1.本实用新型涉及到对地面的清洁领域,具体涉及到一种地面清洁设备。
背景技术:
2.现有的清洁机主要在地面上来对脏污进行处理,清洁机主要有来执行拖地功能的拖地机,还有执行洗地功能的洗地机,不论是拖地功能还是洗地功能均设置拖布来对地面进行清洁,在对地面的清洁处理过程中需要清洁机来对拖布提供清水,并将清洁地面过程中形成的吸附在拖布上的污水进行收集,现有清洁机虽然实现对地面的清洁处理,但是清洁机的功能单一导致无法较好的适应用户的使用需求,特别是在室内地面上存在局部部分较为脏污时一般用户希望通过手持清洁机来进行及时有针对性的清洁处理,在此情况下清洁机为自移动行走时则无法及时来识别到局部的脏污位置导致无法及时来进行清洁处理。
3.同时,因清洁机整体结构的限制导致供给清水的清水箱和收集污水的污水箱的容积有限,需要用于频繁地来对清水箱加清水和对污水箱倾倒处理,污水箱还需要进行清洗维护处理,导致用户使用不方便且体验效果差。
4.以及,现有的清洁机的结构对污水的收集效果较差,无法较好的来对污水进行集中引导收集,导致对地面的清洁效果较差,且容易存在对地面的二次污染问题,同时在对清洁机上的拖布进行清洗的过程中对拖布的清洗效果差,且无法较好的将拖布上的污水进行有效收集,整体对地面的清洁效果差。
技术实现要素:
5.本实用新型旨在至少在一定程度上解决上述相关技术中的技术问题之一。
6.为此,本实用新型的目的在于提供一种地面清洁设备,主要解决清洁机清洁模式单一无法较好的适应用户使用需求的问题,以及解决现有清洁机存在的收集污水效果差、存在二次污染地面的问题。
7.本实用新型的实施方式提供了一种地面清洁设备,包括清洁机,清洁机至少包括第一模块、第二模块和第三模块;清洁机包括控制模块,控制模块可分别与第一模块和第二模块电性相连;第一模块上设置有擦拖件,第二模块上设置有驱动轮;当第一模块和第二模块相连安装时控制模块可控制清洁机通过驱动轮来执行自移动清洁模式;当第三模块安装在位时设置第三模块可相对第一模块旋转且清洁机通过第三模块可执行手持清洁模式。
8.前述的一种地面清洁设备,清洁机上设置有第一检测模块,控制模块与第一检测模块电性相连,当第一检测模块检测到第二模块安装在位时则控制模块可控制清洁机执行自移动清洁模式。
9.前述的一种地面清洁设备,清洁机上设置有第二检测模块,控制模块与第二检测模块电性相连,当第二检测模块检测到第三模块安装在位时则控制模块可控制清洁机执行手持清洁模式。
10.前述的一种地面清洁设备,拖擦件设置为柱形结构且设置为可旋转滚动的结构,
设置在自移动清洁模式中拖擦件的旋转滚动速度为q,设置在手持清洁模式中拖擦件的旋转滚动速度为e,并设置q小于等于e。
11.前述的一种地面清洁设备,清洁机上还设置有集污区和供液区,至少供液区的一部分位于集污区的上部,供液区用于向拖擦件供给清水,集污区用于收集拖擦件上的污水。
12.前述的一种地面清洁设备,第一模块上设置有拖擦腔,拖擦腔位于拖擦件的外侧部且设置为与集污区相连通的结构,至少集污区的一部分位于拖擦件的外侧部位置来使得拖擦件上的污水在重力下进入到集污区内收集。
13.前述的一种地面清洁设备,第一模块上还设置有集污组件,集污组件位于拖擦件的外侧部位置上,集污组件至少包括集污通道,集污通道设置为分别与拖擦腔和集污区相连通的结构。
14.前述的一种地面清洁设备,至少集污通道的一部分位于拖擦件的顶部的下侧位置,且集污通道设置为朝向集污区方向呈由高至低逐渐倾斜延伸伸出的结构。
15.前述的一种地面清洁设备,拖擦件设置为可沿a方向旋转滚动的结构,至少集污区的一部分和集污组件的一部分位于沿a方向由拖擦件的顶部至拖擦件的底部的外侧区域位置上。
16.前述的一种地面清洁设备,集污组件还包括刮部,刮部设置为与拖擦件的外表面相互接触的结构,且刮部上还设置有引导部,引导部设置为朝向拖擦件的外侧的下侧方向延伸伸出的结构并设置引导部与集污通道相连。
17.前述的一种地面清洁设备,刮部上设置有凸部,凸部设置为朝向拖擦件的截面的中部区域或朝向拖擦件的截面的中心区域来构成与拖擦件的外表面相互接触的结构。
18.前述的一种地面清洁设备,凸部设置为位于沿a方向由拖擦件的顶部至拖擦件在水平方向上的靠近集污区的侧部的区域位置上来形成与拖擦件的外表面相互接触的结构。
19.前述的一种地面清洁设备,拖擦腔上还设置有入液部,供液区通过入液部与拖擦腔相连通来用于向拖擦件供给清水,入液部设置为位于凸部的上侧且位于拖擦件的外侧并设置为位于沿a方向由拖擦件在水平方向上的远离集污区的侧部位置至凸部的区域位置上来对拖擦件供给清水。
20.前述的一种地面清洁设备,集污组件还包括压部,压部设置为与拖擦件的外表面相互接触的结构,且压部位于沿a方向由拖擦件在水平方向上的远离集污区的侧部位置至入液部的区域位置上。
21.前述的一种地面清洁设备,至少集污区的侧部的一部分位于第一模块的后侧且当第二模块安装在第一模块上时使得第二模块的侧部对集污区的侧部形成包覆相接触的结构;或至少集污区的侧部的一部分位于第一模块的后侧且当第二模块未安装在位时使得集污区的侧部的一部分形成为第一模块的侧部的一部分的结构。
22.前述的一种地面清洁设备,供液区的顶部和/侧部位置上设置有用于清水进入的供液部,集污区的底部和/侧部位置上设置有用于污水排出的排液部。
23.前述的一种地面清洁设备,还包括维护站,维护站用于对清洁机进行维护,当清洁机停靠在维护站上时维护站可执行对清洁机进行供液模式和/或排污模式,且维护站上设置有引导模块,当清洁机执行自移动清洁模式时可被引导模块引导来停靠在维护站上,当清洁机执行手持清洁模式时可被第三模块带动引导来停靠在维护站上。
24.前述的一种地面清洁设备,维护站包括站主体,当第一模块和第二模块相连且清洁机停靠在维护站上时站主体与第一模块或第二模块之间设置第一限位结构,当第一模块和第三模块相连安装且清洁机停靠在维护站上时站主体与第一模块之间设置第二限位结构和/或站主体与第三模块之间设置第三限位结构。
25.前述的一种地面清洁设备,维护站上设置有蓄液区和蓄污区,当清洁机停靠在维护站上时可使得蓄液区与供液区对应可进行供液模式来对供液区供给清水且使得蓄污区与集污区对应可进行排污模式来对集污区进行收集污水。
26.前述的一种地面清洁设备,蓄液区上设置有送液部且送液部与供液部的位置对应可将蓄液区内的清水供给到供液区内;和/或,蓄液区上设置有送液部且送液部与供液部的位置对应可将蓄液区内的清水供给到供液区内且蓄液区上设置有清水进入的补液部。
27.前述的一种地面清洁设备,蓄污区上设置有接污部且接污部与排液部的位置对应可将集污区内的污水排送到蓄污区内;和/或,蓄污区上设置有接污部且接污部与排液部的位置对应可将集污区内的污水排送到蓄污区内且蓄污区上设置有污水排出的排污部。
28.前述的一种地面清洁设备,蓄液区与集污区设置为通过第一通道相连来用于供给清水到集污区内进行清洗的结构;和/或,蓄液区与蓄污区设置为通过第二通道相连来用于供给清水到蓄污区内进行清洗的结构。
29.与现有技术相比,本实用新型具有如下有益效果:
30.本方案的清洁机设置为可以在地面上移动来执行自移动清洁模式和手持清洁模式,用户可以根据使用需求来使得清洁机进行选择切换通过自移动清洁模式或手持清洁模式来对地面进行清洁处理,可见本方案的清洁机能够更好的适应用户的使用需求,极大的提升了用户的使用体验效果。
31.本方案的清洁机通过设置第一模块、第二模块、第三模块,第一模块和第二模块相连时可实现清洁机来执行自移动清洁模式,实现清洁机在地面上自主移动来对地面进行清洁处理,第一模块和第三模块相连时可实现清洁机来执行手持清洁模式,实现用户通过第三模块来带动清洁机在地面上移动来对地面进行清洁处理,使得清洁机能够较好的适应用户的使用需求,提升用户的使用体验效果。
32.本方案的清洁机具备多功能的使用效果,当用户需要手动来对室内地面特定的位置进行及时有效的清洁处理时此时可以通过第三模块来带动清洁机移动执行手持清洁模式,当用户需要对室内地面进行全面的清洁处理时此时可以通过第二模块来实现清洁机自主移动来执行自移动清洁模式,解决现有清洁机的清洁模式单一的问题。
33.本方案通过设置第一检测模块、第二检测模块来实现对应的对第二模块、第三模块进行检测,以便基于检测结果来判断清洁机可以执行自移动清洁模式还是手持清洁模式,提升清洁机执行清洁处理的可靠性。
34.本方案设置清洁机在自移动清洁模式中拖擦件的旋转滚动速度为q,设置在手持清洁模式中拖擦件的旋转滚动速度为e并设置q小于等于e,使得清洁机能够较好的匹配自移动清洁模式和手持清洁模式的工作速度,满足用户需要在手持清洁模式下来实现的拖擦件快速旋转滚动来强力清洁的效果,进而降低用户的使用强度,以及满足用户需要在自移动清洁模式下来实现的拖擦件慢速旋转滚动来对室内地面进行全覆盖行走的清洁效果,进而提高对室内地面的清洁覆盖率。
35.本方案的供液区的结构结合拖擦件及集污区的的结构,可以实现在对拖擦件进行供给清水进行清洗的过程中实现对拖擦件清洗的污水在重力作用下来自然流动收集到集污区内,无需设置收集污水的动力结构,整体结构简单,收集污水的效果更好。
36.本方案的集污组件的结构设置,实现可以对拖擦件在对地面进行清洁处理过程中来更好的实现将拖擦件上的污水进行引导集中收集,同时提升对拖擦件的清洁效果和清洗效率,防止污水分散,有效解决污水对地面的二次污染的问题。
37.本方案的集污组件的结构设置可以实现在对污水的收集过程中能够防止污水随拖擦件旋转滚动而被甩出,实现将污水集中在拖擦腔上进行集中收集,可以有效的防止污水被甩出分散的问题。
38.本方案的集污组件设置刮部、凸部等结构,实现对拖擦件的刮擦挤压来进行收集污水,同时可以有效防止拖擦件被损坏的问题发生,确保拖擦件在高可靠性、高稳定性的结构下来旋转滚动同时通过挤压来实现对污水的排出和引导收集,提升了清洁机的可靠性。
39.本方案的集污组件结构有利于实现在对拖擦件进行清洗的过程中实现污水快速与拖擦件进行分离,实现引导污水及时离开拖擦件来进行流动收集,进一步提升对拖擦件的清洗效果,有效防止拖擦件上残留污水的问题。
40.本方案的地面清洁设备,通过设置维护站来对清洁机进行维护处理,清洁机在工作的过程中需要清水和收集污水,通过设置维护站来对清洁机进行供给清水和收集污水,用户定期来对维护站进行维护即可,无需频繁来对清洁机进行维护处理。
41.本方案的清洁机与维护站之间限位对接结构可以实现清洁机稳定地停靠在维护站上来进行对接维护,实现维护站来对清洁机稳定的供给清水和排送污水。
42.本方案的清洁机的结构实现清洁机在自移动清洁模式下和在用户手持带动移动来执行手持清洁模式下均方便来对实现清洁机与维护站之间的对接进行供给补充清水和对接排送污水,特别是在手持清洁模式下只需要用户通过第三模块来将清洁机推动到维护站即可实现对接维护效果,对接维护的结构整体简单且方便用户来进行对接进行对清洁机的维护处理。
43.本方案的维护站实现对清洁机进行稳定的供给补充清水和稳定的来对接收集污水,用户只需要定期来对维护站加清水和倾倒处理污水即可,同时还可以利用维护站上的蓄液区来对清洁机上的集污区或维护站上的蓄污区来供给清水进行清洗,实现对收集污水的结构部分进行清洗,有效的防止清洁机或维护站出现发霉发臭的问题,同时解决需要人为手动进行清洗的问题。
附图说明
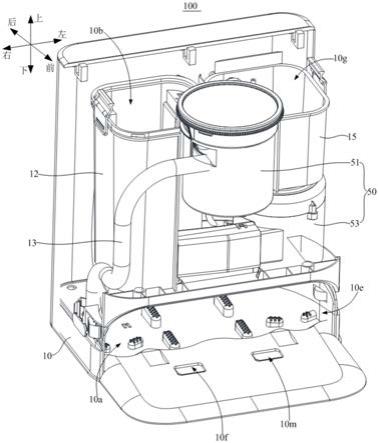
44.图1为第一模块和第二模块相连使得清洁机可以自移动来对地面进行清洁处理的示意图;
45.图2为第一模块和第二模块预安装的示意图;
46.图3为第一模块的结构分布示意图;
47.图4为第一模块和第三模块相连使得清洁机可以被第三模块带动来对地面进行清洁处理的示意图;
48.图5为维护站的示意图;
49.图6为清洁机设置为第一模块和第二模块相连且清洁机位于维护站上来进行维护处理的示意图;
50.图7为清洁机设置为第一模块和第三模块相连且清洁机位于维护站上来进行维护处理的示意图;
51.附图标记:1-清洁机,101-第一模块,1011-拖擦件,1012-拖擦腔,10121-入液部,1013-集污组件,10131-集污通道,10132-刮部,101321-引导部,101322-凸部,10133-压部,102-第二模块,1021-驱动轮,103-第三模块,104-集污区,1041-排液部,105-供液区,1051-供液部,2-维护站,201-蓄液区,2011-送液部,2012-补液部,202-蓄污区,2021-接污部,2022-排污部。
具体实施方式
52.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型。
53.实施例:本实用新型的一种地面清洁设备,如图1至图7构成所示,地面清洁设备包括清洁机1和维护站2,清洁机1可以在地面上移动来执行手持清洁模式和自移动清洁模式,实现清洁机1具备两种清洁模式来更好的适用用户的适用需求,使得清洁机1具备多功能的使用效果,维护站2可以来对清洁机1进行维护处理,主要来进行对接供给清水维护处理和对接排送污水维护处理,这样使得用户定期来维护处理维护站2即可,不需要用户频繁来对清洁机1进行维护处理,方便用户使用,极大的提升了用户的使用体验效果。
54.本方案的一种地面清洁设备,包括清洁机1,清洁机1至少包括第一模块101、第二模块102和第三模块103;清洁机1包括控制模块,控制模块可分别与第一模块101和第二模块102电性相连;第一模块101上设置有擦拖件,拖擦件1011用于接触地面来进行拖地清洁,第二模块102上设置有驱动轮1021,驱动轮1021用于驱动清洁机1在地面上进行移动;当第一模块101和第二模块102相连安装时控制模块可控制清洁机1通过驱动轮1021来执行自移动清洁模式,清洁机1在自移动清洁模式下控制模块控制驱动轮1021旋转滚动来实现清洁机1在地面上进行自移动行走,清洁机1在自移动行走的过程中完成对地面的拖地清洁处理;当第三模块103安装在位时设置第三模块103可相对第一模块101旋转且清洁机1通过第三模块103可执行手持清洁模式,清洁机1在执行手持清洁模式下用户可以通过第三模块103来带动清洁机1在地面上移动来实现对地面的拖地清洁处理;本方案的清洁机1通过设置第一模块101、第二模块102、第三模块103使得清洁机1具备两种清洁模式,即为具备多功能的使用效果,当用户需要手动来对室内地面特定的位置进行及时有效的清洁处理时此时可以通过第三模块103来带动清洁机1移动执行手持清洁模式,当用户需要对室内地面进行全面的清洁处理时此时可以通过第二模块102来实现清洁机1执行自移动清洁模式。
55.针对第二模块102上的驱动轮1021,驱动轮1021的数量设置为两个时两个驱动轮1021分别位于第二模块102的底部上来形成并列分布的结构,两个驱动轮1021旋转滚动来实现驱动第二模块102带动第一模块101进行在地面上移动,同时第一模块101上的拖擦件1011工作来对地面进行清洁处理。
56.可选地,第三模块103可以设置为把手杆结构,方便用户手持来使用清洁机1。
57.可见,设置清洁机1可以执行手持清洁模式和自移动清洁模式使得用户可以根据
使用需求来控制清洁机1进行拖地清洁工作,实现更好的适应用户的使用需求。
58.本方案中,在清洁机1上设置有第一检测模块,控制模块与第一检测模块电性相连,当第一检测模块检测到第二模块102安装在位时则控制模块可控制清洁机1执行自移动清洁模式,通过第一检测模块来实现对第二模块102是否安装在位进行检测,以便控制模块来判断清洁机1是否可以执行自移动清洁模式,提高清洁机1的安全性和稳定性。
59.可选地,第一检测模块可以设置为霍尔传感器,此时传感部设置安装在第一模块101上,磁性部设置安装在第二模块102上,即可实现对第二模块102是否安装在位的检测。
60.可选地,第一检测模块可以设置为红外传感器,利用红外发射器和红外接受器来实现对第二模块102是否安装在位的检测效果。
61.本方案中,清洁机1上设置有第二检测模块,控制模块与第二检测模块电性相连,当第二检测模块检测到第三模块103安装在位时则控制模块可控制清洁机1执行手持清洁模式,通过第二检测模块来实现对第三模块103是否安装在位进行检测,以便控制模块来判断清洁机1是否可以执行手持清洁模式,提高清洁机1的安全性和稳定性。
62.可选地,第二检测模块可以设置为霍尔传感器,此时传感部设置安装在第一模块101上,磁性部设置安装在第三模块103上,即可实现对第三模块103是否安装在位的检测。
63.可选地,第二检测模块可以设置为红外传感器,利用红外发射器和红外接受器来实现对第三模块103是否安装在位的检测效果。
64.本方案通过设置第一检测模块、第二检测模块来实现对应的对第二模块102、第三模块103进行检测,以便基于检测结果来判断清洁机1可以执行自移动清洁模式还是手持清洁模式,提升清洁机1执行清洁处理的可靠性。
65.为了进一步提升用户对清洁机1执行手持清洁模式和自移动清洁模式的适应性,本方案的拖擦件1011设置为柱形结构且设置为可旋转滚动的结构,主要为拖擦件1011接触地面来旋转滚动进行拖地清洁处理,并设置在自移动清洁模式中拖擦件1011的旋转滚动速度为q,设置在手持清洁模式中拖擦件1011的旋转滚动速度为e,并设置q小于等于e;在自移动清洁模式下拖擦件1011的旋转滚动速度为q的状态下清洁机1实现在地面上自移动行走来对地面全面进行覆盖执行拖地清洁任务,此时拖擦件1011的旋转滚动速度相比在手持清洁模式下拖擦件1011的旋转滚动速度低可以实现降低对额定电量的消耗,在自移动清洁模式中清洁机1会规避障碍物来自移动导致清洁机1需要更长的工作时间才能完成对地面的拖地清洁处理,此时设置拖擦件1011的旋转滚动速度低有利于使得清洁机1的工作时间得到增长,且拖擦件1011对地面的清洁处理效果较好,同时可以防止清洁机1在自移动行走过程中因拖擦件1011的旋转滚动速度高导致清洁机1行走不稳定出现打滑、抖动的问题,通过在手持清洁模式中设置拖擦件1011的旋转滚动速度为e的状态下清洁机1实现在地面上被用户带动移动来进行拖地清洁,此时拖擦件1011的旋转滚动速度相比在自移动模式下拖擦件1011的旋转滚动速度高可以实现用户来带动清洁机1快速移动来完成对地面的清洁处理,有利于降低用户的工作时间,即为降低用户的使用强度,此时拖擦件1011的旋转滚动速度高使得拖擦件1011的清洁去污能力强能够确保对地面有较好的清洁处理效果,同时在额定的电量下可以满足用户来快速带动清洁机1移动完成对地面的清洁任务。
66.可以理解的时,在手持清洁模式下用户的需求为在快速的时间内完成对地面的清洁处理,而在自移动清洁模式下用户需要清洁机1具有更长的工作时间来对地面的全部区
域进行移动行走覆盖来进行清洁处理,当在清洁机1的额定电量的限定下,此时通过设置q小于等于e能够实现清洁机1更好的来满足用户对清洁机1的使用需求,提升清洁机1对用户的可适应性。
67.本方案设置清洁机1在自移动清洁模式中拖擦件1011的旋转滚动速度为q,设置在手持清洁模式中拖擦件1011的旋转滚动速度为e并设置q小于等于e,使得清洁机1能够较好的匹配自移动清洁模式和手持清洁模式的工作速度,满足用户需要在手持清洁模式下来实现的拖擦件1011快速旋转滚动来强力清洁的效果,进而降低用户的使用强度,以及满足用户需要在自移动清洁模式下来实现的拖擦件1011慢速旋转滚动来对室内地面进行全覆盖行走的清洁效果,进而提高对室内地面的清洁覆盖率。
68.本方案中,清洁机1上还设置有集污区104和供液区105,至少供液区105的一部分位于集污区104的上部使得供液区105的清水可以来向下流动被供给到拖擦件1011上实现对拖擦件1011的清洗效果,拖擦件1011运动过程中接触清水形成清洗效果,可以为供液区105的清水在重力下流动来接触到拖擦件1011实现清洗效果,集污区104位于供液区105的下部来实现利用污水的重力实现对污水的收集效果,其中,供液区105用于向拖擦件1011供给清水,集污区104用于收集拖擦件1011上的污水,供液区105向拖擦件1011供给清水使得拖擦件1011呈湿润结构并且清水能够形成对拖擦件1011的清洗效果,集污区104用于来将拖擦件1011上吸附的污水进行收集,实现拖擦件1011在清洗中持续收集污水,使得用户无需单独拆卸拖擦件1011来进行清洗,同时因拖擦件1011处于连续的持续清洗状态下使得拖擦件1011能够保持实时的干净状态来接触地面进行清洁,有利于提升对地面的清洁效果,减少污水对地面的二次污染。
69.本方案中,第一模块101作为对地面进行接触清洁的主要部分,主要将拖擦件1011设置在第一模块101上,第一模块101上设置有拖擦腔1012,拖擦腔1012主要用于安装拖擦件1011,拖擦腔1012位于拖擦件1011的外侧部且设置为与集污区104相连通的结构,至少集污区104的一部分位于拖擦件1011的外侧部位置来使得拖擦件1011上的污水在重力下进入到集污区104内收集,拖擦件1011在拖擦腔1012内可以运动,其中,拖擦件1011产生的污水可以被集聚在拖擦腔1012内并进入到集污区104内进行收集,主要将拖擦件1011上吸附的污水进行有效的收集处理。
70.可选地,本方案的拖擦腔1012设置为位于拖擦件1011的外侧部且设置为与集污区104相连通的结构来形成拖擦件1011上的污水能够在重力作用下被收集到集污区104内,集污区104位于拖擦件1011的外侧部位置来实现对污水的收集效果。
71.本方案对污水的收集主要利用污水的重力来进行收集,无需设置吸取污水的动力结构,使得整体结构简单,且在收集污水的过程中不会出现噪音,极大的提升了用户的使用体验效果。
72.为了实现对拖擦件1011上吸附的污水进行有效的收集,主要为供液区105对拖擦件1011供给清水来进行清洗过程中形成的污水,本方案的第一模块101上还设置有集污组件1013,集污组件1013主要用于来对拖擦件1011进行挤压来使得拖擦件1011上的污水进行排出,然后引导污水进入到集污区104内进行有效收集,集污组件1013位于拖擦件1011的外侧部位置上,集污组件1013至少包括集污通道10131,集污通道10131设置为分别与拖擦腔1012和集污区104相连通的结构,集污通道10131主要用于污水的集中进入来流动到集污区
104内进行收集,拖擦件1011上的污水被排出后会在拖擦腔1012的引导下流动到集污通道10131内,然后从集污通道10131内流动到集污区104内进行收集,实现对污水的收集效果。
73.为了实现较好的引导污水进行收集,本方案设置至少集污通道10131的一部分位于拖擦件1011的顶部的下侧位置以便实现污水在重力作用下来进入到集污通道10131内,且集污通道10131设置为朝向集污区104方向呈由高至低逐渐倾斜延伸伸出的结构,实现污水在重力作用下通过集污通道10131进入到集污区104内收集,提升对污水的收集效果。
74.本方案的拖擦件1011的结构及运动结构部分,拖擦件1011设置为柱形结构,主要设置为圆柱形结构,且设置为可沿a方向旋转滚动的结构,即为拖擦件1011接触地面旋转滚动来实现对地面的清洁处理,至少集污区104的一部分和集污组件1013的一部分位于沿a方向由拖擦件1011的顶部至拖擦件1011的底部的外侧部区域位置上,以便集污组件1013来实现对拖擦件1011上的污水进行挤压引导,并将污水引导进入到集污区104内进行收集,形成清洁机1上的收集污水的结构。
75.可选的,a方向可以设置为顺时针方向或逆时针方向,只需要满足实现拖擦件1011旋转滚动的运动结构即可。
76.可选地,拖擦件1011的外表面设置有软性结构层,软性结构层可以设置为布材质构成或海绵材质构成,实现能够接触地面进行拖地清洁的效果。
77.本方案的集污组件1013的结构设置,实现可以对拖擦件1011在对地面进行清洁处理过程中来更好的实现将拖擦件1011上的污水进行引导集中收集,同时提升对拖擦件1011的清洁效果和清洗效率,防止污水分散,有效解决污水对地面的二次污染的问题。
78.本方案的集污组件1013的结构设置可以实现在对污水的收集过程中能够防止污水随拖擦件1011旋转滚动而被甩出,实现将污水集中在拖擦腔1012上进行集中收集,可以有效的防止污水被甩出分散的问题。
79.为了实现集污组件1013更好的来对拖擦件1011上的污水进行挤压出进行收集,本方案的集污组件1013还包括刮部10132,刮部10132设置为与拖擦件1011的外表面相互接触的结构,刮部10132形成与拖擦件1011的外表面之间的挤压刮擦结构来实现将拖擦件1011上的污水挤压出进而实现在清水的供给下对拖擦件1011进行刮擦清洗,同时为了实现对污水的引导收集本方案在刮部10132上还设置有引导部101321,引导部101321设置为朝向拖擦件1011的外侧的下侧方向延伸伸出的结构并设置引导部101321与集污通道10131相连,主要为朝向拖擦件1011的下侧并朝向集污区104方向倾斜来实现将污水引导进入到集污区104内进行收集,刮部10132将拖擦件1011上的污水挤压出后,污水沿引导部101321进行流动进入到集污区104内,实现对污水的引导收集效果,同时有利于污水在重力作用下来进行流动引导收集,提升对污水的收集效率。
80.针对刮部10132的具体结构部分,刮部10132上设置有凸部101322,凸部101322设置为朝向拖擦件1011的截面的中部区域或朝向拖擦件1011的截面的中心区域来构成与拖擦件1011的外表面相互接触的结构,凸部101322的结构能够较好的形成与拖擦件1011的外表面之间来形成挤压刮擦的结构,有利于在拖擦件1011旋转滚动的运动状态下来通过凸部101322将拖擦件1011上的污水进行挤压出进行收集,且同时凸部101322可以防止将拖擦件1011的外表面损坏,同时凸部101322在对拖擦件1011的挤压过程中使得挤压力朝向拖擦件1011的截面的中部区域或朝向拖擦件1011的截面的中心区域来降低凸部101322对拖擦件
1011旋转滚动的影响,使得凸部101322相对拖擦件1011的挤压力能够使得拖擦件1011保持稳定地运动状态,防止因凸部101322挤压导致拖擦件1011旋转滚动偏移或运动不稳定的问题发生。
81.针对凸部101322的结构,本方案的凸部101322设置为位于沿a方向由拖擦件1011的顶部至拖擦件1011在水平方向上的靠近集污区104的侧部的区域位置上来形成与拖擦件1011的外表面相互接触的结构,使得凸部101322在接触拖擦件1011的外表面形成挤压的结构时挤压出污水,并使得污水能够及时在重力作用下朝向下方来流动进行收集,污水不会朝向拖擦件1011上远离集污区104的一侧,形成污水只会朝向拖擦件1011上靠近集污区104的一侧方向流动,防止出现污水留在拖擦腔1012内的问题发生。
82.针对供液区105来对拖擦件1011供给清水的结构部分,本方案的拖擦腔1012上还设置有入液部10121,入液部10121可以设置为孔状结构,入液部10121可以设置为多个,且多个入液部10121沿拖擦件1011的旋转轴线方向分布布置,供液区105通过入液部10121与拖擦腔1012相连通来用于向拖擦件1011供给清水,入液部10121设置为位于凸部101322的上侧且位于拖擦件1011的外侧并设置为位于沿a方向由拖擦件1011在水平方向上的远离集污区104的侧部位置至凸部101322的区域位置上来对拖擦件1011供给清水,通过入液部10121的清水向下来形成对拖擦件1011的喷淋清洗效果,同时喷淋清洗的清水对拖擦件1011的清洗过程中形成污水使得污水在重力下来进行流动到集污区104内进行收集,以及清水在喷淋清洗的过程中会形成对污水的推动效果来实现对污水的有效收集效果。
83.优选地,入液部10121设置为位于凸部101322的上侧且位于拖擦件1011的外侧并设置为位于沿a方向由拖擦件1011顶部位置至凸部101322的区域位置上来对拖擦件1011供给清水的结构,这样使得从拖擦件1011的上方来形成供给清水的结构,有利于清水来形成向下的喷淋清洗结构,且有利于将污水集中在拖擦件1011的顶部上靠近集污区104的一侧方向上,有利于来对污水进行集中收集,可以充分利用污水的重力来实现对污水的收集效果,污水不会朝向拖擦件1011上远离集污区104的一侧,形成污水只会朝向拖擦件1011上靠近集污区104的一侧方向流动,防止出现污水留在拖擦腔1012内的问题发生。
84.可选地,供液区105与入液部10121之间设置泵结构或阀结构来实现将供液区105内的清水移送到拖擦件1011上来实现供给清水用于拖擦件1011的清洗效果。
85.本方案的集污组件1013设置刮部10132、凸部101322等结构,实现对拖擦件1011的刮擦挤压来进行收集污水,同时可以有效防止拖擦件1011被损坏的问题发生,确保拖擦件1011在高可靠性、高稳定性的结构下来旋转滚动同时通过挤压来实现对污水的排出和引导收集,提升了清洁机1的可靠性。
86.本方案中,为了防止拖擦件1011在旋转滚动的过程中导致污水被甩出,且为了防止在对拖擦件1011的清洗过程中污水分散,本方案的集污组件1013还包括压部10133,压部10133设置为与拖擦件1011的外表面相互接触的结构,且压部10133位于沿a方向由拖擦件1011在水平方向上的远离集污区104的侧部位置至入液部10121的区域位置上,这样使得压部10133与拖擦件1011之间形成密封结构使得在对拖擦件1011进行清洗过程中形成的污水能够集中在压部10133的一侧,即为压部10133靠近集污区104的一侧,防止污水沿拖擦件1011向下滴落到地面上形成二次污染,且有利于对污水进行集中来进行有效收集,同时也可以实现入液部10121进入的清水能够集中来对拖擦件1011进行清洗,整体上提升对拖擦
件1011的清洗效果和对污水的收集效果。
87.优选地,压部10133设置位于沿a方向由拖擦件1011的顶部位置至入液部10121的区域位置上的结构,这样使得压部10133在与拖擦件1011之间形成的密封结构能够使得污水能够更好的在重力下被引导进入到集污区104内,污水不会朝向拖擦件1011上远离集污区104的一侧,形成污水只会朝向拖擦件1011上靠近集污区104的一侧方向流动,防止出现污水留在拖擦腔1012内的问题发生。
88.本方案中,为了方便对清洁机1进行维护处理,本方案设置至少集污区104的侧部的一部分位于第一模块101的后侧且当第二模块102安装在第一模块101上时使得第二模块102的侧部对集污区104的侧部形成包覆相接触的结构,这样使得形成将集污区104安装在第二模块102的内侧,使得第二模块102被拆卸下时直接形成集污区104的外侧为外露面,此时方便用户来对集污区104进行及时的维护处理,如来对集污区104内的污水进行排出等,极大的提升了用户对集污区104进行维护的便捷性;或,设置至少集污区104的侧部的一部分位于第一模块101的后侧且当第二模块102未安装在位时使得集污区104的侧部的一部分形成为第一模块101的侧部的一部分的结构,这样使得形成将集污区104安装在第二模块102的内侧,使得第二模块102被拆卸下时直接形成集污区104的外侧为外露面,此时方便用户来对集污区104进行及时的维护处理,如来对集污区104内的污水进行排出等,极大的提升了用户对集污区104进行维护的便捷性;其中,当清洁机1为第一模块101和第三模块103安装在位时,此时清洁机1执行手持移动的清洁功能时方便用户来对集污区104进行维护处理,因集污区104的侧部为第一模块101的侧部来形成外露结构,用户可以直接来进行维护处理排放污水。
89.本方案中,拖擦件1011旋转滚动时拖擦件1011的移动速度与驱动轮1021旋转滚动时驱动轮1021的移动速度设置为不相等,具体地,主要为拖擦件1011旋转滚动时拖擦件1011的水平移动速度与驱动轮1021在旋转滚动时驱动轮1021的水平移动速度不相等,这样使得清洁机1在被驱动轮1021驱动进行移动的过程中会带动拖擦件1011进行滑动效果,即为拖擦件1011绕自身旋转滚动的同时且在地面上进行滑动移动,实现对地面的清洁效果的提升,有利于对顽固污渍进行有效的去除。
90.本方案中针对供液区105内用于清水进入的结构部分,供液区105的顶部和/侧部位置上设置有用于清水进入的供液部1051,供液部1051用于对接来实现清水通过供液部1051进入到供液区105内,实现向供液区105补充清水的效果,可选地,可以将供液部1051设置为可开闭的结构,如供液部1051设置为阀结构,或者供液部1051设置为软性硅胶结构,且软性硅胶结构在对接中可以变形打开,在正常的状态下软件硅胶结构处于关闭状态,进而实现供液部1051的可开闭效果;针对集污区104内的污水进行向外排出的结构部分,本方案的集污区104的底部和/侧部位置上设置有用于污水排出的排液部1041,排液部1041用于对接实现将集污区104内的污水向外进行排出,实现清洁机1收集的污水进行排出的效果,排液部1041可以设置为可开闭的结构,如排液部1041设置为阀结构,或者排液部1041设置为可开闭的软性硅胶结构,只需要满足排液部1041可以实现污水通过来向外排出即可。
91.本方案的供液区105上设置供液部1051,集污区104上设置排液部1041,这样方便来对供液区105和集污区104进行维护处理。
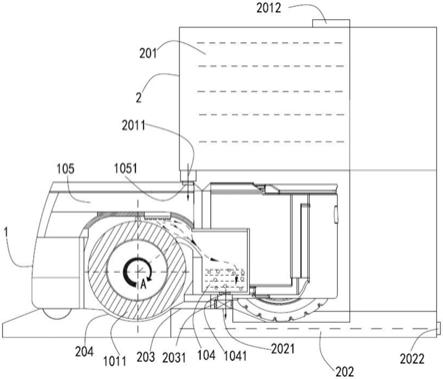
92.本方案的地面清洁设备还包括维护站2,维护站2用于对清洁机1进行维护,当清洁
机1停靠在维护站2上时维护站2可执行对清洁机1进行供液模式和/或排污模式,即为清洁机1停靠在维护站2上时维护站2启动工作来对清洁机1进行供给清水用于拖擦件1011进行拖地清洁,同时维护站2启动工作来对清洁机1在拖地清洁过程中收集的污水来进行排送收集,实现维护站2对清洁机1的维护效果;且维护站2上设置有引导模块,当清洁机1执行自移动清洁模式时可被引导模块引导来停靠在维护站2上,当清洁机1执行手持清洁模式时可被第三模块103带动引导来停靠在维护站2上。
93.可选地,引导模块设置为红外引导模块,包括红外发射器,清洁机1上安装红外接收器,实现将清洁机1引导至维护站2上来进行停靠,特别是当清洁机1在执行自移动清洁模式时可以有效的被引导至维护站2上进行停靠来进行维护处理。
94.其中,当清洁机1在执行手持清洁模式下,用户可以通过第三模块103来对清洁机1进行推动引导至维护站2上来进行停靠,可以实现清洁机1稳定地停靠在维护站2上来进行维护处理。
95.具体地,维护站2包括站主体,当第一模块101和第二模块102相连且清洁机1停靠在维护站2上时站主体与第一模块101或第二模块102之间设置第一限位结构,第一限位结构可以设置为对应的凸块和凹槽,或者第一限位结构设置为至少清洁机1的第一模块101或第二模块102的一部分与站主体的一部分相互接触并形成限位的结构,使得清洁机1能够通过第一限位结构形成限位结构下来稳定准确的停靠在维护站2上来进行维护处理;当第一模块101和第三模块103相连安装且清洁机1停靠在维护站2上时站主体与第一模块101之间设置第二限位结构和/或站主体与第三模块103之间设置第三限位结构,第二限位结构和第三限位结构可以设置为对应的凸块和凹槽,或者第二限位结构设置为至少清洁机1的第一模块101的一部分与站主体的一部分相互接触并形成限位的结构,或者第三限位结构设置为至少清洁机1的第三模块103的一部分与站主体的一部分相互接触并形成限位的结构,可见,使得清洁机1在执行手持清洁模式下和在执行自移动清洁模式下均可实现稳定地限位停靠在维护站2上,以便维护站2启动来对清洁机1进行稳定的维护处理。
96.维护站2上设置有蓄液区201和蓄污区202,蓄液区201用于盛放清水,蓄污区202用于收集污水,以便清洁机1停靠在维护站2上时来对接供给补充清水和对接排送收集污水,当清洁机1停靠在维护站2上时可使得蓄液区201与供液区105对应可执行供液模式,供液模式下来对供液区105供给清水,且使得蓄污区202与集污区104对应可执行排污模式,排污模式下可对集污区104进行收集污水;其中,可以为蓄液区201与供液区105的位置对应并可以相连通来用于清水从蓄液区201进入到供液区105内实现供给清水,也可以为蓄液区201与供液区105之间对应相连通来用于清水从蓄液区201进入到供液区105内实现供给清水,同样的,可以为蓄污区202与集污区104的位置对应并可以相连通来用于污水从集污区104进入到蓄污区202内实现排送收集污水,也可以为蓄污区202与集污区104对应相连通来用于污水从集污区104进入到蓄污区202内实现排送收集污水,即可实现维护站2对清洁机1的对接维护效果。
97.针对维护站2来对清洁机1供给补充清水的结构部分,第一种方式为,蓄液区201上设置有送液部2011且送液部2011与供液部1051的位置对应可将蓄液区201内的清水供给到供液区105内,主要在蓄液区201上设置送液部2011,当清洁机1停靠在维护站2上时使得送液部2011与供液部1051的位置对应形成对接相通的结构,此时送液部2011与供液部1051相
通使得蓄液区201和供液区105之间形成对应的相通结构可以实现蓄液区201内的清水流动进入到供液区105内实现补充供给清水的效果,这样无需用户频繁来对供液区105补充清水,只需要定期或周期性地来对蓄液区201加清水即可,实现维护站2对清洁机1的供给清水效果;和/或,第二种方式为,蓄液区201上设置有送液部2011且送液部2011与供液部1051的位置对应可将蓄液区201内的清水供给到供液区105内且蓄液区201上设置有清水进入的补液部2012,主要在蓄液区201上设置送液部2011,当清洁机1停靠在维护站2上时使得送液部2011与供液部1051的位置对应形成对接相通的结构,此时送液部2011与供液部1051相通使得蓄液区201和供液区105之间形成对应的相通结构可以实现蓄液区201内的清水流动进入到供液区105内实现补充供给清水的效果,同时在蓄液区201上设置补液部2012,补液部2012设置为与蓄液区201相连通来用于清水的进入,此时补液部2012可以设置为直接对接用户室内的水龙头或水管实现使得蓄液区201可以直接进行加清水,无需用户来对蓄液区201加清水,这样使得维护站2也不需要用户定期来加清水,可实现通过用户室内的水龙头或水管来实现持续地对蓄液区201加清水,同时蓄液区201可以持续地对供液区105来进行对接加清水。
98.可选地,蓄液区201的容积设置为供液区105的容积的倍数,这样使得蓄液区201可以来对供液区105进行多次补充供给清水,如用户对蓄液区201加一次清水可以实现蓄液区201对供液区105对接补充10-30次清水,使得用户只需要定期来对蓄液区201加清水即可。
99.针对维护站2来对清洁机1进行排送污水进行收集的结构部分,第一种方式为,蓄污区202上设置有接污部2021且接污部2021与排液部1041的位置对应可将集污区104内的污水排送到蓄污区202内,主要在蓄污区202上设置接污部2021,同时使得接污部2021与排液部1041的位置对应来对接形成相连通的结构,通过接污部2021和排液部1041使得蓄污区202和集污区104之间形成对应的相连通结构,实现污水可以从集污区104流动进入到蓄污区202内,这样无需用户来频繁对集污区104进行倾倒处理,只需用户定期或周期性来对蓄污区202进行倾倒处理即可,实现维护站2对清洁机1的对接排送收集污水的维护效果;和/或,第二种方式为,蓄污区202上设置有接污部2021且接污部2021与排液部1041的位置对应可将集污区104内的污水排送到蓄污区202内且蓄污区202上设置有污水排出的排污部2022,主要在蓄污区202上设置接污部2021,同时使得接污部2021与排液部1041的位置对应来对接形成相连通的结构,通过接污部2021和排液部1041使得蓄污区202和集污区104之间形成对应的相连通结构,实现污水可以从集污区104流动进入到蓄污区202内,同时在蓄污区202上设置排污部2022,排污部2022与蓄污区202内相连通来使得蓄污区202内的污水可以通过排污部2022向外排出,此时排污部2022可以设置为与用户室内的下水道相连来实现直接将维护站2收集的污水进行向外排出,不仅实现了无需用户频繁来对集污区104进行倾倒处理,还实现了无需用户来对蓄污区202进行倾倒处理,极大的提升了用户的使用体验效果。
100.可选地,蓄污区202的容积设置为集污区104的容积的倍数,这样使得集污区104内的污水可以被多次对接排送收集到蓄污区202内,这样可以使得清洁机1能够多次停靠到维护站2上来进行对接排送污水进行收集。
101.其中,针对排液部1041的结构部分,当排液部1041位于集污区104的侧部时排液部1041位于集污区104在竖直方向上的底部的上方与中部的下方之间的区域位置内,这样使
得排液部1041能够将集污区104内的污水进行有效的排出,防止集污区104内存在污水残留的问题;或,当排液部1041位于集污区104的侧部时排液部1041与集污区104的内部空间相连通的位置位于集污区104在竖直方向上的底部的上方与中部的下方之间的区域位置内,此时使得排污部2022的一端位于集污区104的侧部且排污部2022的另一端与集污区104的内部空间相连通,且相连通的位置使得集污区104内的污水可以进行有效的排出,防止集污区104内存在污水残留的问题。
102.可选地,此时可以在集污区104与蓄污区202之间设置泵结构或阀结构来实现对污水的排送收集效果,排液部1041可以设置为可以开闭的结构,或者接污部2021可以设置为可开闭的结构,也可以设置当排液部1041和接污部2021之间相对应时实现排液部1041和接污部2021均处于打开结构来实现对接排送污水,只需要实现维护站2可以来进行对接污水排送收集即可。
103.其中,针对排液部1041的结构部分,当排液部1041位于集污区104的底部时,维护站2上设置有工作区,工作区可以实现来对第一模块101的底部进行支撑,工作区位于第一模块101的底部的下侧,且工作区上设置有排污罩,排污罩的下侧与接污部2021相连来用于污水的通过进行收集,此时集污区104内的污水可以在重力作用下向下流动排出进入到排污罩内,排污罩设置与蓄污区202相连通实现对污水的收集效果,主要利用重力实现对污水的收集效果,可以将排污罩设置为软性结构使得排污罩的顶部能够与第一模块101的底部之间相互接触形成密封结构,
104.为了防止维护站2在对清洁机1进行维护的过程中导致拖擦件1011上的污水外溢分散,本方案的维护站2上设置有清洗区,清洗区位于拖擦件1011的下侧,清洗区至少部分呈凹陷结构来位于拖擦件1011的外侧部位置上,实现拖擦件1011在维护站2上进行旋转滚动来进行清洗时不会出现污水被甩出到维护站2外,可以有效的实现拖擦件1011在清洗过程中甩出的污水会集聚在清洗区内,同时拖擦件1011会吸附清洗区的污水然后使得被甩出的污水再次被吸附后进行清洗实现进行收集到清洁机1内的集污区104内,实现对清洁机1进行更好的维护处理。
105.本方案中,为了进一步提升对清洁机1的维护效果,本方案的蓄液区201与集污区104设置为通过第一通道相连来用于供给清水到集污区104内进行清洗的结构,即为清洁机1停靠在维护站2上时使得蓄液区201与集污区104之间对应并相连通来可以实现蓄液区201对集污区104供给清水,以便通过清水来对集污区104进行有效的清洗,防止集污区104内出现发霉发臭的问题,特别是清洁机1在执行清洁任务完成后处于停止待使用的情况下,可以先使得清洁机1停靠在维护站2上来对集污区104进行清洗后再将清洁机1停止待使用,此时可以有效的解决集污区104内发霉发臭滋生细菌的问题,极大的提升用户的使用体验效果,可以在蓄液区201和集污区104之间设置第一通道使得其相互连通来用于清水的流动供给,同时可以在第一通道上设置泵结构或阀结构实现来供给清水的可控制,方便维护站2来对集污区104进行有效的供给清水进行清洗;和/或,本方案还可以在蓄液区201与蓄污区202设置为通过第二通道相连来用于供给清水到蓄污区202内进行清洗的结构,即为维护站2上蓄液区201来供给清水对蓄污区202进行清洗,通过第二通道实现蓄液区201和蓄污区202之间相连通用于清水的流动供给来对蓄污区202进行清洗,防止蓄污区202内出现发霉发臭的问题,通过将蓄污区202内提供清水清洗干净方便用户来对蓄污区202内进行倾倒污水处
理,解决用户手动清洗蓄污区202的问题,特别是用户在不使用清洁机1来执行清洁任务的时候此时维护站2处于闲置状态,将蓄污区202清洗干净可以有效的解决蓄污区202内发霉发臭滋生细菌的问题,极大的提升用户的使用体验效果,同时可以在第二通道上设置泵结构或阀结构来实现来供给清水的可控制,方便维护站2来对蓄污区202进行有效的供给清水进行清洗。
106.可见,本方案中,维护站2不仅可以实现对清洁机1的对接维护处理,即为对接加清水维护处理和对接排送收集污水维护处理,同时维护站2还可以通过供给清水来对集污区104或蓄污区202来进行清洗,解决清洁机1或维护站2引起的对室内环境污染的问题。
107.工作原理:本方案的清洁机1可以在地面上移动来执行手持清洁模式和自移动清洁模式,实现清洁机1具备两种清洁模式来更好的适用用户的适用需求,使得清洁机1具备多功能的使用效果;并设置有维护站2来对清洁机1进行维护处理,主要来对接供给清水和对接排送污水,解决需要用户频繁对清洁机1进行维护的问题;具体地,清洁机1设置有第一模块101、第二模块102、第三模块103,第一模块101和第二模块102相连时可实现清洁机1执行自移动清洁模式,第一模块101和第三模块103相连时可实现清洁机1执行手持清洁模式,实现清洁机1具备多功能的使用效果,使得清洁机1能够较好的适应用户的使用需求,当用户需要手动来对室内地面特定的位置进行及时有效的清洁处理时此时可以通过第三模块103来带动清洁机1执行手持清洁模式,当用户需要对室内地面进行全面的清洁处理时此时可以通过第二模块102来实现清洁机1执行自移动清洁模式,使得清洁机1具备多功能的使用效果;清洁机1在工作的过程中需要清水和收集污水,通过设置维护站2来对清洁机1进行供给清水和收集污水,用户定期来对维护站2进行维护即可,无需频繁来对清洁机1进行维护处理。
108.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围,均在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。