一种mmc半桥串联结构微电网系统并离网切换控制方法
技术领域
1.本发明涉及微电网控制技术领域,尤其是涉及一种mmc半桥串联结构微电网(modular multilevel converter microgrid,mmc-mg)系统并离网切换控制方法。
背景技术:
2.由于环境污染问题日益严重,以光伏、风力和储能组成的微电网逐渐受到国内外学者的关注,其中交流微电网是主要的研究对象。传统微电网中微源通过桥式逆变器进行并网,不同微源逆变器之间并联,且每个逆变环节输出的电压幅值、相位、频率均不同,从而使系统内产生环流,降低系统电能质量。专利《一种微源半桥变流器串联型微电网系统》提出一种新型微电网拓扑结构。该专利将光伏微源、风力微源经过变换器后与储能系统(energy storage system,ess)并联,然后接入mmc半桥子模块的电容两端,构建了一种模块化多电平串联结构微电网(modular multilevel converter microgrid,mmc-mg)。该微电网具有输出电压正弦度高、频率稳定性好、输出功率等级易扩展等优点。
3.微电网具有孤岛和并网两种运行模式,当系统进行模式切换时,易发生大范围电压、频率波动现象,从而影响系统稳定运行。现有的微电网并离网切换方法有基于状态同步跟随控制的平滑切换控制;在双闭环控制中加入单位增益控制,通过控制模式转换前后电压环和电流环具有相同增益来减少主从结构微电网模式切换时的扰动和暂态影响;将虚拟电流、虚拟功率控制与虚拟同步发电机(virtual synchronous generator,vsg)相结合,使公共耦合点(point of common coupling,pcc)两端电压幅值、相位、频率同步;在传统下垂控制中引入积分环节和相位前馈补偿环节,有效减小模式切换过程中的电流冲击。
4.本系统中含有风、光两种随机性微源,微源出力不稳定,导致发电模块(generation module,gm)直流链电压存在偏差量,这些偏差相互叠加会导致系统输出电压包含直流偏差量和基频偏差量。系统孤岛运行时,这些偏差量会使逆变环节的输出电压产生偏移;当系统由孤岛转为并网运行时,直流偏差量入网会降低并网电流质量,此时直接采用传统微电网并离网切换方法是不可行的。因此,研究一种适用于mmc-mg系统并离网切换控制方法具有重要意义。
技术实现要素:
5.本发明的目的是降低随机性微源波动造成的系统逆变环节输出电压偏移和并网电流直流偏差量,使系统在并离网切换时冲击电流和频率波动有效减小。
6.本发明是一种mmc半桥串联结构微电网系统并离网切换控制方法,其步骤为:步骤(1)计算gm直流链电压波动时,mmc-mg系统逆变环节输出线电压;在载波移相调制下系统输出线电压u
ab
:
式中:u
dc
为gm直流链电压;m为调制比;ω0为调制波角频率;n为投入gm个数;δu
pa
为系统a相上桥臂gm直流链电压偏差量;δu
pb
为系统b相上桥臂gm直流链电压偏差量;δu
na
为系统a相下桥臂gm直流链电压偏差量;δu
nb
为系统b相下桥臂gm直流链电压偏差量;u
ab
为a相和b相之间的线电压;公式一中,u
zab
为u
ab
中的直流偏差分量;u
sab
为u
ab
中的基频偏差量;同理,根据上述方法可得到u
bc
中的直流偏差分量u
zbc
、u
ca
中直流偏差分量u
zca
、u
bc
中的基频偏差量u
sbc
、u
ca
中的基频偏差量u
sca
;其中,u
bc
为b相和c相之间的线电压;u
ca
为c相和a相之间的线电压;步骤(2)在δu
pa
=m,δu
pb
=δu
na
=δu
nb
=0的条件下,对步骤(1)中的u
zab
、u
zbc
、u
zca
进行线电压到相电压的变换,得到u
za
、u
zb
、u
zc
,然后对u
za
、u
zb
、u
zc
进行dq变换,变换结果为:同理,对u
sab
、u
sbc
、u
sca
进行变换,结果为:公式二、三中,m为a相上桥臂电压波动量,α为相位角;由公式二、三可知,u
zab
、u
zbc
、u
zca
和u
sab
、u
sbc
、u
sca
经变换后变为基频分量和二倍频分量,即不再含有直流分量。据以上分析,将系统输出电压u
a/b/c
经过park变换后,通过低通滤波器滤波得到直流偏差量;再与电容电压经dq变换后的u
cd
、u
cq
作差得到交流分量,然后经pi调节后获得电压谐波补偿量δu
a/b/c
,从而对逆变环节输出电压中含有的直流偏差分量和基频偏差量进行抑制;步骤(3)在步骤(2)的基础上加入虚拟同步发电机控制;在vsg调速器方程中引入同步发电机的转子运动方程,两者一起构成vsg的有功-频率调节控制,为系统提供惯性和阻尼特性,增强系统抗干扰能力。其有功—频率环表达式为:
式中:j为转动惯量;pm为vsg的机械功率;pe为vsg的电磁功率;d为阻尼系数;ω为vsg输出的实际角频率;ωn为额定角频率;θ为参考电压相角;p
ref
为有功功率参考值;k
ω
为调差系数;vsg模拟同步发电机的无功-电压下垂特性,调节系统无功偏差,可实现对vsg输出电压的控制,其无功—电压环表达式为:u
ref
=u0 kq(q
ref-q)(公式五)式中:u
ref
为vsg输出电压参考值;u0为额定电压;kq为无功调节系数;q
ref
为无功功率参考值;q为无功功率实际值;所述步骤(1)~步骤(3)在系统孤岛运行时起作用,以维持系统输出电压和频率稳定;mmc-mg系统输出的多余功率需要传输至电网,即系统须并网运行时,执行以下步骤;步骤(4)在所述步骤(1)~步骤(3)的基础上,系统孤岛转并网运行前加入预同步控制;所述步骤(4)中:电压幅值预同步为所述步骤(4)中:电压幅值预同步为所述步骤(4)中:相位同步原理为式中:u
vsg
为逆变环节输出电压的幅值;θ
vsg
为逆变环节输出电压的相位;ug为大电网侧输出电压的幅值;θg为大电网侧输出电压的相位;u
vsg_α
为逆变环节输出电压分解到αβ轴中α轴上的对应值;u
vsg_β
为逆变环节输出电压分解到αβ轴中β轴上的对应值;u
g_α
为大电网侧输出电压分解到αβ轴中α轴上的对应值;u
g_β
为大电网侧输出电压分解到αβ轴中β轴上的对应值;k
pu
为调节电压幅值时pi控制器的比例;k
iu
为调节电压幅值时pi控制器的积分参数;ω
*
为补偿后的角频率;k
pθ
为调节电压相位时pi控制器的比例;k
iθ
为调节电压相位时pi控制器的积分参数;所述步骤(4)中的频率同步调节是在所述步骤(3)的有功—频率环中的转子运动方程上引入积分补偿,即式中,k为频率积分补偿系数。所述步骤(4)中相位预同步、幅值预同步、频率预同步使pcc两侧电压幅值、相位、
频率趋于一致;步骤(5)判断系统是否接收到并网信号;系统孤岛转并网需满足条件为:此时,不满足公式十的条件,重复执行步骤(1)~步骤(4);满足公式十的条件,退出步骤(4),闭合pcc,系统处于并网运行状态;步骤(6)在mmc-mg系统输出的功率不足以传输至电网时,须使系统孤岛运行,此时直接断开pcc,无需添加额外控制策略,继续执行步骤(1)~步骤(3)。
7.本发明的有益之处在于:(1)在mmc-mg系统的电压、电流双闭环中加入电压谐波补偿后,当gm直流链输出电压波动时,可减小逆变环节输出电压产生的偏移,使系统孤岛运行时输出电压波形更平稳;在系统孤岛转为并网运行时,加入电压谐波补偿可降低直流偏差量入网对并网电流质量的影响。(2)在加入电压谐波补偿的基础上,将虚拟同步发电机与预同步控制相结合。系统孤岛转并网时,投入预同步控制,使系统pcc两侧电压幅值、相位差值缩小,有功—频率环上引入积分补偿,以缩小vsg输出频率与网侧频率之差,实现无差调节,从而保障系统可以平稳的从孤岛运行转变为并网运行;当系统并网转孤岛运行时,不需投入预同步控制,直接断开pcc即可,无需添加额外控制策略,即可使系统平稳变为孤岛运行。
附图说明
8.图1是mmc-mg系统拓扑结构,图2是电压波动补偿控制框图,图3是预同步与vsg结合控制策略示意图,图4是mmc-mg系统平滑切换流程图,图5是并网触发条件,图6是mmc-mg系统并离网平滑切换控制框图。
具体实施方式
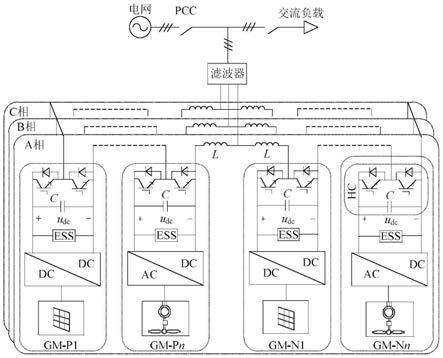
9.下面结合附图和具体实施例对本发明的具体实施方式做进一步说明:mmc-mg系统拓扑结构如图1所示。该系统以mmc结构为基础,将光伏微源、风力微源经过变换器后与储能系统(energy storage system,ess)并联,然后接入mmc半桥子模块的电容两端,构成了发电模块(generation module,gm)。每个桥臂均由n个发电模块和一个电抗器l构成。系统输出端经滤波装置给本地负载供电或将多余的电能送入大电网。
10.步骤(1)计算gm直流链电压波动时,mmc-mg系统逆变环节输出线电压;在载波移相调制(carrier phase shifting spwm,cps-spwm)下系统输出线电压u
ab
:式中:u
dc
为gm直流链电压;m为调制比;ω0为调制波角频率;n为投入gm个数;δu
pa
为系统a相上桥臂gm直流链电压偏差量;δu
pb
为系统b相上桥臂gm直流链电压偏差量;δu
na
为系统a相下桥臂gm直流链电压偏差量;δu
nb
为系统b相下桥臂gm直流链电压偏差量;u
ab
为a相和b相之间的线电压。。
11.公式一中,u
zab
为u
ab
中的直流偏差分量;u
sab
为u
ab
中的基频偏差量;同理,根据上述方法可得到u
bc
中的直流偏差分量u
zbc
、u
ca
中直流偏差分量u
zca
、u
bc
中的基频偏差量u
sbc
、u
ca
中的基频偏差量u
sca
;其中,u
bc
为b相和c相之间的线电压;u
ca
为c相和a相之间的线电压。
12.步骤(2)在δu
pa
=m,δu
pb
=δu
na
=δu
nb
=0的条件下,对步骤(1)中的u
zab
、u
zbc
、u
zca
进行线电压到相电压的变换,得到u
za
、u
zb
、u
zc
,然后对u
za
、u
zb
、u
zc
进行dq变换,最终变换结果为:同理,对u
sab
、u
sbc
、u
sca
进行变换,结果为:公式二、三中,m为a相上桥臂电压波动量,α为相位角。
13.由公式二、三可知,u
zab
、u
zbc
、u
zca
和u
sab
、u
sbc
、u
sca
经变换后变为基频分量和二倍频分量,即不再含有直流分量。据以上分析,电压谐波补偿原理如图2所示。首先,将系统输出电压u
a/b/c
经过park变换后,通过低通滤波器滤波得到直流偏差量;然后,再与电容电压经dq变换后的u
cd
、u
cq
作差得到交流分量,经pi调节后获得电压谐波补偿量δu
a/b/c
;最后,将电压谐波补偿量叠加到调制信号中,从而对逆变环节输出电压中含有的直流偏差分量和基频偏差量进行抑制。
14.步骤(3)在步骤(2)的基础上加入虚拟同步发电机控制;在虚拟同步发电机调速器方程中引入同步发电机的转子运动方程,两者一起构成vsg的有功—频率调节控制,可为系统提供惯性和阻尼特性,增强系统抗干扰能力。其有功—频率环表达式为:
式中:j为转动惯量;pm为vsg的机械功率;pe为vsg的电磁功率;d为阻尼系数;为vsg输出的实际角频率;ωn为额定角频率;θ为参考电压相角;p
ref
为有功功率参考值;k
ω
为调差系数。
15.vsg模拟同步发电机的无功—电压下垂特性,调节系统无功偏差,可实现对vsg输出电压的控制,其无功—电压环表达式为:u
ref
=u0 kq(q
ref-q)(公式五)式中:u
ref
为vsg输出电压参考值;u0为额定电压;kq为无功调节系数;q
ref
、q分别为无功功率参考值和实际值。
16.所述步骤(1)~步骤(3)在系统孤岛运行时起作用,以维持系统输出电压和频率稳定;mmc-mg系统输出的多余功率需要传输至电网,即系统须并网运行时,执行以下步骤;步骤(4)在所述步骤(1)~(3)的基础上,系统孤岛转并网运行前加入预同步控制;所述步骤(4)中:电压幅值预同步为所述步骤(4)中:电压幅值预同步为所述步骤(4)中:相位同步原理为式中:u
vsg
为逆变环节输出电压的幅值;θ
vsg
为逆变环节输出电压的相位;ug为大电网侧输出电压的幅值;θg为大电网侧输出电压的相位;u
vsg_α
为逆变环节输出电压分解到αβ轴中α轴上的对应值;u
vsg_β
为逆变环节输出电压分解到αβ轴中β轴上的对应值;u
g_α
为大电网侧输出电压分解到αβ轴中α轴上的对应值;u
g_β
为大电网侧输出电压分解到αβ轴中β轴上的对应值;k
pu
为调节电压幅值时pi控制器的比例;k
iu
为调节电压幅值时pi控制器的积分参数;ω
*
为补偿后的角频率;k
pθ
为调节电压相位时pi控制器的比例;k
iθ
为调节电压相位时pi控制器的积分参数。
17.所述步骤(4)中的频率同步调节是在所述步骤(3)的有功—频率环中的转子运动方程上引入积分补偿,即式中,k为频率积分补偿系数。
18.步骤(3)和步骤(4)共同组成了基于电压幅值、相位、频率预同步的虚拟同步发电机控制策略,具体如图3所示。步骤(4)的预同步调节使pcc两侧电压幅值、相位、频率趋于一致。
19.步骤(5)判断系统是否接收到并网信号;系统孤岛转并网需满足条件为:
此时,不满足公式十的条件,重复执行(1)~(4);满足公式十的条件,退出步骤(4),闭合pcc,系统处于并网运行状态。
20.步骤(6)在mmc-mg系统输出的功率不足以传输至电网,须使系统孤岛运行,此时直接断开pcc,无需添加额外控制策略,继续执行步骤(1)~步骤(3)。
21.mmc-mg系统平滑切换流程图如图4所示。系统孤岛运行时仅投入电压谐波补偿、电压电流双闭环和vsg控制;系统需要并网运行时,在上述控制的基础上开启预同步控制;当达到并网触发条件时,退出预同步控制,同时闭合pcc,然后系统处于并网状态;当接收到离网信号时,直接断开pcc即可。
22.图5是系统孤岛转并网的并网触发条件。根据我国gb/t33592-2017分布式电源并网运行规范控制规范,当系统频率偏差限值为
±
0.2hz,电压偏差为标称电压的
±
7%时,系统可以并网,而本发明设置的并网阈值条件均小于我国标准并网规范。图4中,sinδθ越接近于0,说明pcc两端电压相位差越小;δu与标准电压越接近,系统产生的冲击电流幅值就越小。当图中两个触发条件皆满足要求时,触发pcc进行合闸。图中,|u|表示对输入信号取绝对值,un=311v。
23.mmc-mg系统并离网平滑切换控制框图如图6所示。采集电感电流和电容电压,二者通过功率计算公式得到负载所需的实际有功功率和无功功率。将pe、q、p
ref
、q
ref
参数送入vsg控制中,生成三相电压的参考值u
a/b/c*
,然后通过park变换后作为电压电流双闭环中电压dq轴的给定值。系统经电压谐波补偿δu
a/b/c
及双闭环控制后生成调制信号u'
a/b/c-ref
,再经csp-spwm调制得到驱动信号,控制微源半桥变流器(half-bridge converter,hc)中功率开关管igbt(v1、v2)的开通与关断,进而控制gm的投入与切除。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。