1.本实用新型涉及柔性封装领域,特别是涉及一种柔性封装结构。
背景技术:
2.传统的封装结构通常采用梯形焊线或多边形焊线进行焊接,如图1及图2所示。然而,在柔性封装结构的使用过程中发现,柔性基板弯曲时封装层形变挤压使焊线发生形变,梯形焊线或多边形焊线中焊点的球颈部容易断裂,导致焊线失效,柔性封装结构的可弯折性能较差。
技术实现要素:
3.有鉴于此,有必要提供一种柔性封装结构。
4.本实用新型提供一种柔性封装结构,包括基板、芯片及焊线,所述芯片固设于所述基板,所述焊线的一端焊接于所述芯片,另一端焊接于所述基板或另一个所述芯片,所述焊线呈m形。
5.在本实用新型的一个实施例中,所述焊线包括依次设置的第一焊点、第一拐点、第二拐点、第三拐点及第二焊点,将所述基板固定有所述芯片的平面作为水平基准面;所述第一焊点与所述第一拐点的连线相对于所述水平基准面之间的夹角为80
°
至90
°
。
6.在本实用新型的一个实施例中,所述第一焊点与所述第一拐点的连线垂直于所述水平基准面;及/或,所述第一焊点与所述第一拐点的连线的长度180μm至230μm。
7.在本实用新型的一个实施例中,所述焊线包括依次设置的第一焊点、第一拐点、第二拐点、第三拐点及第二焊点;所述第一拐点与第二拐点的连线,相对于所述第二拐点与所述第三拐点的连线之间的夹角为140
°
至170
°
。
8.在本实用新型的一个实施例中,所述焊线包括依次设置的第一焊点、第一拐点、第二拐点、第三拐点及第二焊点;所述第二拐点与第三拐点的连线,相对于所述第三拐点与所述第二焊点的连线之间的夹角为95
°
至110
°
。
9.在本实用新型的一个实施例中,所述焊线包括依次设置的第一焊点、第一拐点、第二拐点、第三拐点及第二焊点,将所述基板固定有所述芯片的平面作为水平基准面;所述第一拐点与所述第二拐点的连线投影至所述水平基准面上的长度,占所述第一焊点与所述第二焊点的连线投影至所述水平基准面上长度的30%至40%。
10.在本实用新型的一个实施例中,所述第三拐点与所述第二焊点的连线投影至所述水平基准面上的长度,占所述第一焊点与所述第二焊点的连线投影至所述水平基准面上长度的30%至40%。
11.在本实用新型的一个实施例中,所述柔性封装结构还包括硅胶封层,所述硅胶封层固设于所述基板,所述芯片及所述焊线包覆在所述硅胶封层内。
12.在本实用新型的一个实施例中,所述焊线为多根,多根所述焊线之间串联连接。
13.在本实用新型的一个实施例中,所述焊线为多根,多根所述焊线之间并排设置。
14.在本实用新型的一个实施例中,所述焊线两个焊点之间的距离为0.5mm至1.5mm。
15.本实用新型提供的柔性封装结构中,采用m形焊线,在柔性封装结构弯折时,m形焊线相对于梯形焊线或多边形焊线,其焊点在球颈部的受到的应力较小,在柔性封装结构使用的过程中,球颈部不易断裂,从而提升了柔性封装结构的可弯折性能。
附图说明
16.图1为现有梯形焊线柔性封装结构的结构示意图;
17.图2为现有多边形焊线柔性封装结构的结构示意图;
18.图3为现有梯形焊线柔性封装结构的应力仿真图;
19.图4为现有多边形柔性封装结构的应力仿真图;
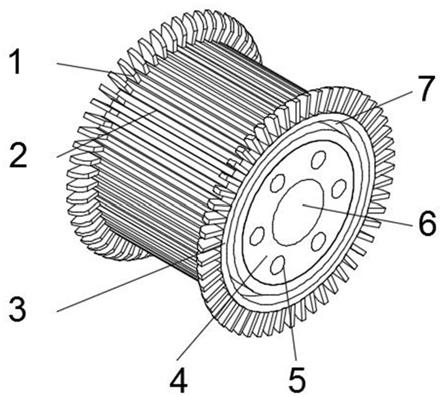
20.图5为本实用新型一个实施例中m形焊线柔性封装结构的结构示意图;
21.图6为图5中柔性封装结构的部分结构示意图;
22.图7为m形焊线柔性封装结构的应力仿真图;
23.100、柔性封装结构;10、基板;20、芯片;21、晶片黏结薄膜;30、焊线;40、硅胶封层;s1、第一焊点;s2、第二焊点;k1、第一拐点;k2、第二拐点;k3、第三拐点。
具体实施方式
24.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
25.需要说明的是,当组件被称为“连接于”另一个组件,它可以直接连接于另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
27.本实用新型提供一种柔性封装结构100,其用于柔性电子领域。柔性封装结构100包括基板10、芯片20及焊线30,基板10用于承载芯片20,芯片20固设于基板10,焊线30的一端焊接于芯片20,另一端焊接于基板10或另一个芯片20,用于实现电连通。
28.具体的,基板10为柔性电路板(fpc),厚度约为170μm;芯片20粘贴于基板10,焊线30优选为金线,金线的直径约为17.5μm。进一步的,芯片20通过晶片黏结薄膜(daf膜)21粘合于基板10,芯片20与daf膜的总厚度在35μm左右。
29.焊接时,通常先将焊线30烧结成球状,与芯片20焊接并形成第一焊点;焊头沿预设轨迹运动并形成不同形状的焊线30,最终将焊线30的另一端焊接于基板10或另一个芯片20上,并形成第二焊点。从形状上来说,第一焊点通常为球状,第二焊点大致呈鱼尾状。
30.传统的封装结构通常采用梯形焊线(如图1所示)或多边形焊线(如图2所示)进行
焊接。在柔性封装结构的使用过程中发现,梯形焊线或多边形焊线中焊点的球颈部(即焊线中靠近球状焊点一端的颈缩结构)受到的应力较大,使用过程中容易断裂,导致焊线失效,柔性封装结构的可弯折性能较差。
31.在柔性封装结构的弯折半径为8mm的条件下,对梯形焊线柔性封装结构和多边形焊线柔性封装结构作应力仿真图,结果分别如图3和图4所示。由图3可知,梯形焊线在第一焊点球颈部受到的应力值最大,且最大应力值为664.6mpa;由图4可知,多边形焊线也在第一焊点球颈部受到的应力值最大,且最大应力值为657.1mpa。通过应力仿真分析,梯形焊线和多边形焊线均在第一焊点球颈部处受到的应力值最大,因此该点位置最容易发生断裂失效,仿真结论与产品实际失效位置一致,应力仿真分析具有可靠性。
32.基于现有技术存在的问题,请一并参阅图5至图7,本实用新型中的焊线30呈m形。由图7可知,在柔性封装结构100的弯折半径为8mm的条件下,m形焊线30在第一焊点球颈部受到的应力值最大,且最大应力值仅为579.8mpa,远小于梯形焊线30和多边形焊线30的最大应力。因此,在柔性封装结构100弯折时,m形焊线30相对于梯形焊线30或多边形焊线30,其焊点在球颈部的受到的应力较小,在柔性封装结构100使用的过程中,球颈部不易断裂,从而提升了柔性封装结构100的可弯折性能。
33.为了便于后续的描述,将m形焊线30的三个弯折处按照弯折顺序依次记为第一拐点k1、第二拐点k2、第三拐点k3;将基板10固定有芯片20的平面记为水平基准面,将垂直于所述水平基准面的且经过所述第一焊点的直线作为垂直轴线。
34.在本实用新型的一个实施例中,第一焊点s1与第一拐点k1的连线s1k1(行业内常称之为弧高)相对于垂直轴线之间的最大夹角为10
°
,也即,以第一焊点s1为顶点、以垂直轴线为中轴线,形成一个顶点角度为20
°
的锥形区域,第一焊点s1与第一拐点k1的连线s1k1应当位于该锥形区域内。也即,第一焊点s1与第一拐点k1的连线s1k1相对于水平基准面之间的夹角为80
°
至90
°
。
35.作为优选,第一焊点s1与第一拐点k1的连线s1k1垂直于水平基准面,也即,第一焊点s1与第一拐点k1的连线s1k1与垂直轴线重合。
36.进一步的,第一焊点s1与第一拐点k1的连线s1k1的长度180μm至230μm。
37.在本实用新型的一个实施例中,如图6所示,第一拐点k1与第二拐点k2的连线k1k2,与第三拐点k3和第二拐点k2连线k3k2的延长线之间的偏离角度(图6所示的α角)为-10
°
至-40
°
,其中,负号(-)仅代表焊头在进行第二拐点k2的加工时,向靠近基板的方向运动,而非角度值为负数。由此可推出,第一拐点k1与第二拐点k2的连线k1k2,相对于第二拐点k2与第三拐点k3的连线k2k3之间的夹角为140
°
至170
°
。
38.作为优选,第一拐点k1与第二拐点k2的连线k1k2,与第三拐点k3和第二拐点k2连线k3k2的延长线之间的偏离角度(图6所示的α角)为-30
°
,也即,第一拐点k1与第二拐点k2的连线k1k2,相对于第二拐点k2与第三拐点k3的连线k2k3之间的夹角为150
°
。
39.在本实用新型的一个实施例中,如图6所示,将与第二拐点k2与第三拐点k3的连线k2k3相垂直(朝向基板10方向)的线段记为k3k3’,第二焊点s2与第三拐点k3的连线s2k3与线段k3k3’之间的偏转角度为 5
°
至 20
°
。其中,正号( )也仅代表焊头在进行第三拐点k3的加工时,向远离基板的方向运动,而非角度值为正数。由此可推出,第二拐点k2与第三拐点k3的连线k2k3,相对于第三拐点k3与第二焊点s2的连线k3s2之间的夹角为95
°
至110
°
。
40.作为优选,第二焊点s2与第三拐点k3的连线s2k3与线段k3k3’之间的偏转角度为 20
°
,也即,第二拐点k2与第三拐点k3的连线k2k3,相对于第三拐点k3与第二焊点s2的连线k3s2之间的夹角为110
°
。
41.在本实用新型的一个实施例中,第一焊点s1与第一拐点k1的连线投影至水平基准面上的长度(即图6中的m1线段),占第一焊点s1与第二焊点s2的连线投影至水平基准面上长度(即图6中的n线段)的30%至40%。
42.在本实用新型的一个实施例中,第三拐点k3与第二焊点s2的连线投影至水平基准面上的长度(即图6中的m2线段),占第一焊点s1与第二焊点s2的连线投影至水平基准面上长度(即图6中的n线段)的30%至40%。
43.本实用新型中m形焊线30在形状上区别于现有的焊线形状,三个拐点的参数是提高m形焊线30在生产时的稳定性的关键参数,下表汇总了m形焊线30成型的关键参数。
44.折角点反向高度反向长度折角角度长度比第一拐点k1180μm~230μm180μm~230μm\\第二拐点k2\\-10
°
~-40
°
30%~40%第三拐点k3\\ 5
°
~ 20
°
30%~40%
45.反向高度和反向长度是指在焊接设备在焊接焊线的过程中,为了使得焊头沿预设轨迹运动而设置的参数。其中,k1的反向高度和反向长度的比例,决定了第一焊点s1与第一拐点k1的连线s1k1与相对于垂直轴线之间的偏转角度。当反向高度大于反向长度时,第一焊点s1与第一拐点k1的连线s1k1向第二拐点k2方向偏离;反之则向背离第二拐点k2的方向偏离。上表中的k2的折角角度即图6中的α角,k3的折角角度即图6中的β角。k2的长度比即图6中m1线段与n线段的比例,k3的长度比即图6中m2线段与n线段的比例。
46.第一拐点k1的关键参数决定着焊线30弧高,第二拐点k2及第三拐点k3共同决定m形焊线30的形状及可生产性,当第二拐点k2或第三拐点k3折角角度超出范围,或者,第二拐点k2或第三拐点k3长度比超出范围时,均可能会造成无法m形焊线30生产不稳定问题,甚至m形焊线30无法成型,无法实现机械化生产。
47.此外,传统柔性封装结构中,焊线中两个焊点之间的距离通常在3mm至7mm,难以突破3mm的下限。然而,两个焊点之间的距离过大,在柔性封装结构弯折时,焊线的受力点较多,容易引起焊线断裂或焊接点脱落,导致焊线失效。
48.在本实用新型的一个实施例中,焊线30两个焊点之间的距离为0.5mm至1.5mm。如此设置,两个焊点之间的距离较小,在柔性封装结构100弯折时,焊线30的受力点较少,焊线30不易断裂,并且焊接点也不易受到较大的弯折力,从而提高了柔性封装结构100的可弯折性能。
49.需要特别说明的是,为了便于m形焊线30形状的说明,图5及图6中的m形焊线30形状更靠近理论模型,而实际m形焊线30在不同拐点处更加圆润,图7中的m形焊线30更靠近实际焊线30的形状。
50.请再次参阅图5,在其中一个实施例中,柔性封装结构100还包括硅胶封层40,硅胶封层40固设于基板10,芯片20及焊线30包覆在硅胶封层40内。作为优选,硅胶封层40中硅胶的硬度为邵氏20a,硅胶封层40的中心高度不超过1mm,进一步优选为400μm。由于硅胶硬度越大、硅胶封层40的中心高度越高弯折能力越差,本领域技术人员可根据需求选择不同硬
度的硅胶以及不同的硅胶封层40的中心高度。
51.为了测试本实用新型中m形焊线30的弯折性能,采用串联模型和并排模型进行测试。
52.串联模型是指,焊线30为多根,多根焊线30之间串联连接,例如第一根焊线30的两端分别焊接于基板10上的第一个焊盘和第二个焊盘,第二根焊线30的两端分别焊接于第二个焊盘和第三个焊盘,并以此类推。在串联模型中,若多根焊线30中一根焊线30失效,整个串联模型均失效。作为优选,焊线30至少为9根。
53.并排模型是指,焊线30为多根,多根焊线30之间并排设置,例如第一根焊线30的两端分别焊接于芯片20的第一芯片焊盘和基板10的第一个焊盘,第二根焊线30的两端分别焊接于同一个芯片20的第二芯片焊盘和同一基板10的第二个焊盘,并以此类推。在并列模型中,每根焊线30独立工作,当其中一根焊线30失效时,并列模型失效。作为优选,焊线30至少为9根。
54.为了对比m形焊线30与梯形焊线30、多边形焊线30的弯折性能,测试时均采用9根焊线30,且柔性封装结构100的弯折半径均为8mm。采用串联模型对三者进行测试,结果如下表所示。
55.分组123弧高200μm200μm200μm焊线30形状梯形多边形m形弯折成功次数1000~1500次1400~2000次16000~17000次
56.可见,梯形焊线30和多边形焊线30的弯折成功次数远远小于m形焊线30的弯折成功次数。
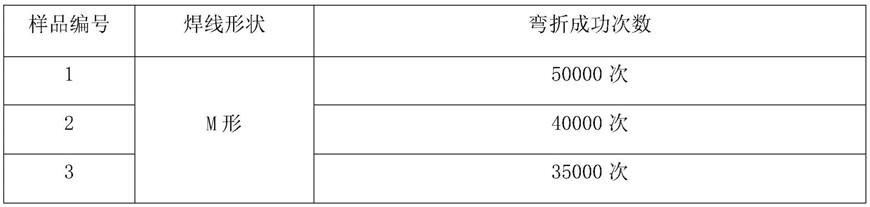
57.进一步的,对m形焊线30也采用了并列模型测试,测试时采用9根焊线30,且柔性封装结构100的弯折半径均为8mm。结果如下表所示。
[0058][0059]
可见,并列模型的弯折成功次数更高,为35000次至50000次。
[0060]
本实用新型提供的柔性封装结构100中,采用m形焊线30,在柔性封装结构100弯折时,m形焊线30相对于梯形焊线或多边形焊线,其焊点在球颈部的受到的应力较小,在柔性封装结构100使用的过程中,球颈部不易断裂,从而提升了柔性封装结构100的可弯折性能。
[0061]
以上实施方式的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施方式中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0062]
本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上实施方式所作的适当改变和变化都落在本实用新型要求保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。