1.本发明涉及半导体制造领域,尤其涉及一种晶圆缺陷扫描方法及系统。
背景技术:
2.随着半导体器件工艺的发展,半导体器件的尺寸不断缩小,晶圆缺陷扫描已经成为提升半导体器件良率一项不可或缺的手段,晶圆缺陷扫描是通过晶圆缺陷扫描机台捕获晶圆表面的缺陷,随着半导体芯片集成度越来越高,晶圆缺陷扫描的难度也越来越大。
3.暗场扫描技术由于其产能、成本和特定层适用性等方面的优势在晶圆缺陷检测领域中被广泛地应用。暗场扫描的原理是利用与检测晶圆平面呈较大倾角的斜入射激光作为光源,通过收集检测光束接触晶圆表面后向多个方向反射得到的散射光信号来判断晶圆表面的某一位置上是否存在缺陷,再以这种方式扫描整个晶圆从而得到晶圆的缺陷分布图。但使用该方法进行晶圆缺陷扫描时,检测光束在扫描过程中会照射到扫描区域边缘的非扫描区域,引入不必要的噪声,进而对晶圆缺陷检测结果的精准度造成影响。
技术实现要素:
4.本发明的目的在于提供一种晶圆缺陷扫描方法及系统,以避免检测光束在扫描过程中照射到检测区边缘的非检测区域,进而提高晶圆缺陷检测的精准度及检测效率。
5.为了达到上述目的,本发明提供了一种晶圆缺陷扫描方法,包括:
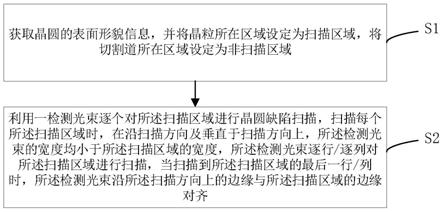
6.获取晶圆的表面形貌信息,并将晶粒所在区域设定为扫描区域,将切割道所在区域设定为非扫描区域;
7.利用一检测光束逐个对所述扫描区域进行缺陷扫描,扫描每个所述扫描区域时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域的宽度,所述检测光束逐行/逐列对所述扫描区域进行扫描,当扫描到所述扫描区域的最后一行/列时,所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。
8.可选的,当所述检测光束扫描到所述扫描区域的最后一行/列之前,判断所述检测光束沿所述扫描方向上的边缘是否会超出所述扫描区域的边缘,若是,则沿背离所述扫描方向的方向移动所述检测光束,直至所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。
9.可选的,对所述扫描区域进行缺陷扫描的步骤还包括:
10.扫描所述扫描区域的最后一行/列时,若最后一行/列的所述检测光束的扫描范围与倒数第二行/列的所述检测光束的扫描范围具有重叠时,抛弃重叠的扫描范围上的缺陷扫描结果。
11.可选的,每个所述扫描区域均完成缺陷扫描之后,还包括:
12.将每个所述扫描区域的缺陷扫描结果与标准结果进行对比,若所述扫描区域内某一位置上的灰度值与所述标准结果的对应位置的灰度值之差大于设定阈值,则对该位置进行缺陷标记。
13.可选的,所述标准结果的每个位置上的灰度值为与所述扫描区域相邻的多个所述扫描区域内同一位置上的灰度值的平均值。
14.可选的,获取所述晶圆的表面形貌信息的步骤包括:
15.在所述晶圆表面建立以所述晶粒相互垂直的两边为坐标轴方向的坐标系;
16.获取所述晶圆表面的所述晶粒和所述切割道的分布情况及尺寸数据。
17.可选的,所述晶圆上的表面形貌信息通过光学电子显微镜、扫描电子显微镜或聚焦粒子束扫描设备获取。
18.可选的,通过光阑调整所述检测光束的沿扫描方向上的宽度。
19.基于同一种发明构思,本发明还提供一种晶圆缺陷扫描系统,包括:
20.形貌信息获取模块,用于获取晶圆的表面形貌信息,并将晶粒所在区域设定为扫描区域,将切割道所在区域设定为非扫描区域;
21.光源模块,用于提供检测光束,并利用所述检测光束逐个对所述扫描区域进行缺陷扫描,扫描每个所述扫描区域时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度小于所述扫描区域的宽度,所述检测光束逐行/逐列对所述扫描区域进行扫描,当扫描到所述扫描区域的最后一行/列时,所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。
22.可选的,所述晶圆缺陷扫描系统还包括:
23.晶圆缺陷对比模块,用于将每个所述扫描区域的缺陷扫描结果与标准结果进行对比,若所述扫描区域内某一位置上的灰度值与所述标准结果的对应位置的灰度值之差大于设定阈值,则对该位置进行缺陷标记,其中,所述标准结果的每个位置上的灰度值为与所述扫描区域相邻的多个所述扫描区域内同一位置上的灰度值的平均值。
24.本发明提供一种晶圆缺陷扫描方法,包括:获取晶圆的表面形貌信息,并将晶粒所在区域设定为扫描区域,将切割道所在区域设定为非扫描区域;利用一检测光束逐个对所述扫描区域进行缺陷扫描,扫描每个所述扫描区域时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域的宽度,所述检测光束逐行/逐列对所述扫描区域进行扫描,当所述检测光束扫描到所述扫描区域的最后一行/列之前,判断所述检测光束沿所述扫描方向上是否会超出所述扫描区域的边缘,若是,则沿背离所述扫描方向的方向移动所述检测光束,直至所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。改变最后以行/列的所述检测光束的位置,从根本上避免了所述检测光束照射到所述非扫描区域,进而避免所述非扫描区域的散射光噪声的引入对晶圆缺陷扫描结果的影响,提高所述晶圆缺陷扫描结果的精准性;同时也从根本上避免当所述切割道图形存在类似光栅的重复结构时,导致所述晶圆缺陷扫描结果中产生重复性缺陷,提高所述晶圆缺陷检测的检测效率。相应的,本发明还提供了一种晶圆缺陷扫描系统。
附图说明
25.图1为晶圆的结构示意图;
26.图2为晶圆缺陷扫描方法扫描过程中检测光束与所述晶圆之间的位置示意图;
27.图3为不同切割道图形造成的散射光噪声信号的示意图;
28.图4为包含切割道散射光噪声信号的缺陷检测结果;
29.图5为本发明实施例提供的一种晶圆缺陷扫描系统的结构图;
30.图6为本发明实施例提供的一种晶圆缺陷扫描方法的流程图;
31.图7为本发明实施例提供的一种晶圆缺陷扫描方法的晶圆结构示意图;
32.图8为本发明实施例提供的一种晶圆缺陷扫方法扫描过程中检测光束与所述晶圆之间的位置示意图;
33.其中,附图说明为:
34.100、200-晶圆;104、204-非扫描区域;106、206-扫描区域;108-检测光束;208a-第一检测光束;208b-第二检测光束;208c-第三检测光束;300-缺陷;302-光源模块;303-光阑;304-晶圆缺陷对比模块。
具体实施方式
35.图1为晶圆的结构示意图,如图1所示,晶圆100上的图形可以大致分为晶粒与切割道两部分,由于构成芯片功能的部分均分布在所述晶粒的内部,而所述切割道内只会放置一些用于测量与对准的图形,并且在芯片的封装过程中,所述切割道会被视为用于切割的无用部分以分离所述晶粒,所以晶圆缺陷扫描一般只关心所述晶圆100上的所述晶粒部分的缺陷情况,因此在晶圆缺陷扫描的程式中会定义晶粒为扫描区域106,切割道为非扫描区域104,并且在处理和计算光学信号时只关心所述晶粒的光学信号。
36.图2为晶圆缺陷扫描方法扫描过程中检测光束与所述晶圆之间的位置示意图,如图2所示,箭头所指的方向为所述扫描方向,所述检测光束沿所述扫描方向逐列的扫描所述扫描区域106,在实际检测的过程中,检测光束108的扫描轨迹只需覆盖所述扫描区域106,但由于检测光束108在沿所述扫描方向上具有一定的宽度,且所述扫描区域106沿所述扫描方向上的宽度并不一定为所述检测光束108沿所述扫描方向上的宽度的整倍数,导致扫描过程中所述非扫描区域104内的所述切割道也会被所述检测光束108照射到,来自所述非扫描区域104上的图形所反射的散射光信号会被接收到晶圆缺陷扫描结果中。与此同时,所述非检测区域104上的图形与所述检测区域106内的图形具有较大的差异,导致得到的晶圆缺陷扫描结果与实际情况必然存在较大的差异,进而导致缺陷检测精度下降。
37.图3为不同切割道图形造成的散射光噪声信号的示意图,如图3所示,当所述切割道图形存在类似光栅的重复结构时,晶圆缺陷扫描得到的灰度图像对应所述切割道的位置上会产生由散射光信号形成的干涉光斑,所述切割道的图形不同所得到的干涉光斑也不相同,但由于所述切割道的图形具有重复结构,所述切割道形成的散射光信号的强度一般会高于晶粒图形形成的光信号的强度,使晶圆缺陷扫描得到的灰度图像中所述切割道的灰度值与所述晶粒的灰度值产生较大差异。
38.图4为包含切割道散射光噪声信号的晶圆缺陷检测结果,如图4所示,标记所示为所述切割道位置在晶圆缺陷扫描结果中产生的缺陷标记,所述切割道产生的缺陷标记具有重复性的特点(图4中的圆圈内的黑点)。这类缺陷标记在实际检测过程中是不希望被看到的,因为重复性的缺陷标记是系统性的工艺问题或者光罩的缺陷问题所导致的,当晶圆缺陷扫描结果中出现重复性的缺陷标记时,工作人员需要做额外的复检工作来确定是否为工艺问题,所述切割道的散射光信号引起的重复性的缺陷标记属于一种误检情况,增加了工作人员的不必要的工作量。为了避免这种误检情况的出现,通常只能依靠增大在灰度图像
中所述切割道对应的灰度值与所述晶粒对应的灰度值之间的差值或缩小扫描区域106,然而过度地提高所述差值会降低晶圆缺陷扫描结果的灵敏度,缩小扫描区域106则会增加所述晶粒102边缘位置漏检的风险。
39.下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
40.在下文中,术语“第一”“第二”等用于在类似要素之间进行区分,且未必是用于描述特定次序或时间顺序。要理解,在适当情况下,如此使用的这些术语可替换。类似的,如果本文所述的方法包括一系列步骤,且本文所呈现的这些步骤并非必须是可执行这些步骤的唯一顺序,且一些所述的步骤可被省略和/或一些文本未描述的其它步骤可被添加到该方法。
41.图5为本实施例提供的一种晶圆缺陷扫描系统,如图5所示,所述晶圆缺陷检测系统包括:形貌信息获取模块、光源模块302、晶圆缺陷对比模块304以及光阑303。
42.其中,所述形貌信息获取模块,用于获取晶圆200的表面形貌信息,并将晶粒所在区域设定为扫描区域,将切割道所在区域设定为非扫描区域;
43.所述光源模块302,用于提供检测光束,并利用所述检测光束逐个对所述扫描区域进行晶圆缺陷扫描,扫描每个所述扫描区域时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域的宽度,所述检测光束逐行/逐列对所述扫描区域进行扫描,当扫描到所述扫描区域的最后一行/列时,所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。
44.在所述光源模块302上加装所述光阑303,可以调节所述检测光束的宽度。
45.继续参阅图5,当所述晶圆缺陷检测系统对所述晶圆200进行缺陷检测时,所述光源模块302向所述晶圆200发出所述检测光束,所述检测光束照射至所述晶圆200的表面,若所述晶圆200的表面具有缺陷,则所述检测光束在所述缺陷处产生散射,所述检测光束逐个扫描所述晶圆的所有扫描区域,所述晶圆缺陷对比模块304收集所述散射光,将所述散射光信号转化为电信号,并进一步生成灰度图像,这样就将所述晶圆200表面的缺陷信息转化为像素灰度值记录下来。由于所述检测光束在所述缺陷处的形成的散射光的散射方向与所述检测光束在非缺陷处的表面上形成的散射光的散射方向是不同的,所述晶圆缺陷对比模块304的固定位置上所收集到的散射光的强度也不同,进而使所述晶圆缺陷对比模块304产生的所述表面灰度图像在所述缺陷处于非缺陷处上的像素的灰度值具有差异,便于进行下一步的比较。
46.这种工作模式被称为暗场扫描(dark-field inspection),其对于检测所述晶圆200表面的颗粒与表面缺陷非常灵敏。为了增大探测的灵敏度,所述晶圆缺陷对比模块304可以采用环状探测器。
47.进一步的,所述晶圆缺陷对比模块304将每个所述扫描区域的晶圆缺陷扫描结果与标准结果进行对比,若所述扫描区域内某一位置上的灰度值于所述标准结果上同一位置的灰度值之差大于设定阈值,则对该位置进行缺陷标记,其中,所述标准结果的每个位置上的灰度值为与所述扫描区域相邻的多个所述扫描区域内同一位置上的灰度值的平均值。
48.图6为本实施例提供的一种晶圆缺陷扫描方法的流程图,如图6所示,本发明提供
了一种晶圆缺陷扫描方法,包括:
49.步骤s01:获取晶圆的表面形貌信息,并将晶粒所在区域设定为扫描区域,将切割道所在区域设定为非扫描区域;
50.步骤s02:利用一检测光束逐个对所述扫描区域进行晶圆缺陷扫描,扫描每个所述扫描区域时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域的宽度,所述检测光束逐行/逐列对所述扫描区域进行扫描,当扫描到所述扫描区域的最后一行/列时,所述检测光束沿所述扫描方向上的边缘与所述扫描区域的边缘对齐。
51.下面结合附图对本实施例提供的一种晶圆缺陷扫描方法进行更详细的描述,其中图示了本发明的优选实施例。
52.图7为本实施例提供的一种晶圆缺陷扫描方法的晶圆结构示意图,如图7所示,晶圆200上的图形可以大致分为晶粒与切割道两部分。
53.执行步骤s01,在所述晶圆200表面建立以所述晶粒相互垂直的两边为坐标轴方向的坐标系,并扫描所述晶圆200以获取所述晶圆200的表面形貌信息。
54.所述晶圆200上的表面形貌信息包括:所述晶圆200表面的所述晶粒和所述切割道的分布情况及尺寸数据。所述晶圆200上的表面形貌信息一般可以通过光学电子显微镜、扫描电子显微镜、聚焦粒子束扫描设备获取。理论上所述晶圆200上的表面形貌信息与工艺过程中所使用的光罩的信息保持一致,但在实际工艺过程中,所述光罩的制作及保存过程中均可能引入对器件制作产生影响的外界因素,导致所述晶圆200上的表面形貌信息与所述光罩的理想信息不一致,因此在进行晶圆缺陷扫描前需要对所述晶圆200的表面形貌信息进行进一步的扫描,消除由于所述晶圆200的个体差异带来的误差,并根据扫描到的表面形貌信息将具有重复的所述晶粒所在的区域设定为扫描区域206,将所述切割道所在的区域设定为非扫描区域204。
55.图8为本实施例提供的一种晶圆缺陷扫描方法扫描过程中检测光束与所述晶圆之间的位置示意图,如图8所示,在步骤s02中,利用一检测光束逐个对所述扫描区域206进行晶圆缺陷扫描,扫描每个所述扫描区域206时所述检测光束逐行/逐列对所述扫描区域206进行扫描,当所述检测光束扫描到所述扫描区域206的最后一行/列之前,判断所述检测光束沿所述扫描方向上的边缘是否会超出所述扫描区域206的边缘,若是,则沿背离所述扫描方向的方向移动所述检测光束,直至所述检测光束沿所述扫描方向上的边缘与所述扫描区域206的边缘对齐。
56.其中,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域的宽度,以避免所述检测光束超出所述扫描范围206。
57.图8具体示例了所述检测光束沿所述扫描方向逐行扫描的过程,图中箭头所指的方向为所述扫描方向,应当理解的是,所述扫描方向并不是所述检测光束扫描时的移动方向,而是当所述检测光束完成一行扫描后向下一待扫描行移动时的方向。图8中所述检测光束之间呈阶梯状仅为了便于观察所述检测光束逐行/列扫描的过程,在实际扫描过程中所述检测光束的扫描时每行扫描起点位于同一水平线上,且图中的第一检测光束208a、第二检测光束208b及第三检测光束208c为同一束所述检测光束不同时刻所处的位置示意图。
58.下面将结合图2详细描述所述检测光束的扫描过程。
59.从所述扫描区域206的一端开始逐行/列进行扫描,以靠近所述扫描方向的边缘为
所述检测光束的前端,远离所述扫描方向的边缘为所述检测光束的后端。所述第一检测光束208a的前端与所述扫描区域206的一端重合,所述第二检测光束208b的前端与所述第一检测光束208a的后端重合,以此类推,直至所述检测光束扫描到所述扫描区域206的最后一行/列。当所述第三检测光束208c扫描到所述扫描区域206的最后一行/列之前,判断所述第三检测光束208c沿所述扫描方向上的边缘是否会超出所述扫描区域206的边缘,若是,则沿背离所述扫描方向的方向移动所述第三检测光束208c,使所述第三检测光束208c的后端与所述扫描区域206的边缘对齐,避免所述检测光束照到所述非扫描区域204,以避免所述切割道散射光信号的引入。
60.若所述扫描区域206的宽度是所述检测光束沿所述扫描方向上的宽度的整倍数,则所述第三检测光束208c的后端与所述扫描区域206的边缘自动对齐,此时不需要移动所述第三检测光束208c。
61.进一步的,所述检测光束的宽度可以通过光阑进行调节,根据晶圆200的表面形貌信息,调整所述光阑,使所述检测光束在沿所述扫描方向上与垂直于所述扫描方向上的宽度小于均所述扫描区域206的宽度,以满足不同所述晶圆200上不同大小的晶粒对检测光束的需求。
62.每个所述扫描区域均完成晶圆缺陷扫描之后,还包括:将扫描过程中收集到的光信号转变为灰度图像,得到的灰度图像即为晶圆缺陷扫描结果,将每个所述扫描区域206的晶圆缺陷扫描结果与标准结果进行对比,若所述扫描区域206内某一位置上的灰度值与所述标准结果的对应位置的灰度值之差大于设定阈值,则对该位置进行缺陷标记。
63.其中,所述标准结果的每个位置上的灰度值为与所述扫描区域相邻的多个所述扫描区域内同一位置上的灰度值的平均值。在计算所述标准结果时,参与计算的所述扫描区域越多,取得的平均值越接近理想值,晶圆缺陷检测的效果越好,但计算量较大。优选的可以计算所述晶圆200上所述扫描区域相邻八个所述扫描区域同一位置上灰度值的平均值,以组成所述标准结果。
64.在其它可选实施例中,可以定义一标准晶圆,将所述标准晶圆上各扫描区域同一位置上灰度值的平均值作为标准结果,但所述标准晶圆不能考虑所述晶圆200的个体差异,容易出现误检的现象。
65.进一步的,当所述检测光束扫描所述扫描区域206的最后一行/列时,最后一行/列的所述检测光束的扫描范围与倒数第二行/列的所述检测光束的扫描范围具有重叠时,抛弃重叠的扫描范围上的晶圆缺陷扫描结果,避免对同一位置进行重复标记,影响晶圆缺陷检测的结果。
66.本发明提供一种晶圆缺陷扫描方法及系统,包括:获取晶圆200的表面形貌信息,并将晶粒所在区域设定为扫描区域206,将切割道所在区域设定为非扫描区域204;利用一检测光束逐个对所述扫描区域206进行晶圆缺陷扫描,扫描每个所述扫描区域206时,在沿扫描方向及垂直于扫描方向上,所述检测光束的宽度均小于所述扫描区域206的宽度,所述检测光束逐行/逐列对所述扫描区域206进行扫描,当所述检测光束扫描到所述扫描区域206的最后一行/列之前,判断所述检测光束沿所述扫描方向上的边缘是否会超出所述扫描区域206的边缘,若是,则沿背离所述扫描方向的方向移动所述检测光束,直至所述检测光束沿所述扫描方向上的边缘与所述扫描区域206的边缘对齐。改变最后以行/列的所述检测
光束的位置,从根本上避免了所述检测光束照射到所述非扫描区域204,进而避免所述非扫描区域204的散射光噪声的引入对晶圆缺陷扫描结果的影响,提高所述晶圆缺陷扫描结果的精准性;同时也从根本上避免当所述切割道图形存在类似光栅的重复结构时,导致所述晶圆缺陷扫描结果中产生重复性缺陷,提高所述晶圆缺陷检测的检测效率。
67.上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
