1.本发明涉及石英石板材加工技术领域,具体为一种石英石板材机器人布料系统及方法。
背景技术:
2.石英石是一种由90%以上的石英晶体加上树脂及其他微量元素人工合成的一种新型石材,石英的成份是最简单的二氧化硅,玻璃光泽,没有解理面,但具贝壳状断口,微晶质的石英称为玉髓、玛瑙或碧玉,纯粹的石英是无色,但因常含有过渡元素的杂质而呈现不同的颜色,石英很安定,不容易风化或变化为他种矿物,按sio2结晶程度可划分为显晶质的单晶石英,多晶石英岩玉,光泽:玻璃光泽,它是通过特殊的机器在一定的物理、化学条件下压制而成的大规格板材,它的主要材料是石英,石英是一种受热或压力就容易变成液体状的矿物,也是相当常见的造岩矿物,在三大类岩石中皆有之,因为它在火成岩中结晶最晚,所以通常缺少完整晶面,多半填充在其他先结晶的造岩矿物中间,石英石的主要材料是石英,色彩丰富的组合使其具有天然石材的质感和美丽的表面光泽,石英石台面色彩多样,戈壁系列、水晶系列、麻石系列、闪星系列更具特色,且适用性较为广泛,可以广泛应用于公共建筑。
3.然而现有的石英石板材的布料加工采用人工加料的方式,而加料漏斗的与布料装置之间存在间距,人工将石英石板材的原料加至加料漏斗时增加了工作人员的工作量,并且人工加料的方式减缓了原料添加的进度,从而降低了石英石板材布料加工的工作效率;同时,石英石板材在布料后需要进行烘干压制,在布料时会出现高度的不同,从而降低了石英石板材布料的质量和品质,并且导致石英石板材加工后的不合格数量的增加,则会增加石英石板材加工的成本。
技术实现要素:
4.本发明提供了一种石英石板材机器人布料系统及方法,解决了上述背景技术所提出的问题中至少一项。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种石英石板材机器人布料系统,包括石英石板材布料装置本体,所述石英石板材布料装置本体的中部设置有布料传送带,所述石英石板材布料装置本体的上端面还设置有加料漏斗,所述石英石板材布料装置本体的左侧固定连接有上料固定架,所述上料固定架的内壁活动套接有上料延长杆,所述上料延长杆的内部设置有升降装置,所述上料延长杆的上方设置有原料罐。
6.可选的,所述石英石板材布料装置本体的下端面固定安装有布料装置底座,所述石英石板材布料装置本体上端面的前后两侧固定连接有立柱,所述立柱的外壁设置有刻度标线,所述立柱远离石英石板材布料装置本体的一端固定连接有,所述的下方设置有位于布料传送带上方的布料刮板。
7.可选的,所述上料延长杆的一侧固定连接有短杆一,所述短杆一远离上料延长杆
的一端固定安装有底板,所述底板上端面的右侧固定安装有一号支架,所述一号支架远离底板的一端安装有活动卡箍。
8.可选的,所述升降装置包括与上料延长杆内壁固定连接的直尺条,所述直尺条远离上料延长杆的一侧活动连接有直齿轮,所述直齿轮的内壁固定套接有转动杆。
9.可选的,所述转动杆后端固定连接有位于上料固定架背面的一号减速器,所述一号减速器远离转动杆的而一侧安装有一号电机,所述的内壁螺纹套接有高度控制旋转杆,且高度控制旋转杆下端的外壁与布料刮板上端面的内壁活动连接,所述布料刮板的前后两侧固定连接有位于立柱外壁的限位圆环。
10.可选的,所述底板的内部设置有活动装置,所述活动装置的一端固定连接有二号减速器,所述二号减速器远离活动装置的一侧安装有二号电机,所述底板的上端面固定安装有二号支架,所述二号支架中部的外壁活动套接有连接杆,所述连接杆远离二号支架一端的内壁活动套接有三号支架,所述三号支架的上端面固定连接有支撑板;
11.所述活动卡箍的下端面与支撑板的上端面固定连接,所述活动卡箍左右两侧的内壁活动套接有t形杆一,且t形杆一一端的外壁与原料罐的内壁活动套接,所述t形杆一的外壁活动套接有弹簧,所述弹簧的一端与活动卡箍的外壁固定连接,且弹簧远离活动卡箍的一端与弹簧的一端固定连接,所述活动卡箍的正面螺纹套接有定位螺栓。
12.可选的,所述活动装置包括与底板的内壁活动套接的长杆,所述长杆的外壁螺纹套接有活动块,且活动块的内壁设置有与长杆内壁相对应的螺纹,所述活动块的前后两侧固定连接有滑块一,所述长杆的左端与二号减速器的输出轴固定连接,所述活动块的上端面与的下端面固定连接。
13.可选的,所述石英石板材布料装置本体(1)包括:无线充电模块、移动智能模块和终端;终端通过石英石板材的数量和摆放位置规划机器人布料机的行走路径并将规划数据传输到移动智能模块,所述移动智能模块控制机器人布料机沿规划路径自行移动进行布料,机器人布料机行走速度和螺旋给料速度保持一致;所述终端检测机器人布料机电量情况,若终端检测电量低于30%,机器人布料机通过无线充电模块进行充电。
14.可选的,所述加料漏斗的下料方向为向下,所述加料漏斗内设有出料调节装置,且所述出料调节装置对称设置在所述加料漏斗内壁左右两端或前后两端,所述出料调节装置包括:
15.驱动电机一,所述驱动电机一固定安装在所述加料漏斗内壁上,且所述驱动电机一的输出轴固定安装有螺纹杆,且所述螺纹杆另一端螺纹连接在套筒内;
16.锥齿轮一,所述锥齿轮一固定安装在所述螺纹杆上;
17.短杆二,所述短杆二两端分别固定安装在所述加料漏斗内壁和固定板上,且所述固定板上下两端固定安装在所述加料漏斗内壁上;
18.限位块,所述限位块滑动连接在所述短杆二上,且所述限位块底端固定安装在所述套筒上;
19.长杆,所述长杆一端穿过滑块二与锥齿轮二固定连接,所述长杆另一端穿过所述加料漏斗与握把固定连接;
20.所述长杆与所述滑块二通过轴承转动连接,且所述滑块二滑动连接在所述加料漏斗内壁所设滑槽内;
21.若干减震机构,所述减震机构对称设置在所述套筒上下两端,包括:固定块一和固定块二,所述固定块一和固定块二分别固定安装在所述固定板和清洗箱上;箱体二,所述箱体二一端固定安装在所述固定块一上,且所述箱体二另一端开口;t形杆二,所述t形杆二一端滑动连接在所述箱体二内壁上,且所述t形杆二另一端固定安装在矩形块上,且所述矩形块另一端固定安装在所述固定块二上;调节弹簧,所述调节弹簧套设在所述箱体二和t形杆二上,且所述调节弹簧两端分别固定安装在所述固定块一和固定块二上;
22.所述套筒另一端穿过所述固定板与所述清洗箱固定连接,且所述清洗箱另一端固定安装有移动板,且所述移动板上设有若干通孔一,所述固定块二与所述清洗箱固定连接;
23.所述清洗箱滑动连接在所述加料漏斗内壁上,所述清洗箱内设置:保护壳,所述保护壳固定安装在腔体一内壁上,腔体一设置在所述清洗箱内;驱动电机二,所述驱动电机二固定安装在所述保护壳内,且所述驱动电机二上下两端固定安装有减震棉,且所述驱动电机二的输出轴固定安装有连接杆;所述连接杆周测固定安装有若干搅拌杆一;搅拌杆二,所述搅拌杆二固定安装在所述腔体一内壁上,且所述腔体一靠近所述移动板的一端设有通孔二;腔体二,所述腔体二两端分别与所述通孔一和通孔二连通;所述腔体一上下两端对称设置有腔体三和腔体四,且所述腔体三和腔体四分别通过连接管与所述腔体一连通;若干水泵,所述水泵与所述连接管连接。
24.一种石英石板材机器人布料系统的布料方法,包括以下操作步骤:
25.s1、石英石板材的加料
26.s1.1、首先,将装有石英石板材原料的原料罐放置在活动卡箍的内部,再拉动弹簧,此时弹簧向活动卡箍外部运动的同时拉伸t形杆一,待原料罐放置好后,松开弹簧,利用t形杆一的回弹,使得弹簧的一端插至原料罐外壁开设的卡槽的内部,此时原料罐与活动卡箍放置的位置已固定,再转动弹簧,将活动卡箍连接至闭合的空间;
27.s1.2、然后,开启一号电机和一号减速器的电源,一号减速器的开启对一号电机转速的调节,此时转动杆发生转动,转动杆圆周转动的同时带动直齿轮的同步转动,直齿轮转动的同时带动直尺条的竖直方向的升降运动,直齿轮运动的同时带动上料固定架同方向的升降运动,上料固定架运动的同时则会带动原料罐的同步运动,即可实现对原料罐加料高度的调节,当原料罐调节至加料的高度即可关闭一号电机的电源;
28.s1.3、最后,开启二号电机和二号减速器的电源,二号减速器的开启对二号电机的输出轴转速的调节,此时二号电机的开启带动长杆的转动,长杆圆周转动的同时会受到滑块一的限制,使得活动块只能在长杆的外壁做水平方向的运动,活动块运动的同时则会带动二号支架的同方向的运动,二号支架运动的同时通过连接杆的连接,使得支撑板的左端的向上运动,并且三号支架在一号支架的外壁上发生转动,随着支撑板一端的向上运动使得原料罐逐渐处于倾斜的状态,随着倾斜角度的不断增加,原料罐内部的原料会落至加料漏斗的内部;
29.s2、石英石板材的布料
30.s2.1、首先,开启布料传送带的电源,布料传送带电源开启后,布料传送带会在加料漏斗的下方发生传送的运动,然后,开启加料漏斗的出料电源,加料漏斗电源开启后会将内部的石英石板材布料的原料落至布料传送带的上端面,随着布料传送带的不断传送,最后,即可实现对石英石板材布料的加工;
31.s3、石英石板材的抹平
32.s3.1、首先,根据石英石板材布料的厚度调节布料刮板与石英石板材的距离,对高度控制旋转杆进行圆周转动,高度控制旋转杆圆周转动的同时还会在支撑板的内壁做竖直方向的升降运动,然后,高度控制旋转杆做升降运动的同时会带动布料刮板做同步运动,布料刮板运动的同时会带动限位圆环在立柱的外壁做同方向的运动,根据刻度标线的显示,当限位圆环运动至需要抹平的高度时,最后,即可停止对高度控制旋转杆的转动。
33.本发明具备以下有益效果:
34.1、该石英石板材机器人布料系统及方法,通过石英石板材布料装置本体、升降装置、活动装置和原料罐之间的配合,利用装置对原料罐高度的调节,同时利用活动装置对原料罐的倾倒,达到了机械上料的效果,有效地解决了人工上料的问题,采用机械上料的方式替代了人工上料,减轻了工作人员的工作量,加快了石英石板材加工的上料的进度,从而提高了石英石板材加工的工作效率。
35.2、该石英石板材机器人布料系统及方法,通过石英石板材布料装置本体、活动卡箍、定位螺栓和原料罐之间的配合,利用定位螺栓的安装,实现了活动卡箍与原料罐的紧固作用,有效地解决了对原料罐的更换问题,采用直接将原料罐更换的方式,节省了工作人员倒料的工作,避免了工作人员在倒料的过程中原料的外溅,减少了原料在倒料时的浪费,提高了原料的利用率。
36.3、该石英石板材机器人布料系统及方法,通过石英石板材布料装置本体、布料刮板、限位圆环和刻度标线之间的配合,利用刻度标线的标识,达到了对布料刮板与石英石板材厚度的调节效果,有效地解决了石英石板材布料的不平整的问题,采用布料刮板对石英石板材的整平,提高了石英石板材加工的质量和品质。
37.4、该石英石板材机器人布料系统及方法,通过石英石板材布料装置本体与无线充电模块、移动智能模块和终端之间的配合,利用移动智能模块,达到了对机器人布料机的移动功能,利用无线充电模块,实现机器人布料机在移动的过程中可以自行充电,而且充电效率高,控制容易,通过终端的控制提高自动化,减少人工操作。
附图说明
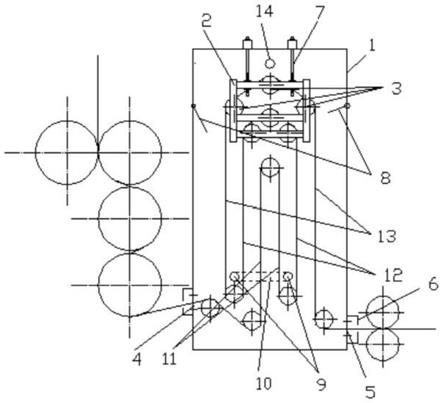
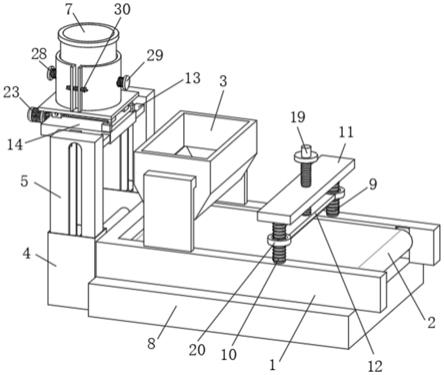
38.图1为本发明结构示意图;
39.图2为本发明结构中延长杆的侧视图;
40.图3为本发明结构中一号电机的后视图;
41.图4为本发明结构中布料刮板的侧视图;
42.图5为本发明结构中活动装置的侧视图;
43.图6为本发明结构中出料调节装置安装位置图;
44.图7为本发明结构中出料调节装置的剖视图;
45.图8为本发明图7中a点放大示意图;
46.图9为本发明图7中b点放大示意图。
47.图中:1、石英石板材布料装置本体;2、布料传送带;3、加料漏斗;4、上料固定架;5、上料延长杆;6、升降装置;61、直尺条;62、直齿轮;63、转动杆;7、原料罐;8、布料装置底座;9、立柱;10、刻度标线;11、支撑板;12、布料刮板;13、短杆一;14、底板;15、一号支架;16、活
动卡箍;17、一号减速器;18、一号电机;19、高度控制旋转杆;20、限位圆环;21、活动装置;211、长杆;212、活动块;213、滑块一;22、二号减速器;23、二号电机;24、二号支架;25、连接杆;26、三号支架;27、支撑板;28、t形杆一;29、弹簧;30、定位螺栓;31、驱动电机一;32、螺纹杆;33、套筒;34、锥齿轮一;35、短杆二;36、固定板;37、限位块;38、长杆;39、滑块二;40、锥齿轮二;41、握把;42、滑槽;431、固定块一;432、固定块二;44、清洗箱;45、箱体二;46、t形杆二;47、矩形块;48、移动板;49、通孔一;50、保护壳;51、腔体一;52、驱动电机二;53、减震棉;541、搅拌杆一;542、搅拌杆二;55、通孔二;56、腔体二;57、腔体三;58、腔体四;59、连接管;60、水泵;61、出料调节装置;62、调节弹簧;63、连接杆。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.请参阅图1与图4,本发明提供一种技术方案:一种石英石板材机器人布料系统,包括石英石板材布料装置本体1,石英石板材布料装置本体1的中部活动安装有布料传送带2,石英石板材布料装置本体1的上端面固定安装有位于布料传送带2左侧的加料漏斗3,石英石板材布料装置本体1的左侧固定连接有上料固定架4,上料固定架4的内壁活动套接有上料延长杆5,上料延长杆5的内部设置有升降装置6,升降装置6的安装可实现原料罐7的升降运动,从而替代了人工上料的方式,减轻了工作人员的工作量,加快了人工上料的进度,上料延长杆5的上方设置有原料罐7,石英石板材布料装置本体1的下端面固定安装有布料装置底座8,石英石板材布料装置本体1上端面的前后两侧固定连接有立柱9,立柱9的外壁设置有刻度标线10,刻度标线10的设置可实现对石英石板材厚度的控制,立柱9远离石英石板材布料装置本体1的一端固定连接有支撑板11,支撑板11的下方设置有位于布料传送带2上方的布料刮板12,布料刮板12的活动可对石英石板材的抹平工作,从而提高了石英板材的质量和品质,上料延长杆5的一侧固定连接有短杆一13,短杆一13远离上料延长杆5的一端固定安装有底板14,底板14上端面的右侧固定安装有一号支架15,一号支架15远离底板14的一端安装有活动卡箍16。
50.请参阅图2与图5,升降装置6包括与上料延长杆5内壁固定连接的直尺条61,直尺条61远离上料延长杆5的一侧活动连接有直齿轮62,直齿轮62的内壁固定套接有转动杆63,转动杆63后端固定连接有位于上料固定架4背面的一号减速器17,一号减速器17远离转动杆63的而一侧安装有一号电机18,支撑板11的内壁螺纹套接有高度控制旋转杆19,且高度控制旋转杆19下端的外壁与布料刮板12上端面的内壁活动连接,布料刮板12的前后两侧固定连接有位于立柱9外壁的限位圆环20,底板14的内部设置有活动装置21,活动装置21起到对原料罐7的倾倒作用,实现了机械倾倒的作用,替代了人工倒料的方式,减轻了工作人员的工作量,活动装置21包括与底板14的内壁活动套接的长杆211,长杆211的外壁螺纹套接有活动块212,且活动块212的内壁设置有与长杆211内壁相对应的螺纹,活动块212的前后两侧固定连接有滑块一213,长杆211的左端与二号减速器22的输出轴固定连接,活动块212的上端面与24的下端面固定连接,活动装置21的一端固定连接有二号减速器22,二号减速
器22起到对二号电机22转速的调节作用,二号减速器22远离活动装置21的一侧安装有二号电机23,底板14的上端面固定安装有二号支架24,二号支架24中部的外壁活动套接有连接杆25,连接杆25远离二号支架24一端的内壁活动套接有三号支架26,三号支架26的上端面固定连接有支撑板27。
51.请参阅图3与图1,活动卡箍16的下端面与支撑板27的上端面固定连接,活动卡箍16左右两侧的内壁活动套接有t形杆一28,且t形杆一28一端的外壁与原料罐7的内壁活动套接,t形杆一28的外壁活动套接有弹簧29,弹簧29的一端与活动卡箍16的外壁固定连接,弹簧29的弹性带到那个了t形杆一28的活动和复位,且弹簧29远离活动卡箍16的一端与弹簧29的一端固定连接,活动卡箍16的正面螺纹套接有定位螺栓30,定位螺栓起到原料罐7与活动卡箍16的连接作用,加固原料罐7的稳定性,同时还便于对原料罐7的更换。
52.一个实施例中,所述石英石板材布料装置本体(1)包括:无线充电模块、移动智能模块和终端;终端通过石英石板材的数量和摆放位置规划机器人布料机的行走路径并将规划数据传输到移动智能模块,所述移动智能模块控制机器人布料机沿规划路径自行移动进行布料,机器人布料机行走速度和螺旋给料速度保持一致;所述终端检测机器人布料机电量情况,若终端检测电量低于30%,机器人布料机通过无线充电模块进行充电。
53.一种石英石板材机器人布料系统及方法,包括以下操作步骤:
54.s1、石英石板材的加料
55.s1.1、首先,将装有石英石板材原料的原料罐7放置在活动卡箍16的内部,再拉动弹簧29,此时弹簧29向活动卡箍16外部运动的同时拉伸t形杆一28,待原料罐7放置好后,松开弹簧29,利用t形杆一28的回弹,使得弹簧29的一端插至原料罐7外壁开设的卡槽的内部,此时原料罐7与活动卡箍16放置的位置已固定,再转动弹簧29,将活动卡箍16连接至闭合的空间;
56.s1.2、然后,一号电机18和一号减速器17的电源,一号减速器17的开启对一号电机18转速的调节,此时转动杆63发生转动,转动杆63圆周转动的同时带动直齿轮62的同步转动,直齿轮62转动的同时带动直尺条61的竖直方向的升降运动,直齿轮62运动的同时带动上料固定架4同方向的升降运动,上料固定架4运动的同时则会带动原料罐7的同步运动,即可实现对原料罐7加料高度的调节,当原料罐7调节至加料的高度即可关闭一号电机18的电源;
57.s1.3、最后,开启二号电机23和二号减速器22的电源,二号减速器22的开启对二号电机23的输出轴转速的调节,此时二号电机23的开启带动长杆211的转动,长杆211圆周转动的同时会受到滑块一213的限制,使得活动块212只能在长杆211的外壁做水平方向的运动,活动块212运动的同时则会带动二号支架24的同方向的运动,二号支架24运动的同时通过连接杆25的连接,使得支撑板27的左端的向上运动,并且三号支架26在一号支架15的外壁上发生转动,随着支撑板27一端的向上运动使得原料罐7逐渐处于倾斜的状态,随着倾斜角度的不断增加,原料罐7内部的原料会落至加料漏斗3的内部。
58.s2、石英石板材的布料
59.s2.1、首先,开启布料传送带2的电源,布料传送带2电源开启后,布料传送带2会在加料漏斗3的下方发生传送的运动,然后,开启加料漏斗3的出料电源,加料漏斗3电源开启后会将内部的石英石板材布料的原料落至布料传送带2的上端面,随着布料传送带2的不断
传送,最后,即可实现对石英石板材布料的加工。
60.s3、石英石板材的抹平
61.s3.1、首先,根据石英石板材布料的厚度调节布料刮板12与石英石板材的距离,对高度控制旋转杆19进行圆周转动,高度控制旋转杆19圆周转动的同时还会在支撑板11的内壁做竖直方向的升降运动,然后,高度控制旋转杆19做升降运动的同时会带动布料刮板12做同步运动,布料刮板12运动的同时会带动限位圆环20在立柱9的外壁做同方向的运动,根据刻度标线10的显示,当限位圆环20运动至需要抹平的高度时,最后,即可停止对高度控制旋转杆19的转动。
62.机器人布料机使用可用度,用一段时间内其工作时间与总时间的比值来计算,若时间段为一个台班wq(一般为8小时),则机器人布料机工作台班使用可用度a计算公式表示如下:
[0063][0064]
其中,a为机器人布料机工作台班使用可用度;wq为台班时间;wh为机器人布料机工作前平均准备时间;wa为机器人布料机工作后平均维护时间;tg为平均故障维护处理时间;rs为故障概率次数。
[0065]
在一个实施例中,请参阅图6到图9,所述加料漏斗3的下料方向为向下,所述加料漏斗3内设有出料调节装置61,且所述出料调节装置61对称设置在所述加料漏斗3内壁左右两端或前后两端,所述出料调节装置61包括:
[0066]
驱动电机一31,所述驱动电机一31固定安装在所述加料漏斗3内壁上,且所述驱动电机一31的输出轴固定安装有螺纹杆32,且所述螺纹杆32另一端螺纹连接在套筒33内;
[0067]
锥齿轮一34,所述锥齿轮一34固定安装在所述螺纹杆32上;
[0068]
短杆二35,所述短杆二35两端分别固定安装在所述加料漏斗3内壁和固定板36上,且所述固定板36上下两端固定安装在所述加料漏斗3内壁上;
[0069]
限位块37,所述限位块37滑动连接在所述短杆二35上,且所述限位块37底端固定安装在所述套筒33上;
[0070]
长杆38,所述长杆38一端穿过滑块二39与锥齿轮二40固定连接,所述长杆38另一端穿过所述加料漏斗3与握把41固定连接;
[0071]
所述长杆38与所述滑块二39通过轴承转动连接,且所述滑块二39滑动连接在所述加料漏斗3内壁所设滑槽42内;
[0072]
可选的,且所述滑块二39与移动驱动件连接(具体的所述移动驱动件以及连接方式,可为伸缩杆,所述伸缩杆输出端与所述滑块二39固定连接,且所述伸缩杆固定端与所述加料漏斗3内壁连接);
[0073]
若干减震机构,所述减震机构对称设置在所述套筒33上下两端,包括:固定块一431和固定块二432,所述固定块一431和固定块二432分别固定安装在所述固定板36和清洗箱44上;箱体二45,所述箱体二45一端固定安装在所述固定块一431上,且所述箱体二45另一端开口;t形杆二46,所述t形杆二46一端滑动连接在所述箱体二45内壁上,且所述t形杆二46另一端固定安装在矩形块47上,且所述矩形块47另一端固定安装在所述固定块二432上;调节弹簧62,所述调节弹簧62套设在所述箱体二45和t形杆二46上,且所述调节弹簧62
两端分别固定安装在所述固定块一431和固定块二432上;
[0074]
所述套筒33另一端穿过所述固定板36与所述清洗箱44固定连接,且所述清洗箱44另一端固定安装有移动板48,且所述移动板48上设有若干通孔一49,所述固定块二432与所述清洗箱44固定连接;
[0075]
所述清洗箱44滑动连接在所述加料漏斗3内壁上,所述清洗箱44内设置:保护壳50,所述保护壳50固定安装在腔体一51内壁上,腔体一51设置在所述清洗箱44内;驱动电机二52,所述驱动电机二52固定安装在所述保护壳50内,且所述驱动电机二52上下两端固定安装有减震棉53,且所述驱动电机二52的输出轴固定安装有连接杆63;所述连接杆63周测固定安装有若干搅拌杆一541;搅拌杆二542,所述搅拌杆二542固定安装在所述腔体一51内壁上,且所述腔体一51靠近所述移动板48的一端设有通孔二55;腔体二56,所述腔体二56两端分别与所述通孔一49和通孔二55连通;所述腔体一51上下两端对称设置有腔体三57(所述有腔体三57中用于添加清洗剂)和腔体四58(储存水),且所述腔体三57和腔体四58分别通过连接管59与所述腔体一51连通;若干水泵60,所述水泵60与所述连接管59连接。
[0076]
上述技术方案的工作原理为:首先启动驱动电机一31,所述驱动电机一31带动所述螺纹杆32转动,所述螺纹杆32转动带动所述套筒33向清洗箱44方向移动,所述清洗箱44移动,带动所述移动板48向内侧移动,同时所述清洗箱44移动带动所述固定块二432移动,所述固定块二432移动带动所述t形杆二46在所述箱体二45中滑动,与此同时,对所述调节弹簧62进行拉伸,从而控制所述出料漏斗3的出料量;当所述驱动电机一31发生故障时,使用者可通过向上推动所述握把41,同时使的所述滑块二39在所述滑槽42内向上移动,直到所述锥齿轮二40与所述锥齿轮一34啮合,然后转动所述握把41,所述握把41转动带动所述锥齿轮二40和所述锥齿轮一34转动,从而对所述套筒33进行转动调节;
[0077]
当所述石英石板材机器人布料系统暂停工作时,所述出料漏斗3内经常会出现残余原料附着在所述出料漏斗3内壁上,时间太久难以清理时,首先,启动水泵60,所述水泵60将所述腔体三57中的添加清洗剂和腔体四58中的储存水通过连接管59通入到所述腔体一51中,然后启动驱动电机二52,所述驱动电机二52转动带动所述连接杆63转动,同时在所述连接杆63上固定安装的搅拌杆一541和搅拌杆二542搅拌作用下,将所述清洗剂和水充分混合,然后液体通过所述通孔二55中排到所述腔体二56中,然后通过通孔一49排出,从而对所述出料漏斗3内壁进行清洗。
[0078]
上述技术方案的有益效果为:通过设置出料调节装置61,有利于对所述出料漏斗3中的原料进行控制,防止掉落到所述布料传送带2上的原料太多或者太少,导致出料不均匀;通过设置限位块37,有利于对所述套筒33进行限位;通过设置握把41和锥齿轮二40,有利于防止所述驱动电机一31损坏后,通过手动对所述出料调节装置61进行控制,增加了该装置的实用性;通过设置减震机构,有利于对所述出料调节装置61进行减震,同时通过设置调节弹簧62,有利于对所述清洗箱44复位;通过设置腔体一51,有利于使清洗剂和水充分混合;通过设置水泵60,使的液体的流量增大,从而对通入到通孔一49中的液体的水压增大,有利于对所述出料漏斗3中的残余原料进行充分的清洗;通过设置保护壳50,有利于对所述驱动电机二52进行保护,防止液体进入到所述驱动电机二52中,对其造成短路;通过设置减震棉53,有利于对所述驱动电机二52进行减震和降噪,非常的方便实用。
[0079]
可选的,所述布料传送带2由若干v形带组成,且所述布料传送带2可改变其与水平
面之间的倾斜角度(可通过现有传送带倾斜角度调节装置进行调节),所述布料系统还包括:
[0080]
速度传感器,用于检测所述布料传送带2的传送速度;
[0081]
力传感器,所述布料传送带2表面设置测力层,所述测力层内设置若干力传感器,用于检测其所在处受到的物料的力;
[0082]
角度检测装置,用于检测所述布料传送带2与水平面之间的倾斜角度;
[0083]
控制器、报警器,所述控制器与力传感器、角度检测装置、速度传感器、报警器电连接,所述控制器基于所述力传感器、角度检测装置、速度传感器控制报警器工作,包括以下步骤:
[0084]
步骤1:根据公式(1)和力传感器、角度检测装置、速度传感器检测值,计算出所述布料传送带2的理论有效驱动功率p1:
[0085][0086]
其中p1为所述布料传送带2的理论有效驱动功率,pe为所述布料传送带2额定输出功率,v为速度传感器检测值,λ为所述v形带的摩擦因数(取值范围为0.23-0.47),m1为所述布料传送带2的质量,m2为所有力传感器的检测值的和,x1为包角修正系数(是考虑到了实际工况中由于两带轮大小不同,而导致包角不等于180度时对传动性能的影响,取值范围为(0.78-1.23),x2为带长修正系数(是考虑到了实际工况中由于载荷、疲劳等作用,导致带长不等于试验规定的特定带长时对传动造成的影响,取值范围为0.86-1.43),α为所述角度检测装置检测值,sin为正弦,g为重力加速度;例如:取pe为544.48kw,取v为6.0m/s,取λ为0.34,取m1为20kg,取m2为137.2n,取x1为0.98,取x2为1.0,取g为9.8m/s2,取sinα为0.65,通过计算可得所述布料传送带2有的理论有效驱动功率p1约等于533.09kw;
[0087]
步骤2:根据公式(2)计算出所述布料传送带2总的输出功率p
总
,所述控制器比较所述布料传送带2总的输出功率p
总
与预设输出功率范围,当实际输出功率超出预设输出功率范围时,所述控制器控制报警器报警;
[0088][0089]
其中p
总
为所述布料传送带2总的输出功率,d为所述v形带的带宽,l为所v形带的总长度,r表示布料传送带2的传送高度,tan表示正切,p0表示所述布料传送带2空载功率;其中表示所述布料传送带2提升功率(及所述布料传送带2传送到一定高度时所需功率);例如:取d为3m,取l为12m,取r为0.8m,取tanα为0.32,取p0为6kw,通过计算可得所述布料传送带2总的输出功率约为575.09kw。
[0090]
上述技术方案的有益效果为:
[0091]
首先根据公式(1)和力传感器、角度检测装置、速度传感器检测值,计算出所述布料传送带2的理论有效驱动功率,通过综合考虑所述布料传送带2额定输出功率,所述v形带的摩擦因数,所述布料传送带2的质量,包角修正系数,带长修正系数,重力加速度等因素,使得计算结果更加精确可靠;
[0092]
最后根据公式(2)并综合考虑所述v形带的带宽,所v形带的总长度,所述布料传送带2的传送高度,所述布料传送带2空载功率等因素,从而计算出所述布料传送带2总的输出功率,使得计算结果更加精确可靠。
[0093]
所述控制器控制所述力传感器、角度检测装置、速度传感器工作,当所述布料传送带2实际输出功率低于预设输出功率范围时,所述控制器控制报警器报警,从而提醒使用者增大所述布料传送带2的传送速度(或者驱动所述布料传送带2的皮带轮的转速),从而使得所述布料传送带2实际输出功率满足使用需求,从而满足了使用者对该种石英石板材机器人布料系统的需求。
[0094]
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0095]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。