1.本发明属于杀虫技术领域,具体涉及一种智能化的榕树虫害多角度杀虫喷洒装置。
背景技术:
2.随着杀虫技术的不断推进,越来越多的榕树需要用到杀虫装置,榕树是常绿乔木,树高达20~30m,胸径达2m,树的主要害虫分为食叶性害虫和刺入式害虫,刺入式害虫吸吮树芽和树干中营养,甚至能诱发煤烟病,食叶性害虫使叶片卷筒并藏在里面吸吮叶汁,影响生长和美观,对于这些虫子就需要进行杀虫工作。
3.现有的杀虫装置无法根据榕树高度和榕树叶分布情况进行智能化的杀虫工作,不利于杀虫效果,而且对杀虫剂造成严重浪费,无法物尽其用,该现象成为本领域人员亟待解决的问题。
技术实现要素:
4.本发明的目的在于针对现有的集材装置一种智能化的榕树虫害多角度杀虫喷洒装置,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:一种智能化的榕树虫害多角度杀虫喷洒装置,包括杀虫装置和智能杀虫系统,其特征在于:所述杀虫装置设置有若干且围绕榕树周围,所述杀虫装置包括底座,所述底座上方固定有滑轨,所述滑轨上方滑动连接有气泵,所述气泵下方管道连接有伸缩杆,所述伸缩杆底端与底座固定连接,所述伸缩杆左侧固定安装有安置板,所述安置板左侧固定安装有杀虫机构,所述气泵前侧固定安装有扫描仪,所述扫描仪内部设置有高度识别模块,所述底座右侧固定安装有液压泵,所述扫描仪与手机端电连接,所述液压泵与外部杀虫剂管道连接,所述液压泵与杀虫机构管道连接,所述智能杀虫系统分别与外部电源、扫描仪、高度识别模块、气泵、液压泵、杀虫机构电连接。
6.本发明进一步说明,所述杀虫机构包括支撑架,所述支撑架与安置板固定连接,所述支撑架中间轴承连接有齿轮传动机构,所述齿轮传送机构下方固定连接有电机,所述齿轮传动机构上方固定连接有转向器,所述转向器与支撑架轴承连接,所述转向器左侧固定安装有电控阀,所述电控阀左侧管道连接有喷头,所述喷头与液压泵管道连接,所述智能杀虫系统分别与电机、转向器、电控阀电连接。
7.本发明进一步说明,所述智能杀虫系统包括检测模块、处理模块、数据传输模块、数据接收模块、计算模块和控制模块,所述检测模块分别与扫描仪、高度识别模块、数据传输模块电连接,所述数据接收模块分别与计算模块、数据传输模块电连接,所述计算模块与控制模块电连接,所述检测模块与手机端电连接,所述控制模块与液压泵、电机、转向器、电控阀电连接;
8.所述检测模块用于通过扫描仪对榕树表面进行扫描,将扫描后的图像进行分析,从而判断出榕树的树叶分布情况,并使高度识别模块根据扫描仪从初始位置向上移动时的
上升高度,从而判断出喷洒杀虫剂时的位置高度,从而对数据进行收集,所述处理模块用于根据检测得出的数据对该装置进行辅助控制,所述数据传输模块用于将检测到的数据传输出去,所述数据接收模块用于对传输出来的数据进行接收,所述计算模块用于通过接收到的数据进行自动计算得出结果,所述控制模块用于根据计算得出的结果分别对液压泵、电机、转向器、电控阀进行控制。
9.本发明进一步说明,所述处理模块包括数据收集模块、换算模块和驱动模块,所述数据收集模块与检测模块电连接,所述数据收集模块与换算模块电连接,所述换算模块与驱动模块电连接,所述驱动模块分别与转向器、液压泵、电控阀、气泵电连接;
10.所述数据收集模块用于根据检测模块检测出的树叶分布情况和杀虫时的位置高度,对该数据进行收集,所述换算模块用于根据收集的数据进行换算,得出后续对结构的驱动数据,所述驱动模块用于根据换算得出的结果对转向器、液压泵、电控阀、气泵进行控制。
11.本发明进一步说明,所述智能杀虫系统包括以下运行步骤:
12.s1、操作人员通过外部电源驱动智能杀虫机构运行,智能杀虫系统通过电驱动控制气泵运行,气泵对伸缩杆内部注入气体,伸缩杆伸长,带动气泵沿滑轨向上移动,带动安置板向上移动,从而带动杀虫机构向上移动,同时带动扫描仪向上移动,从而使杀虫机构的所处位置高度发生变化,同时通过电驱动控制扫描仪和高度识别模块运行;
13.s2、扫描仪对榕树表面进行扫描,将扫描后的图像进行分析,从而判断出榕树的树叶分布情况,其中,s为扫描仪扫描到的树叶分布情况,s
叶
为扫描仪扫描区域树叶分布的总面积大小,s
扫
为扫描仪扫描区域的总面积大小,s
系
为树叶分布情况系数,高度识别模块根据扫描仪从初始位置向上移动时的上升高度,从而判断出杀虫机构的位置高度,h为杀虫机构杀虫时的位置高度,并将两个数据传输进数据传输模块和数据收集模块内;
14.s3、数据传输模块再将数据传输出去,传输出去的数据被数据接收模块所接收,接收到的数据通过电传输从数据接收模块传递到计算模块中,计算模块对得到的数据进行自动计算得出结果,并将结果输入进控制模块中;
15.s4、杀虫工作开始,控制模块控制液压泵和电机运行,液压泵将杀虫剂输入到电控阀内,再注入到喷头内,最后从喷头喷出对榕树进行杀虫工作,电机顺逆交替转动,带动齿轮传动机构顺逆交替转动,齿轮传动机构带动转向器转动,带动电控阀转动,从而带动喷头转动,从而对喷头进行横向角度调节工作,并根据杀虫机构杀虫时的位置高度改变液压泵的杀虫剂排放量,使喷头喷出的杀虫剂量发生改变,同时根据杀虫机构杀虫时的位置高度改变电机角度调节幅度,改变喷头左右摆动的幅度;
16.s5、控制模块根据杀虫机构杀虫时的位置高度改变电机顺逆交替转动的速度,从而改变喷头左右摆动时的摆动速度,同时控制电机摆动过程中每摆动十度停留一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短;
17.s6、同时数据收集模块对数据进行收集,并将数据传输到换算模块内,换算模块对数据进行换算得到结果,并将结果输入到驱动模块中,当杀虫机构杀虫时的位置高度大于系统设定值时进入s7,当杀虫机构杀虫时的位置高度小于二米时进入s8,反之进入s10;
18.s7、驱动模块控制转向器、电控阀和液压泵运行模式发生改变,转向器自身转动,
带动喷头对榕树进行上下摆动式喷洒杀虫剂工作,并根据树叶分布情况改变喷头上下摆动时的速度,同时控制电控阀使喷射的杀虫剂为水柱式,并根据树叶分布情况改变液压泵排放杀虫剂的力度,从而改变喷射的力度,之后进入s10;
19.s8、驱动模块通过电驱动控制电控阀、液压泵和气泵运行模式发生改变,控制电控阀使喷射的杀虫剂为水柱式,液压泵最大功率运行,喷射强度最大化,之后液压泵正常功率运行,并根据杀虫机构杀虫时的位置高度控制最大功率运行的时间,从而改变最大强度喷射的喷射时间,同时控制气泵使伸缩杆每伸长十厘米停一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,当树叶分布情况小于系统设定值后进入s9,反之进入s10;
20.s9、驱动模块通过电驱动控制智能杀虫系统停止运行,使该装置各结构停止运行,同时发出树叶分布情况的数据到手机端;
21.s10、纺织布烘干完毕后,操作人员关闭控制面板,智能杀虫系统停止运行,如继续进行下一次烘干工作则重复s1至s9。
22.本发明进一步说明,所述s1至s4中,通过扫描仪对榕树表面进行扫描,将扫描后的图像进行分析,高度识别模块根据扫描仪从初始位置向上移动时的上升高度,从而判断出杀虫机构的位置高度,控制模块控制液压泵和电机运行,当20m《h≤30m时,表示杀虫机构所处位置高度较高,这时控制模块控制液压泵的杀虫剂排放量较多,使喷头喷出的杀虫剂量较多,同时控制电机角度调节幅度较小,使喷头左右摆动的幅度较小,当10m《h≤20m时,表示杀虫机构所处位置高度较中间,这时控制模块控制液压泵的杀虫剂排放量较正常,使喷头喷出的杀虫剂量较正常,同时控制电机角度调节幅度较正常,使喷头左右摆动的幅度较正常,当0m《h≤10m时,表示杀虫机构所处位置高度较低,这时控制模块控制液压泵的杀虫剂排放量较少,使喷头喷出的杀虫剂量较少,同时控制电机角度调节幅度较大,使喷头左右摆动的幅度较大。
23.本发明进一步说明,所述s5中,控制模块根据杀虫机构杀虫时的位置高度改变电机顺逆交替转动的速度,从而改变喷头左右摆动时的摆动速度,同时控制电机摆动过程中每摆动十度停留一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,当20m《h≤30m时,表示杀虫机构所处位置高度较高,这时控制模块控制电机顺逆交替转动的速度较慢,使喷头左右摆动时的摆动速度较慢,同时控制电机摆动过程中每摆动十度停留的时间较长,使喷头左右摆动时停留的时间较长,当10m《h≤20m时,表示杀虫机构所处位置高度较中间,这时控制模块控制电机顺逆交替转动的速度较正常,使喷头左右摆动时的摆动速度较正常,同时控制电机摆动过程中每摆动十度停留的时间较正常,使喷头左右摆动时停留的时间较正常,当0m《h≤10m时,表示杀虫机构所处位置高度较低,这时控制模块控制电机顺逆交替转动的速度较快,使喷头左右摆动时的摆动速度较快,同时控制电机摆动过程中每摆动十度停留的时间较短,使喷头左右摆动时停留的时间较短。
24.本发明进一步说明,所述s7中,当h>h
设
时,h
设
为系统设定的杀虫机构的位置高度,这时榕树叶浓密程度极高,叶子分布极为密集,扫描仪扫描出的图像不准确,s丿=s h*s
系
,其中,s丿为榕树叶实际分布情况,s
系
为单个单位的杀虫机构位置高度下榕树叶的相对分布情况,驱动模块控制转向器、电控阀和液压泵运行模式发生改变,转向器自身转动,带动喷头对榕树进行上下摆动式喷洒杀虫剂工作,并根据树叶分布情况改变喷头上下摆动时的速度,同时控制电控阀使喷射的杀虫剂为水柱式,并根据树叶分布情况改变液压泵排放杀虫
剂的力度,从而改变喷射的力度,当s丿越大时,喷头上下摆动时的速度越慢,喷头喷出杀虫剂水柱的力度越大。
25.本发明进一步说明,所述s8中,当h《2m时,这时扫描仪位于树干部分,扫描仪扫描出的树叶分布情况为零,驱动模块通过电驱动控制电控阀、液压泵和气泵运行模式发生改变,控制电控阀使喷射的杀虫剂为水柱式,液压泵最大功率运行,喷射强度最大化,之后液压泵正常功率运行,并根据杀虫机构杀虫时的位置高度控制最大功率运行的时间,从而改变最大强度喷射的喷射时间,同时控制气泵使伸缩杆每伸长十厘米停一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,t
停
=h*t
比
,其中,t
喷
为杀虫剂最大强度喷射的喷射时间,t
总
为杀虫剂最大强度喷射的最长喷射时间,t
系
为单个单位的杀虫机构杀虫时的位置高度下杀虫剂最大强度喷射的喷射时间,t
停
为气泵使伸缩杆每伸长十厘米停留的时间长短,t
比
为单个单位的杀虫机构杀虫时的位置高度下气泵使伸缩杆每伸长十厘米停留的时间长短,当杀虫机构杀虫时的位置高度越往上升,杀虫剂最大强度喷射的喷射时间越短,气泵使伸缩杆每伸长十厘米停留的时间越长,杀虫机构杀虫时的位置高度越往上升,使杀虫剂最大强度喷射的喷射时间越短,一方面能够对榕树内整体树干进行有效杀虫,一方面防止杀虫剂持续大功率喷射导致杀虫剂被过度浪费,停留的时间越长,越往上越接近树叶从而避免树叶被大功率冲击到影响树叶健康。
26.本发明进一步说明,所述s9中,当杀虫机构上升到树顶位置后,这时扫描仪扫描出的s《s
设
时,s
设
为系统设定的榕树叶分别情况,表示树木表面的树叶极为稀疏,榕树即将死亡,驱动模块通过电驱动控制智能杀虫系统停止运行,使该装置各结构停止运行,同时发出树叶分布情况的数据到手机端,用于提醒管理人员知晓榕树的健康情况,使管理人员能够对即将死亡的榕树进行针对性救治工作。
27.与现有技术相比,本发明所达到的有益效果是:本发明,采用智能杀虫系统,根据树叶分布情况和杀虫时的位置高度控制杀虫机构和液压泵运行模式,实现智能化是杀虫工作,提高杀虫效果。
附图说明
28.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
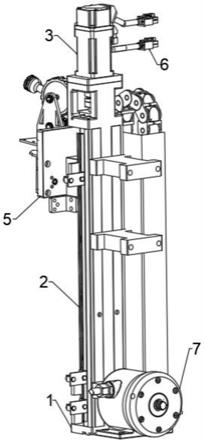
29.图1是本发明的整体结构示意图;
30.图2是本发明的气泵结构示意图;
31.图3是本发明的杀虫机构结构示意图;
32.图4是本发明的转向器结构示意图;
33.图5是本发明的智能杀虫系统流程示意图;
34.图中:1、底座;2、滑轨;3、气泵;4、伸缩杆;5、安置板;6、扫描仪;7、液压泵;8、支撑架;9、电机;10、转向器;11、电控阀;12、喷头。
具体实施方式
35.以下结合较佳实施例及其附图对本发明技术方案作进一步非限制性的详细说明。
显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参阅图1-5,本发明提供技术方案:一种智能化的榕树虫害多角度杀虫喷洒装置,包括杀虫装置和智能杀虫系统,杀虫装置设置有若干且围绕榕树周围,杀虫装置包括底座1,底座1上方固定有滑轨2,滑轨2上方滑动连接有气泵3,气泵3下方管道连接有伸缩杆4,伸缩杆4底端与底座1固定连接,伸缩杆4左侧固定安装有安置板5,安置板5左侧固定安装有杀虫机构,气泵3前侧固定安装有扫描仪6,扫描仪6内部设置有高度识别模块,底座1右侧固定安装有液压泵7,扫描仪6与手机端电连接,液压泵7与外部杀虫剂管道连接,液压泵7与杀虫机构管道连接,智能杀虫系统分别与外部电源、扫描仪6、高度识别模块、气泵3、液压泵7、杀虫机构电连接,操作人员将底座1固定在榕树周围,这时通过外部电源驱动智能杀虫机构运行,智能杀虫系统通过电驱动控制气泵3运行,气泵3对伸缩杆4内部注入气体,伸缩杆4伸长,带动气泵3沿滑轨2向上移动,带动安置板5向上移动,从而带动杀虫机构向上移动,同时带动扫描仪6向上移动,从而使杀虫机构的所处位置高度发生变化,同时通过电驱动控制扫描仪6和高度识别模块运行,扫描仪6对榕树表面进行扫描,将扫描后的图像进行分析,从而判断出榕树的树叶分布情况,高度识别模块根据扫描仪6从初始位置向上移动时的上升高度,从而判断出杀虫机构的位置高度,同时通过电驱动控制液压泵7运行,液压泵7从外部抽取杀虫剂后通过管道注入进杀虫机构内,杀虫机构对榕树进行杀虫工作,并根据树叶分布情况和杀虫时的位置高度控制杀虫机构和液压泵7运行模式,实现智能化是杀虫工作,提高杀虫效果;
37.杀虫机构包括支撑架8,支撑架8与安置板5固定连接,支撑架8中间轴承连接有齿轮传动机构,齿轮传送机构下方固定连接有电机9,齿轮传动机构上方固定连接有转向器10,转向器10与支撑架8轴承连接,转向器10左侧固定安装有电控阀11,电控阀11左侧管道连接有喷头12,喷头12与液压泵7管道连接,智能杀虫系统分别与电机9、转向器10、电控阀11电连接,通过上述步骤,智能杀虫系统运行,液压泵7将杀虫剂输入到电控阀11内,再注入到喷头12内,最后从喷头12喷出对榕树进行杀虫工作,通过电驱动控制电机9运行,电机9带动齿轮传动机构运行,齿轮传动机构带动转向器10转动,带动电控阀11转动,从而带动喷头12转动,从而对喷头12进行横向角度调节工作,对榕树进行左右喷洒工作,同时通过电驱动控制转向器10自身转动,带动喷头12对榕树进行上下摆动式喷洒杀虫剂工作,实现全方位多角度杀虫调节工作,同时通过电驱动控制电控阀11运行,电控阀11用于对杀虫剂的喷洒方式进行控制;
38.智能杀虫系统包括检测模块、处理模块、数据传输模块、数据接收模块、计算模块和控制模块,检测模块分别与扫描仪6、高度识别模块、数据传输模块电连接,数据接收模块分别与计算模块、数据传输模块电连接,计算模块与控制模块电连接,检测模块与手机端电连接,控制模块与液压泵7、电机9、转向器10、电控阀11电连接;
39.检测模块用于通过扫描仪6对榕树表面进行扫描,将扫描后的图像进行分析,从而判断出榕树的树叶分布情况,并使高度识别模块根据扫描仪6从初始位置向上移动时的上升高度,从而判断出喷洒杀虫剂时的位置高度,从而对数据进行收集,处理模块用于根据检测得出的数据对该装置进行辅助控制,数据传输模块用于将检测到的数据传输出去,数据
接收模块用于对传输出来的数据进行接收,计算模块用于通过接收到的数据进行自动计算得出结果,控制模块用于根据计算得出的结果分别对液压泵7、电机9、转向器10、电控阀11进行控制;
40.处理模块包括数据收集模块、换算模块和驱动模块,数据收集模块与检测模块电连接,数据收集模块与换算模块电连接,换算模块与驱动模块电连接,驱动模块分别与转向器10、液压泵7、电控阀11、气泵3电连接;
41.数据收集模块用于根据检测模块检测出的树叶分布情况和杀虫时的位置高度,对该数据进行收集,换算模块用于根据收集的数据进行换算,得出后续对结构的驱动数据,驱动模块用于根据换算得出的结果对转向器10、液压泵7、电控阀11、气泵3进行控制;
42.智能杀虫系统包括以下运行步骤:
43.s1、操作人员通过外部电源驱动智能杀虫机构运行,智能杀虫系统通过电驱动控制气泵3运行,气泵3对伸缩杆4内部注入气体,伸缩杆4伸长,带动气泵3沿滑轨2向上移动,带动安置板5向上移动,从而带动杀虫机构向上移动,同时带动扫描仪6向上移动,从而使杀虫机构的所处位置高度发生变化,同时通过电驱动控制扫描仪6和高度识别模块运行;
44.s2、扫描仪6对榕树表面进行扫描,将扫描后的图像进行分析,从而判断出榕树的树叶分布情况,其中,s为扫描仪6扫描到的树叶分布情况,s
叶
为扫描仪6扫描区域树叶分布的总面积大小,s
扫
为扫描仪6扫描区域的总面积大小,s
系
为树叶分布情况系数,高度识别模块根据扫描仪6从初始位置向上移动时的上升高度,从而判断出杀虫机构的位置高度,h为杀虫机构杀虫时的位置高度,并将两个数据传输进数据传输模块和数据收集模块内;
45.s3、数据传输模块再将数据传输出去,传输出去的数据被数据接收模块所接收,接收到的数据通过电传输从数据接收模块传递到计算模块中,计算模块对得到的数据进行自动计算得出结果,并将结果输入进控制模块中;
46.s4、杀虫工作开始,控制模块控制液压泵7和电机9运行,液压泵7将杀虫剂输入到电控阀11内,再注入到喷头12内,最后从喷头12喷出对榕树进行杀虫工作,电机9顺逆交替转动,带动齿轮传动机构顺逆交替转动,齿轮传动机构带动转向器10转动,带动电控阀11转动,从而带动喷头12转动,从而对喷头12进行横向角度调节工作,并根据杀虫机构杀虫时的位置高度改变液压泵7的杀虫剂排放量,使喷头12喷出的杀虫剂量发生改变,同时根据杀虫机构杀虫时的位置高度改变电机9角度调节幅度,改变喷头12左右摆动的幅度;
47.s5、控制模块根据杀虫机构杀虫时的位置高度改变电机9顺逆交替转动的速度,从而改变喷头12左右摆动时的摆动速度,同时控制电机9摆动过程中每摆动十度停留一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短;
48.s6、同时数据收集模块对数据进行收集,并将数据传输到换算模块内,换算模块对数据进行换算得到结果,并将结果输入到驱动模块中,当杀虫机构杀虫时的位置高度大于系统设定值时进入s7,当杀虫机构杀虫时的位置高度小于二米时进入s8,反之进入s10;
49.s7、驱动模块控制转向器10、电控阀11和液压泵7运行模式发生改变,转向器10自身转动,带动喷头12对榕树进行上下摆动式喷洒杀虫剂工作,并根据树叶分布情况改变喷头12上下摆动时的速度,同时控制电控阀11使喷射的杀虫剂为水柱式,并根据树叶分布情
况改变液压泵7排放杀虫剂的力度,从而改变喷射的力度,之后进入s10;
50.s8、驱动模块通过电驱动控制电控阀11、液压泵7和气泵3运行模式发生改变,控制电控阀11使喷射的杀虫剂为水柱式,液压泵7最大功率运行,喷射强度最大化,之后液压泵7正常功率运行,并根据杀虫机构杀虫时的位置高度控制最大功率运行的时间,从而改变最大强度喷射的喷射时间,同时控制气泵3使伸缩杆4每伸长十厘米停一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,当树叶分布情况小于系统设定值后进入s9,反之进入s10;
51.s9、驱动模块通过电驱动控制智能杀虫系统停止运行,使该装置各结构停止运行,同时发出树叶分布情况的数据到手机端;
52.s10、纺织布烘干完毕后,操作人员关闭控制面板3,智能杀虫系统停止运行,如继续进行下一次烘干工作则重复s1至s9;
53.s1至s4中,通过扫描仪6对榕树表面进行扫描,将扫描后的图像进行分析,高度识别模块根据扫描仪6从初始位置向上移动时的上升高度,从而判断出杀虫机构的位置高度,控制模块控制液压泵7和电机9运行,当20m《h≤30m时,表示杀虫机构所处位置高度较高,这时控制模块控制液压泵7的杀虫剂排放量较多,使喷头12喷出的杀虫剂量较多,同时控制电机9角度调节幅度较小,使喷头12左右摆动的幅度较小,当10m《h≤20m时,表示杀虫机构所处位置高度较中间,这时控制模块控制液压泵7的杀虫剂排放量较正常,使喷头12喷出的杀虫剂量较正常,同时控制电机9角度调节幅度较正常,使喷头12左右摆动的幅度较正常,当0m《h≤10m时,表示杀虫机构所处位置高度较低,这时控制模块控制液压泵7的杀虫剂排放量较少,使喷头12喷出的杀虫剂量较少,同时控制电机9角度调节幅度较大,使喷头12左右摆动的幅度较大,针对杀虫机构所处位置越高,使喷头12喷出的杀虫剂量越多,上方受到光照较好导致树叶极为茂盛,大量的食叶性害虫分布于树木上方对榕树叶进行啃食,从而能够使树木上方的虫子能够被清除干净,提高除虫效果,同时使喷头12左右摆动的幅度较小,上方的树木胸径较小,从而使杀虫剂对该部分进行局部喷洒,并避免下方已经喷洒过的部分受到多次喷洒影响树木整体质量,避免损伤树木,并针对杀虫机构所处位置越低,使喷头12喷出的杀虫剂量越少,下方多为刺入式害虫对树干内部进行啃食,树干对杀虫剂吸收效果较好,能够杀虫的同时避免杀虫剂排放过多导致树木内部结构受到损伤,同时使喷头12左右摆动的幅度较大,使其进行大范围的喷洒工作,充分杀虫;
54.s5中,控制模块根据杀虫机构杀虫时的位置高度改变电机9顺逆交替转动的速度,从而改变喷头12左右摆动时的摆动速度,同时控制电机9摆动过程中每摆动十度停留一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,当20m《h≤30m时,表示杀虫机构所处位置高度较高,这时控制模块控制电机9顺逆交替转动的速度较慢,使喷头12左右摆动时的摆动速度较慢,同时控制电机9摆动过程中每摆动十度停留的时间较长,使喷头12左右摆动时停留的时间较长,当10m《h≤20m时,表示杀虫机构所处位置高度较中间,这时控制模块控制电机9顺逆交替转动的速度较正常,使喷头12左右摆动时的摆动速度较正常,同时控制电机9摆动过程中每摆动十度停留的时间较正常,使喷头12左右摆动时停留的时间较正常,当0m《h≤10m时,表示杀虫机构所处位置高度较低,这时控制模块控制电机9顺逆交替转动的速度较快,使喷头12左右摆动时的摆动速度较快,同时控制电机9摆动过程中每摆动十度停留的时间较短,使喷头12左右摆动时停留的时间较短,针对杀虫机构所处位置高度越
高,使喷头12左右摆动时的摆动速度越慢,使喷头12能够对树木进行仔细的喷洒,提高对虫子的杀虫效果,并使喷头12左右摆动时停留的时间越长,从而对树木进行局部长时间喷洒,进一步加大杀虫效果,保证虫子被充分灭杀,保障榕树的生长健康,并针对杀虫机构所处位置高度越低,使喷头12左右摆动时的摆动速度越快,减少杀虫剂的浪费并加快杀虫速度,使杀虫效率大大提升,并使喷头12左右摆动时停留的时间越短,避免树木受到杀虫剂侵蚀过严重,对树木进行保护,同时有具备较好的杀虫能力;
55.s7中,当h>h
设
时,h
设
为系统设定的杀虫机构的位置高度,这时榕树叶浓密程度极高,叶子分布极为密集,扫描仪6扫描出的图像不准确,s丿=s h*s
系
,其中,s丿为榕树叶实际分布情况,s
系
为单个单位的杀虫机构位置高度下榕树叶的相对分布情况,驱动模块控制转向器10、电控阀11和液压泵7运行模式发生改变,转向器10自身转动,带动喷头12对榕树进行上下摆动式喷洒杀虫剂工作,并根据树叶分布情况改变喷头12上下摆动时的速度,同时控制电控阀11使喷射的杀虫剂为水柱式,并根据树叶分布情况改变液压泵7排放杀虫剂的力度,从而改变喷射的力度,当s丿越大时,喷头12上下摆动时的速度越慢,喷头12喷出杀虫剂水柱的力度越大,针对榕树叶实际分布越密,从而喷头12上下摆动越慢,并使喷出的杀虫剂为水柱式,从而能够将杀虫剂喷射到树叶背部,对隐藏在树叶背部的虫子进行灭杀工作,摆动速度慢能够使杀虫更为均匀,杀虫效果得到显著提升,并使杀虫剂喷射的力度越大,使杀虫剂能够充分射到树叶背部,保证高效杀虫,并针对榕树叶实际分布越稀,从而喷头12上下摆动越快,加快杀虫的速度并避免树叶被长时间喷射影响树叶的健康,并使杀虫剂喷射的力度越小,防止杀虫剂喷洒过多导致过度浪费,节省成本;
56.s8中,当h《2m时,这时扫描仪6位于树干部分,扫描仪6扫描出的树叶分布情况为零,驱动模块通过电驱动控制电控阀11、液压泵7和气泵3运行模式发生改变,控制电控阀11使喷射的杀虫剂为水柱式,液压泵7最大功率运行,喷射强度最大化,之后液压泵7正常功率运行,并根据杀虫机构杀虫时的位置高度控制最大功率运行的时间,从而改变最大强度喷射的喷射时间,同时控制气泵3使伸缩杆4每伸长十厘米停一下,并根据杀虫机构杀虫时的位置高度控制停留的时间长短,t
停
=h*t
比
,其中,t
喷
为杀虫剂最大强度喷射的喷射时间,t
总
为杀虫剂最大强度喷射的最长喷射时间,t
系
为单个单位的杀虫机构杀虫时的位置高度下杀虫剂最大强度喷射的喷射时间,t
停
为气泵3使伸缩杆4每伸长十厘米停留的时间长短,t
比
为单个单位的杀虫机构杀虫时的位置高度下气泵3使伸缩杆4每伸长十厘米停留的时间长短,当杀虫机构杀虫时的位置高度越往上升,杀虫剂最大强度喷射的喷射时间越短,气泵3使伸缩杆4每伸长十厘米停留的时间越长,杀虫机构杀虫时的位置高度越往上升,使杀虫剂最大强度喷射的喷射时间越短,一方面能够对榕树内整体树干进行有效杀虫,一方面防止杀虫剂持续大功率喷射导致杀虫剂被过度浪费,停留的时间越长,越往上越接近树叶从而避免树叶被大功率冲击到影响树叶健康;
57.s9中,当杀虫机构上升到树顶位置后,这时扫描仪6扫描出的s《s
设
时,s
设
为系统设定的榕树叶分别情况,表示树木表面的树叶极为稀疏,榕树即将死亡,驱动模块通过电驱动控制智能杀虫系统停止运行,使该装置各结构停止运行,同时发出树叶分布情况的数据到手机端,用于提醒管理人员知晓榕树的健康情况,使管理人员能够对即将死亡的榕树进行针对性救治工作。
58.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
59.最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。