1.本发明涉及一种地铁车辆智能定时同步控制板及控制方法,属于城轨地铁控制技术领域。
背景技术:
2.地铁车辆联挂救援时,需要将一列救援地铁车辆与另一辆被救援地铁车联联挂,联挂的两辆地铁车辆逆变出的ac380v交流电也需并联连接。
3.但由于地铁车辆ac380v交流电由地铁供电接触网(或接触轨)直流电逆变生成。因为地铁车辆交流电源具有特殊性,因此不同地铁车辆逆变出的交流电相位往往不同,而相位不同的地铁车辆交流电源并联在一起,会造成电气系统的严重故障,如:烧损负载设备。所以两列地铁车辆联挂时,必须首先调整两辆地铁车辆ac380v交流电源相位使相位同步,方可使两辆地铁车辆ac380v电源并联联挂。
4.为保证两辆地铁车辆联挂时,两车交流电源能安全并联联挂,需精确控制地铁车辆交流电源相位同步,精确定时的并联接入。而传统的定时控制器无法快速捕捉地铁车辆交流电源相位差和无法快速调整地铁车辆的交流电相位,且传统的定时控制器定时精度不够、智能化程度低、体积大,无法满足现需的控制要求。因此,需要设计一款能够快速捕捉和矫正地铁车辆的交流电相位、智能化程度高,能够精准定时并联联挂接入地铁车辆智能定时同步控制板,以控制两辆地铁车辆交流电源相位同步时,并联接入。
技术实现要素:
5.针对现有技术存在的上述缺陷,本发明提出了一种地铁车辆智能定时同步控制板及控制方法。
6.本发明所述的一种地铁车辆智能定时同步控制板,包括主控制模块、辅助控制模块、时钟模块、直流电源模块以及备用模块,其中:
7.主控制模块,包括主控芯片以及交流接触器km,主控芯片读取时钟模块的数据、采集若干车辆的电压信息、分别与若干辆车辆的逆变器之间通信连接,通过交流接触器km矫正控制若干辆车辆的交流电在相位同步后接入并联;
8.辅助控制模块,包括辅助控制芯片、半导体器件以及加热和降温器件,辅助控制芯片输出pwm信号控制半导体器件对直流电进行斩波,进而控制加热和降温器件的工作效率;
9.时钟模块,包括晶振,晶振向主控芯片提供时钟信号;
10.直流电源模块,为主控制模块、辅助控制模块以及时钟模块进行供电;
11.备用模块,包括时钟芯片及备用电池,在直流电源模块断电时,可由备用电池继续向主控芯片及辅助控制芯片供电,保证时钟芯片代替晶振向主控芯片提供时钟信号。
12.优选地,所述加热和降温器件分别为电阻丝和微小风扇,分别实现对地铁车辆智能定时同步控制板的加热和散热。
13.优选地,所述主控芯片还与板载继电器组合连接,板载继电器组合接收主控芯片
的驱动指令,控制地铁车辆智能同步控制板内电路的开合。
14.优选地,所述半导体器件包括igbt和mos管,分别对流向电阻丝和微小风扇的直流电进行斩波。
15.本发明所述的地铁车辆智能定时同步控制板的控制方法,包括以下步骤:
16.步骤s1:定时设置:将若干辆车辆不同相位下电压互感器的转换时间写入主控芯片程序中常数数组,使用时经过查询数组获得相应数值;
17.步骤s2:进行运算:主控芯片分别计算若干辆车辆三相交流电相位之后时间间隔以及其中一辆车需要延时时间间隔;
18.步骤s3:温度控制:采用抗积分饱和的pid控制算法控制地铁车辆智能定时同步控制板的温度,使之正常运行;
19.步骤s4:实施并联接入、联挂:主控芯片调整若干辆车辆的交流电相位,使若干辆车辆逆变器输出相位同步后,再驱动交流接触器km动作,使得若干辆车辆之间的交流电源并联,进一步实现若干辆车辆的联挂。
20.优选地,所述步骤s2中若干辆车辆三相交流电相位之后时间间隔的计算公式如下所示:
21.δt0=k
as
×
(t
aus
t
avs
t
aws
)/3 k
aad
×
(t
auad
t
avad
t
awad
)3 k
act
×
t
act-[k
bs
×
(t
bus
t
bvs
t
bws
)/3 k
bad
×
(t
buad
t
bvad
t
bwad
)/3 k
bct
×
t
bct
k
ctr
×
t
ctr
];
[0022]
上式是按a车比b车三相交流电相位滞后计算,其中:k
as
为a车同步用接触器动作所需平均时间的校正系数;t
aus
为a车u相同步用接触器动作所需时间;t
avs
为a车v相同步用接触器动作所需时间;t
aws
为a车w相同步用接触器动作所需时间;k
aad
为主控芯片对a车电压互感器输出模拟电压信号的ad转换延时间隔的校正系数;t
auad
为主控芯片对a车u相电压互感器输出的模拟电压信号的ad转换延时间隔;t
avad
为主控芯片对a车v相电压互感器输出的模拟电压信号的ad转换延时间隔;t
awad
为主控芯片对a车w相电压互感器输出的模拟电压信号的ad转换延时间隔;k
act
为主控芯片与a车逆变器通信时的延迟时间校正系数;t
act
为主控芯片与a车逆变器通信时的延迟时间;k
bs
为b车同步用接触器动作所需平均时间校正系数;t
bus
为b车u相同步用接触器动作所需时间校正系数;t
bvs
为b车v相同步用接触器动作所需时间校正系数;t
bws
为b车w相同步用接触器动作所需时间校正系数;k
bad
为主控芯片对b车u相电压互感器输出的模拟电压信号的ad转换延时间隔校正系数;t
buad
为主控芯片对b车u相电压互感器输出的模拟电压信号的ad转换延时间隔;t
bvad
为主控芯片对b车v相电压互感器输出的模拟电压信号的ad转换延时间隔;t
bwad
为主控芯片对b车w相电压互感器输出的模拟电压信号的ad转换延时间隔;k
bct
为主控芯片与b车逆变器通信时的延迟时间校正系数;t
bct
为主控芯片与b车逆变器通信时的延迟时间;k
ctr
为;t
ctr
为主控芯片驱动交流接触器km时的延迟时间间隔。
[0023]
优选地,所述步骤s2中其中一辆车需要延时时间间隔的计算公式如下所示:
[0024]
δtb=δt0 k
t
;
[0025]
上式是按b车计算,其中:δt0为a车比b车三相交流电相位之后时间间隔,k
t
为时间校正系数常数。
[0026]
优选地,所述步骤s3所述pid控制算法的计算公式如下所示:
[0027][0028]
其中:kp为比例系数,ti为积分时间常数,td为微分时间常数。
[0029]
优选地,所述pid控制算法包括以下校正环节:
[0030]
(1)比列环节:成比例反应温度控制系统的温度偏差信号;
[0031]
(2)积分环节:消除温度静差,提高系统的无差度;
[0032]
(3)微分环节:反映温度偏差信号的变化趋势,减少温度调节时间。
[0033]
本发明所述的地铁车辆智能定时同步控制板及控制方法,具有以下有益效果:
[0034]
(1)引入fpga芯片和arm芯片,实现双核控制,定时控制精度高;
[0035]
(2)引入电阻丝和微小风扇,实现对地铁车辆智能定时同步控制板加热控制,促使地铁车辆智能定时同步控制板温度范围较为恒定,能够避免地铁车辆智能定时同步控制板上的芯片发生较大的温漂而造成的定时不准问题;
[0036]
(3)控制方法内引入优化的相位定时差值算法,能够精准实现定时控制两辆地铁车辆交流电并联接入,控制精度很高,保证两车相位同步,避免电气故障的发生。
附图说明
[0037]
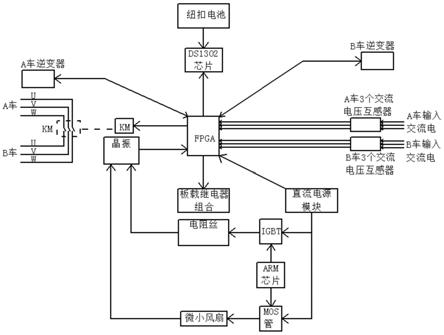
图1是地铁车辆智能定时同步控制板的连接结构示意图。
[0038]
图2是地铁车辆智能定时同步控制板的控制方法的流程框图。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
实施例1:
[0041]
如图1所示,本发明所述的地铁车辆智能定时同步控制板,包括主控制模块、辅助控制模块、时钟模块、直流电源模块以及备用模块,其中:
[0042]
主控制模块,包括主控芯片以及交流接触器km,主控芯片采用fpga芯片,fpga芯片具有编程方便灵活、集成度高、处理速度快、低功耗、高性价比的优点;fpga芯片读取时钟模块的数据、采集若干辆车辆的电压信息、分别与若干辆车辆的逆变器之间通信连接,通过交流接触器km矫正控制不通车辆的交流电在相位同步后接入并联。fpga芯片设置在地铁车辆智能定时同步控制板上,采集其他模块及地铁车辆上的信息,并发送控制指令给其他模块。本实施例以a车、b车两辆地铁车辆为例,a车交流电输出电路并联接入a车的三个电压互感器,a车三个电压互感器输出的模拟信号经过滤波电路等间接输入到fpga芯片的ad输入引脚上,b车交流电接入b车三个电压互感器,b车三个电压互感器输出的模拟电压信号间接输入到fpga芯片的ad输入引脚上;fpga芯片输出引脚间接驱动交流接触器km,矫正控制a车和b车交流电在相位同步后,接入并联。fpga芯片还与a车、b车逆变器进行通信连接,根据检测到的b车逆变器输出的交流电相位,调整a车逆变器输出的交流电相位,使得a车和b车逆变器输出相位同步后,再驱动交流接触器km动作,使得两者交流电源并联,进一步控制两车联
挂。
[0043]
辅助控制模块,包括辅助控制芯片、半导体器件以及加热和降温器件,辅助控制芯片采用arm芯片,arm芯片具有高性能、低功耗、低价格的优点,arm芯片输出pwm信号控制半导体器件对直流电进行斩波,进而控制加热和降温器件的工作效率。半导体器件包括igbt和mos管,加热和降温器件为电阻丝和微小风扇;由于半导体器件易收到温度影响而发生漂移,俗称“温漂”,所以必须保证地铁车辆智能定时同步控制板上的芯片工作于正常范围内,从而保证地铁车辆智能定时同步控制板的正常运行。
[0044]
电阻丝对晶振等元件进行加热,arm芯片输出pwm信号控制igbt对直流电源模块输出的直流电进行斩波,来间接控制电阻丝发热平均供电电压,进而控制电阻丝制热功率,间接控制电阻丝向地铁车辆智能定时同步控制板上芯片的输出热量,时限对fpga芯片的工作环境温度的闭环自动调节;与此同时,arm芯片输出pwm信号控制mos管,对直流电源模块输出的直流电进行斩波,进而控制微小风扇平均输入电压,间接控制微小风扇的出风量,进而控制散热效率,与电阻丝配合使用,实现对fpga芯片环境温度的闭环温度自动调节。
[0045]
时钟模块,包括晶振,晶振向fpga芯片提供时钟信号,即为fpga芯片内部程序运行提供时钟信号,进行累加计时。
[0046]
直流电源模块,为主控制模块、辅助控制模块以及时钟模块进行供电,即为fpga芯片、igbt、mos管、arm芯片供电,保证地铁车辆智能定时同步控制板能够正常运行。
[0047]
备用模块,包括时钟芯片及备用电池,时钟芯片采用ds1302芯片,ds1302芯片具有工作电压宽、精度高的优点;在直流电源模块断电时,可由备用电池继续向fpga芯片及fpga芯片供电,保证ds1302芯片代替晶振向fpga芯片提供时钟信号。备用电池采用纽扣电池,纽扣电池价格低廉、易获得,降低了地铁车辆智能定时同步控制板的制造成本。
[0048]
fpga芯片还与板载继电器组合连接,板载继电器组合接收fpga芯片的驱动指令,在两地铁车辆交流电相位同步时,板载继电器被控制闭合,进而间接控制交流接触器km闭合,控制若干辆车辆的交流电在相位同步后接入并联,增强两地铁车辆交流电同步并联接入的安全性。
[0049]
实施例2:
[0050]
如图2所示,本发明所述的地铁车辆智能定时同步控制板的控制方法,包括以下步骤:
[0051]
步骤s1:定时设置:将若干辆车辆不同相位下电压互感器的转换时间写入主控芯片,即fpga芯片程序中常数数组,使用时经过查询数组获得相应数值。
[0052]
步骤s2:进行运算:主控芯片(fpga芯片)分别计算若干辆车辆三相交流电相位之后时间间隔以及其中一辆车需要延时时间间隔;
[0053]
若干辆车辆三相交流电相位之后时间间隔的计算公式如下所示:
[0054]
δt0=k
as
×
(t
aus
t
avs
t
aws
)/3 k
aad
×
(t
auad
t
aad
t
awad
)3 k
act
×
t
act-[k
bs
×
(t
bus
t
bvs
t
bws
)/3 k
bad
×
(t
buad
t
bvd
t
bwad
)3 k
bct
×
t
bct
k
ctr
×
t
ctr
];
[0055]
上式是按a车比b车三相交流电相位滞后计算,其中:k
as
为a车同步用接触器动作所需平均时间校正系数;t
aus
为a车u相同步用接触器动作所需时间;t
avs
为a车v相同步用接触器动作所需时间;t
aws
为a车w相同步用接触器动作所需时间;k
aad
为fpga芯片对a车电压互感器输出模拟电压信号的ad转换延时间隔校正系数;t
auad
为fpga芯片对a车u相电压互感器输
出的模拟电压信号的ad转换延时间隔;t
avad
为fpga芯片对a车v相电压互感器输出的模拟电压信号的ad转换延时间隔;t
awad
为fpga芯片对a车w相电压互感器输出的模拟电压信号的ad转换延时间隔;;k
act
为fpga芯片与a车逆变器通信时的延迟时间校正系数;t
act
为fpga芯片与a车逆变器通信时的延迟时间;k
bs
为b车同步用接触器动作所需平均时间校正系数;t
bus
为b车u相同步用接触器动作所需时间校正系数;t
bvs
为b车v相同步用接触器动作所需时间校正系数;t
bws
为b车w相同步用接触器动作所需时间校正系数;k
bad
为fpga芯片对b车u相电压互感器输出的模拟电压信号的ad转换延时间隔校正系数;t
buad
为fpga芯片对b车u相电压互感器输出的模拟电压信号的ad转换延时间隔;t
bvad
为fpga芯片对b车v相电压互感器输出的模拟电压信号的ad转换延时间隔;t
bwad
为fpga芯片对b车w相电压互感器输出的模拟电压信号的ad转换延时间隔;k
bct
为fpga芯片与b车逆变器通信时的延迟时间校正系数;t
bct
为fpga芯片与b车逆变器通信时的延迟时间;k
ctr
为;t
ctr
为fpga芯片驱动交流接触器km时的延迟时间间隔。
[0056]
当taus,tavs,taws两两误差绝对值之和≥2.3us时,系数kas取值1.018;当taus,tavs,taws两两误差绝对值之和<2.3us时,系数kas取值0.9956;
[0057]
当tauad,tavad,tawad两两误差绝对值之和≥50ns时,系数kaad取值1.009;当tauad,tavad,tawad两两误差绝对值之和<50ns时,系数kas取值0.9963;
[0058]
当tact≥17ns,系数kact取值1.063;当tact<17ns,系数kact取值0.9976;
[0059]
系数kas取值1.003;
[0060]
当tbuad,tbvad,tbwad两两误差绝对值之和≥32ns时,系数kbad取值1.009;当tbuad,tbvad,tbwad两两误差绝对值之和<32ns时,系数kbad取值0.9981。
[0061]
当tbct≥13ns,系数kbct取值1.026;当tbct<13ns,系数kbct取值0.9983;
[0062]
当tctr≥0.2ns,系数kctr取值1.005;当0.1ns<tbct<0.2ns,系数kbct取值1.003;当tbct≤0.1ns,kbct取值0.998。
[0063]
其中一辆车需要延时时间间隔的计算公式如下所示:
[0064]
δtb=δt0 k
t
;
[0065]
上式是按b车计算,其中:δt0为a车比b车三相交流电相位之后时间间隔,k
t
为时间校正系数常数。
[0066]
步骤s3:温度控制:采用抗积分饱和的pid控制算法控制地铁车辆智能定时同步控制板的温度,使之正常运行;
[0067]
pid控制算法的计算公式如下所示:
[0068][0069]
其中:kp为比例系数,ti为积分时间常数,td为微分时间常数,error(t)为pid控制器给定值与实际输出至之间构成的控制偏差,eror(t)的计算公式如下所示:
[0070]
error(t)=yd(t)-y(t)
[0071]
其中:yd(t)为温度给定值;y(t)为温度实际输出值。
[0072]
步骤s4:实施并联接入、联挂:fpga芯片调整若干辆车辆的交流电相位,使若干辆车辆逆变器输出相位同步后,再驱动交流接触器km动作,使得若干辆车辆之间的交流电源并联,进一步实现若干辆车辆的联挂。
[0073]
pid控制算法包括以下校正环节:
[0074]
(1)比列环节:成比例反应温度控制系统的温度偏差信号;温度偏差信号一旦产生,控制器立即产生控制作用,以减少温度偏差。
[0075]
(2)积分环节:消除温度静差,提高系统的无差度;积分作用的强弱取决于积分时间常数ti,ti越大,积分作用越弱,反之则越强。
[0076]
(3)微分环节:反映温度偏差信号的变化趋势,并能在温度偏差信号变得太大之前,在系统引入一个有效的早期温度修正信号,从而加快系统的动作速度,减少温度调节时间。
[0077]
所谓积分饱和现象是指系统存在一个方向的偏差,pid控制算法的输出由于积分作用的不断累加而加大,从而导致执行机构达到极限位置。若控制其输出u(k)继续增大,执行机构的输出xmax不能继续增大,此时就称作计算机输出控制量超出正常范围而进入饱和区。一旦系统出现反向偏差,控制器输出u(k)就会从饱和区退出。进入饱和区越深则推出饱和区所需时间越长。在这段时间内,执行机构仍停留在极限位置而不能随偏差反向立即做出相应改变,这时系统就像失去控制一样,造成控制系统恶化。这种现象称为积分饱和现象或积分失控现象。
[0078]
作为防止积分饱和的方法之一就是抗积分饱和算法。该方法的思路就是在计算u(k)时,首先判断上一时刻的控制量u(k-1)是否超出限制范围。若u(k-1)>umax,则只累加负偏差,若u(k-1)<umax,则只需累加正偏差。这种算法可以避免控制量长时间停留在饱和区。
[0079]
本发明的有益效果是:本发明所述的地铁车辆智能定时同步控制板能够精准矫正地铁车辆相位并可实现辆车安全并联联挂,同时本发明所述的地铁车辆智能定时同步控制板体积小、智能化程度高、控制精度高。
[0080]
本发明可广泛运用于城轨地铁控制场合。
[0081]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0082]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
