两组夹具夹紧较大的物件,通过调节架以三号转轴为轴旋转使得夹具以六号转轴为轴向上旋转,可以达到抓取较大物件的目的,提高了抓取工作的效率,避免了抓取装置不能抓取较大的物件发生。
附图说明
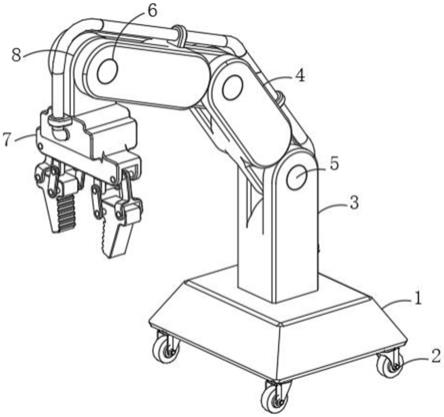
15.图1为本实用新型整体示意图;
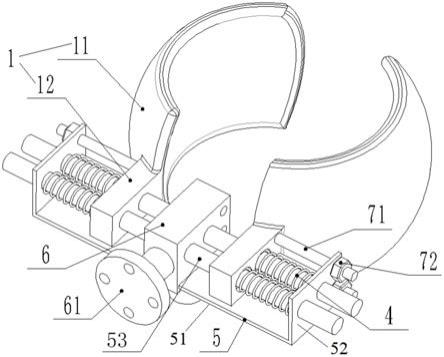
16.图2为本实用新型控制结构的示意图;
17.图3为本实用新型控制结构的内部示意图;
18.图4为本实用新型控制结构的动力部示意图;
19.图5为本实用新型控制结构的调节部示意图。
20.其中:1、底座;2、万向轮;3、支撑杆;4、活动杆;5、第一转动轴;6、第二转动轴;7、控制结构;71、设备箱;72、控制箱;73、动力部;731、电机;732、螺纹轴;733、移动架;734、移动杆;735、一号转轴;736、二号转轴;74、调节部;741、调节架;742、三号转轴;743、连接架;744、夹具;745、四号转轴;746、控制架;747、五号转轴;748、六号转轴;749、固定块;8、连接杆。
具体实施方式
21.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本实用新型的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
22.实施例:
23.如图1-5所示,本实用新型提供一种机器人的抓取装置,包括底座1,底座1的上端固定设置有支撑杆3,支撑杆3的内侧设置有活动杆4,活动杆4的内部固定设置有第一转动轴5,第一转动轴5延伸至支撑杆3的内部,第一转动轴5与支撑杆3活动连接,活动杆4的数量有两组,另一组活动杆4的内侧活动设置有连接杆8,连接杆8的内部固定设置有第二转动轴6,第二转动轴6延伸至另一组活动杆4的内部,第二转动轴6与另一组活动杆4活动连接,连接杆8的下端设置有控制结构7,控制结构7包括固定设置在连接杆8下端的设备箱71,设备箱71的下端固定设置有控制箱72,设备箱71的内侧顶部设置有动力部73,控制箱72的内侧设置有调节部74。
24.如图4所示,动力部73包括固定设置在设备箱71内侧顶部的电机731,电机731的下端活动设置有螺纹轴732,螺纹轴732的外侧螺纹设置有移动架733,移动架733的内侧活动设置有移动杆734,移动杆734的内部固定设置有一号转轴735,一号转轴735延伸至移动架733的内部,一号转轴735与移动架733活动连接,移动杆734的内部靠近一号转轴735的下侧固定设置有二号转轴736;
25.首先启动电机731,使得电机731带动螺纹轴732旋转,由于螺纹轴732与移动架733之间为螺纹连接,所以螺纹轴732的旋转使得移动架733沿着螺纹轴732移动,从而使得移动架733通过一号转轴735带动移动杆734移动,通过螺纹轴732的旋转带动了移动架733的移动,可以达到便于操作的目的。
26.如图5所示,调节部74包括活动设置在控制箱72内侧的调节架741,调节架741的内侧与移动杆734的外侧靠近移动架733的下侧通过二号转轴736活动连接,调节架741的内部固定设置有三号转轴742,三号转轴742延伸至控制箱72的内部,三号转轴742与控制箱72活动连接,三号转轴742的下端固定设置有连接架743,连接架743的内侧活动设置有夹具744,夹具744的内部固定设置有四号转轴745,四号转轴745延伸至连接架743的内部,四号转轴745与连接架743活动连接,夹具744的外侧靠近连接架743的前侧活动设置有控制架746,夹具744的内部靠近四号转轴745的前侧固定设置有五号转轴747,五号转轴747延伸至控制架746的内部,五号转轴747与控制架746活动连接,控制架746的内侧靠近夹具744的上侧活动设置有固定块749,固定块749的上端与控制箱72的下端固定连接,固定块749的内部固定设置有六号转轴748,六号转轴748延伸至控制架746的内部靠近五号转轴747的上侧,六号转轴748与控制架746活动连接;
27.由于移动杆734的移动,使得移动杆734通过二号转轴736带动调节架741以三号转轴742为轴旋转,从而使得调节架741带动连接架743旋转,同时连接架743通过四号转轴745带动夹具744旋转,由于固定块749与控制箱72固定连接、控制架746通过六号转轴748与固定块749活动连接,使得夹具744通过五号转轴747以六号转轴748为轴向上旋转,使得夹具744向斜上方移动,同时使得两组夹具744夹紧较大的物件,通过调节架741以三号转轴742为轴旋转使得夹具744以六号转轴748为轴向上旋转,可以达到抓取较大物件的目的,提高了抓取工作的效率,避免了抓取装置不能抓取较大的物件发生。
28.如图1所示,底座1的下端固定设置有万向轮2,万向轮2的数量有四组;
29.通过四组万向轮2的作用,可以达到便于移动的目的。
30.工作时,使用者首先启动电机731,使得电机731带动螺纹轴732旋转,由于螺纹轴732与移动架733之间为螺纹连接,所以螺纹轴732的旋转使得移动架733沿着螺纹轴732移
动,从而使得移动架733通过一号转轴735带动移动杆734移动,通过螺纹轴732的旋转带动了移动架733的移动,可以达到便于操作的目的,由于移动杆734的移动,使得移动杆734通过二号转轴736带动调节架741以三号转轴742为轴旋转,从而使得调节架741带动连接架743旋转,同时连接架743通过四号转轴745带动夹具744旋转,由于固定块749与控制箱72固定连接、控制架746通过六号转轴748与固定块749活动连接,使得夹具744通过五号转轴747以六号转轴748为轴向上旋转,使得夹具744向斜上方移动,同时使得两组夹具744夹紧较大的物件,通过调节架741以三号转轴742为轴旋转使得夹具744以六号转轴748为轴向上旋转,可以达到抓取较大物件的目的,提高了抓取工作的效率,避免了抓取装置不能抓取较大的物件发生。
31.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
32.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。