1.本发明涉及下肢动力假肢领域,具体地,涉及一种具有地形识别功能的假肢装置,尤其是一种具有地形识别功能的可调高度膝踝双电机动力假肢装置。
背景技术:
2.根据2006年12月国务院公布的第二次全国残疾人抽样调查结果,我国残疾人占全国总人口的比例为6.34%,其中下肢截肢人数约为158万人。近5年来,因为疾病、交通事故、工伤、自然灾害等因素的影响,大腿截肢人数逐年增加,极大地增加了社会的负担。随着人民经济和生活水平的不断提高,残疾人的支付能力也日益增强,对假肢的需求不再仅仅局限于笨重的被动式假肢,假肢智能化、功能多样化、性能优良化成为现在假肢行业竞争的目标。绝大多数下肢截肢者使用机械被动假肢,这些假肢只能通过消耗使用者的能量来进行驱动。这限制了截肢者有效地执行各种移动模式的能力,尤其是以可变的速度或坡度行走的能力。此外,与这些被动设备一起行走所需的生物力学补偿通常会在日常使用中引起关节不适和背部疼痛。在关节处提供动力的假肢腿有潜力改善截肢者的步态并消除这些问题。于是一种膝踝双电机动力假肢装置就有了巨大的需求。
3.面对急切的社会需求、庞大的社会群体,国内外学术机构针对动力假肢装置的研究还不太成熟,市场上也缺乏功能先进的产品,因此研发新型动力假肢装置,解决残疾人行走困难的问题,具有重要的社会意义和广阔的市场前景。
4.公开号为cn103142333a的专利文献公开了一种假肢,包括一漏斗形的假肢接受腔、连接组件以及假脚,所述连接组件的上端连接假肢接受腔,所述连接组件的下端连接所述假脚;所述假肢接受腔内壁包覆一层软垫,所述假脚内设有缓冲支撑所述连接组件下端的弹性部件,本发明的假肢结构简单,使用舒适,长时间穿戴也不会带来不适。但是该假肢不包括地形识别功能,无法实现不同地形下的行走动作。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种具有地形识别功能的假肢装置。
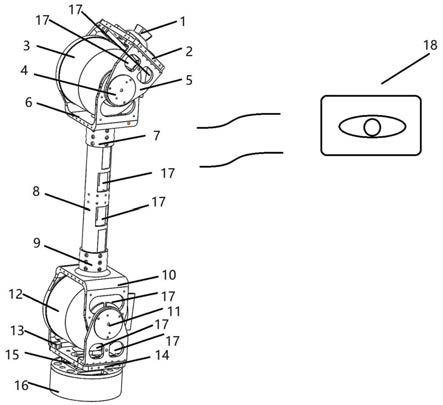
6.根据本发明提供的具有地形识别功能的假肢装置,包括膝关节电机组件、踝关节电机组件、连杆组件、控制器、深度相机以及传感器组件;
7.所述膝关节电机组件连接连杆组件的一端,连杆组件的另一端连接踝关节电机组件,膝关节电机组件上设置有假肢接受腔接头,假肢接受腔接头连接外部装置,所述传感器组件连接踝关节电机组件,深度相机连接控制器,控制器连接膝关节电机组件与踝关节电机组件;
8.所述深度相机能够将地形情况输出到控制器,控制器能够控制膝关节电机组件与踝关节电机组件转动。
9.优选地,所述连杆组件包括连杆、膝关节电机底座、膝关节套筒、踝关节套筒以及
踝关节电机底座;
10.所述膝关节电机底座通过膝关节套筒连接连杆的一端,踝关节电机底座通过踝关节套筒连接连杆的另一端;
11.所述膝关节电机底座连接膝关节电机组件,踝关节电机底座连接踝关节电机组件。
12.优选地,所述连杆的两端均设置有外螺纹,膝关节套筒与踝关节套筒均设置有内螺纹;
13.所述膝关节套筒与踝关节套筒上沿径向开有多个螺纹孔,所述连杆两端设置有外螺纹的曲面有部分沿径向向内凹陷形成一个或多个矩形区域。
14.优选地,所述膝关节电机组件包括膝关节连接垫片、膝关节电机、膝关节轴承以及膝关节转动组件;
15.所述膝关节连接垫片的一面连接假肢接受腔接头,膝关节连接垫片的另一面连接膝关节转动组件,膝关节转动组件通过膝关节轴承连接膝关节电机的转轴;
16.所述膝关节电机连接连杆组件,膝关节电机的转轴与连杆组件的轴线相垂直,膝关节电机能够带动膝关节转动组件绕膝关节电机的转轴旋转。
17.优选地,所述踝关节电机组件包括踝关节连接垫片、踝关节电机、踝关节轴承以及踝关节转动组件;
18.所述踝关节连接垫片的一面连接传感器组件,踝关节连接垫片的另一面连接踝关节转动组件,踝关节转动组件通过踝关节轴承连接踝关节电机的转轴;
19.所述踝关节电机连接连杆组件,踝关节电机的转轴与连杆组件的轴线相垂直,踝关节电机能够带动踝关节转动组件绕踝关节电机的转轴旋转。
20.优选地,所述传感器组件包括传感器连接件与六轴力传感器;
21.所述六轴力传感器通过传感器连接件连接踝关节电机组件;
22.所述六轴力传感器能够检测所述具有地形识别功能的假肢装置的受力情况,并将该受力信息发送给控制器。
23.优选地,所述的具有地形识别功能的假肢装置还包括驱动器;
24.所述驱动器与控制器建立can通信协议连接,控制装置能够给驱动器发送指令,从而驱动膝关节电机组件的膝关节电机与踝关节电机组件的踝关节电机转动。
25.优选地,所述膝关节电机组件的膝关节电机中设置有编码器;
26.所述踝关节电机组件的踝关节电机中设置有编码器;
27.所述编码器能够读取膝关节电机与踝关节电机的实际转角并与期望转角求取误差,生成期望轨迹,并将该轨迹信息发送至控制器。
28.优选地,所述膝关节电机组件、踝关节电机组件以及连杆组件上均开有减重挖孔。
29.优选地,所述深度相机连接膝关节连接垫片且朝向斜下方设置;
30.所述深度相机能够以预设频率采集所述具有地形识别功能的假肢装置当前所处位置的rgb图像数据以及深度信息,并将数据输入到事先训练好的卷积神经网络当中,网络输出为地形标签,将地形标签输出到控制器。
31.与现有技术相比,本发明具有如下的有益效果:
32.1、本发明结构简单,操作方便,采用了深度相机获取地形数据,并将采集到的地形
数据输入到事先训练好的卷积神经网络当中去,卷积神经网络的输出为当前地形标签,控制器综合当前地形类型得出最优的控制策略,以达到适应各类不同地形的使用需求。
33.2、本发明采用了两头带螺纹中间带螺纹孔的特制连杆与两电机底座的螺纹套筒相配合的技术手段,起到了假肢高度可自由调节的效果,在兼顾了对于不同身体参数的使用者的兼容性的同时满足了对于假肢稳定性的要求。
34.3、本发明采用了六轴力传感器与编码器实时获取假肢物理与运动参数的技术手段,能够检测使用者的意图,将期望转角,送入控制装置进行轨迹规划,从而调整电机输出力矩大小。
附图说明
35.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
36.图1为本发明一个角度的的结构示意图;
37.图2为本发明另一个角度的的结构示意图;
38.图3为本发明中连杆组件的结构示意图;
39.图4为本发明的系统模块图。
40.图中示出:
41.假肢接受腔接头1
ꢀꢀꢀꢀꢀ
膝关节套筒7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
踝关节转动组件13
42.膝关节连接垫片2
ꢀꢀꢀꢀꢀ
连杆8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
踝关节连接垫片14
43.膝关节电机3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
踝关节套筒9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器连接件15
44.膝关节轴承4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
踝关节电机底座10
ꢀꢀꢀꢀ
六轴力传感器16
45.膝关节转动组件5
ꢀꢀꢀꢀꢀ
踝关节轴承11
ꢀꢀꢀꢀꢀꢀꢀꢀ
减重挖孔17
46.膝关节电机底座6
ꢀꢀꢀꢀꢀ
踝关节电机12
ꢀꢀꢀꢀꢀꢀꢀꢀ
深度相机18
具体实施方式
47.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
48.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
49.本发明公开了一种具有地形识别功能的假肢装置,其特征在于,包括膝关节电机组件、踝关节电机组件、连杆组件、控制器、深度相机18以及传感器组件;
50.所述膝关节电机组件连接连杆组件的一端,连杆组件的另一端连接踝关节电机组件,膝关节电机组件上设置有假肢接受腔接头1,假肢接受腔接头1连接外部装置,所述传感器组件连接踝关节电机组件,深度相机18连接控制器,控制器连接膝关节电机组件与踝关节电机组件;
51.所述深度相机18能够将地形情况输出到控制器,控制器能够控制膝关节电机组件与踝关节电机组件转动。
52.所述连杆组件包括连杆8、膝关节电机底座6、膝关节套筒7、踝关节套筒9以及踝关节电机底座10;所述膝关节电机底座6通过膝关节套筒7连接连杆8的一端,踝关节电机底座10通过踝关节套筒9连接连杆8的另一端;所述膝关节电机底座6连接膝关节电机组件,踝关节电机底座10连接踝关节电机组件。
53.所述连杆8的两端均设置有外螺纹,膝关节套筒7与踝关节套筒9均设置有内螺纹;所述膝关节套筒7与踝关节套筒9上沿径向开有多个螺纹孔,所述连杆8两端设置有外螺纹的曲面有部分沿径向向内凹陷形成一个或多个矩形区域。连杆8与膝关节套筒7、踝关节套筒9均通过螺纹连接,相对旋转能够调节高度,在调整到合适的高度以后,使用螺丝从膝关节套筒7、踝关节套筒9的螺纹孔里旋进去,螺丝的的尾端紧紧抵在连杆8两端的矩形区域上,来起到防止螺纹筒8旋转的目的,在兼顾了动力假肢的高度可调节之外更增加了动力假肢的稳定性,提高了用户的安全保障。
54.所述膝关节电机组件包括膝关节连接垫片2、膝关节电机3、膝关节轴承4以及膝关节转动组件5;所述膝关节连接垫片2的一面连接假肢接受腔接头1,膝关节连接垫片2的另一面连接膝关节转动组件5,膝关节转动组件5通过膝关节轴承4连接膝关节电机3的转轴;所述膝关节电机3连接连杆组件,膝关节电机3的转轴与连杆组件的轴线相垂直,膝关节电机3能够带动膝关节转动组件5绕膝关节电机3的转轴旋转。
55.所述踝关节电机组件包括踝关节连接垫片14、踝关节电机12、踝关节轴承11以及踝关节转动组件13;所述踝关节连接垫片14的一面连接传感器组件,踝关节连接垫片14的另一面连接踝关节转动组件13,踝关节转动组件13通过踝关节轴承11连接踝关节电机12的转轴;所述踝关节电机12连接连杆组件,踝关节电机12的转轴与连杆组件的轴线相垂直,踝关节电机12能够带动踝关节转动组件13绕踝关节电机12的转轴旋转。
56.优选地,所述膝关节转动组件5、膝关节电机底座6、踝关节电机底座10、踝关节转动组件13的尺寸与所使用的膝关节电机3与踝关节电机12外径相契合,在不影响电机正常工作角度内转动的前提下尽可能的减少了尺寸,从而减小了整个动力假肢的体积及重量,提高了便携性。
57.优选地,所述膝关节电机3与踝关节电机12均采用大功率盘式电机,能够大大扩展控制器的操作空间,使得假肢支持了更加复杂的控制算法,能够更好地贴合实际的人体步态,从而提升使用者的舒适度及稳定性。
58.所述传感器组件包括传感器连接件15与六轴力传感器16;所述六轴力传感器16通过传感器连接件15连接踝关节电机组件;所述六轴力传感器16能够检测所述具有地形识别功能的假肢装置的受力情况,并将该受力信息发送给控制器。六轴传感器可以通过感受三个方向的应变从而计算出该方向上受到的力。根据该传感器返回的数据,就可以解算出假肢脚部的姿态从而判断当前假肢处于何种情况,包括但不限于踩到障碍物并判断障碍物大小及位置,上楼梯等特殊情况,这对于假肢控制器的设计有着至关重要的帮助作用。
59.所述的具有地形识别功能的假肢装置还包括驱动器;所述驱动器与控制器建立can通信协议连接,控制装置能够给驱动器发送指令,从而驱动膝关节电机组件的膝关节电机3与踝关节电机组件的踝关节电机12转动,实现多关节的弯曲与伸展,即可达到减轻腿部
肌肉和关节负担的效果。优选地,所述驱动器采用elmo微型伺服驱动器。
60.所述膝关节电机组件的膝关节电机3中设置有编码器;所述踝关节电机组件的踝关节电机12中设置有编码器;所述编码器能够读取膝关节电机3与踝关节电机12的实际转角并与期望转角求取误差,生成期望轨迹,并将该轨迹信息发送至控制器。利用编码器测得的实际转角与期望转角之间的误差,调整电机输出转矩,规划最佳的运动轨迹,带动假肢运动从而减轻使用者的负担,达到矫正步态的作用。
61.所述膝关节电机组件、踝关节电机组件以及连杆组件上均开有减重挖孔17。
62.所述深度相机18连接膝关节连接垫片2且朝向斜下方设置;所述深度相机18能够以预设频率采集所述具有地形识别功能的假肢装置当前所处位置的rgb图像数据以及深度信息,并将数据输入到事先训练好的卷积神经网络当中,网络输出为地形标签,将地形标签输出到控制器。控制器根据当前的地形采取不同的控制策略控制膝关节电机3和踝关节电机12以适应地形,从而取得更好的地形适应效果,同时膝关节和踝关节的绝对值编码器反馈实时关节运动信息给控制器,六轴力传感器16反馈受力信息给控制器来达到更好的控制效果。
63.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。