1.本公开涉及一种用于存储载具的装置和一种存储载具的方法。更具体地,本公开涉及用于分别将容器存储于架子上的装置和分别将容器存储于架子上的方法。
背景技术:
2.通常,用于制造半导体设备的多个半导体处理装置被依次布置以在半导体基板上执行各种处理。半导体处理装置对其执行半导体设备制造处理的诸如半导体基板之类的物体能够以容纳在容器中的状态被供应至各半导体处理装置中,或者能够以容纳在容器中的状态从各半导体处理装置收回。容器的示例包括前开式晶圆传送盒(以下称为foup,front opening unified pod)、前开式装运箱(以下称为fosb,front opening shipping box)、仓匣(magazine)、光罩盒(reticle pod)等。
3.容器可以通过包括于架空式升降机运输(以下称为oht,overhead hoist transport)中的运送工具(vehicle)运输。运送工具可以将容纳有物体的容器运输到各个半导体处理装置的装载口,并且可以从装载口拾取容纳有经处理的物体的容器并将容器运输到外部。
4.多个容器可以临时存储在包括于储料器中的架子上,以便运送工具有效率地运输容器。当容器被装载到架子上时,作为吹扫处理,可用吹扫气体吹扫容器,以去除残留在容器中的烟气或气体,或者防止氧化膜形成于容纳在各个容器中的物体上。然而,根据容器或物体的类型,可能不必吹扫容器。
5.储料器可以在执行吹扫处理的吹扫模式和停止吹扫处理的正常模式下运行。
6.当储料器从正常模式再次返回到吹扫模式时,可能需要检查吹扫处理是否能够正确执行,这被称为吹扫质量检查处理。
7.由于吹扫质量检查处理是在停止装载到架子上的状态下执行,所以具有架子的储料器无法运行,因此储料器可能效率不佳。此外,由于操作者可能需要手动踩踏各个架子来检查吹扫质量,因此检查吹扫质量可能需要花费许多时间和大量成本。
技术实现要素:
8.本发明的实施方式供应了一种存储容器的装置,能够将储料器从正常模式切换到吹扫模式,同时自动检查使用吹扫气体吹扫容器的吹扫处理的质量。
9.本发明的实施方式供应了一种存储容器的方法,能够将储料器从正常模式切换到吹扫模式,同时自动检查使用吹扫气体吹扫容器的吹扫处理的质量。
10.根据本发明的示例性实施方式,公开了一种存储容器的装置。该装置包括:储料器,其包括多个架子,这些架子分别被配置为支承容器;吹扫单元,其被配置为当储料器处于吹扫模式时,对各个架子供应吹扫气体来吹扫容器,并且当储料器处于正常模式时,仅对各个架子供应吹扫气体;检查单元,其被配置为在储料器处于正常模式时,检查供应至各个架子的吹扫气体的吹扫质量;和控制单元,其被配置为根据检查单元的与各个所述架子相
关的检查结果将储料器在吹扫模式和正常模式之间进行改变,并被配置为根据吹扫模式和正常模式之间的切换来控制吹扫单元。
11.在示例性实施方式中,吹扫单元可仅分别向所有架子中未装载容器的空架子供应吹扫气体,以防止吹扫气体在正常模式下被供应至容器中。
12.这里,检查单元可检查与空架子相关的吹扫质量。
13.进一步地,储料器可包括转移机器人,转移机器人被配置为转移载具,控制单元控制转移机器人将装载于被占用的架子上的容器从被占用的架子转移,以将被占用的架子转换为新的空架子,且检查单元进一步检查与新的空架子相关的吹扫质量。
14.此外,检查单元可在预定时间段内检查与空架子相关的吹扫质量,且若当被占用的架子在所述预定时间段内未被转换为新的空架子时,控制单元控制转移机器人将容器从被占用的架子转移。
15.另一方面,将被占用的架子转换为新的空架子包括将容器从被占用的架子转移到检查单元完成吹扫质量检查处理的空架子,或者从储料器转移出来。
16.在示例性实施方式中,检查单元可包括:多个压力传感器,各个压力传感器被设置在各供应管线中,所述供应管线用于将吹扫气体供应至各个架子并测量吹扫气体的压力;多个流量传感器,各个流量传感器被设置在各供应管线中并测量吹扫气体的流量;和多个判断器,各个判断器被配置为在吹扫气体的压力和流量的值均在正常范围内的情况下,判断与各个架子相关的吹扫质量是否正常。
17.在示例性实施方式中,控制单元可将架子分类为多个架子组,并可控制检查单元以规则的间隔检查选定的架子组的吹扫质量。
18.这里,控制单元可根据优先级标准选择待检查的架子组的一组,所述优先级标准以如下顺序设定,即包括于特定架子组中的架子的最大数量或特定架子组中的空架子的最大数量。
19.在一个示例性实施方式中,所述装置可进一步包括显示单元,所述显示单元被配置为显示各个架子是处于吹扫模式或处于正常模式、检查单元是否执行与处于正常模式的各个架子相关的吹扫质量检查处理、以及吹扫检查处理的结果为何
20.根据本发明的示例性实施方式,公开了一种存储载具的方法,所述方法包括:在正常模式下检查供应至各个架子的吹扫气体的吹扫质量,其中吹扫气体仅供应至包括于储料器中的各个架子;和考虑与各个架子相关的吹扫质量检查的结果,将各个架子从正常模式切换到吹扫模式,在吹扫模式中,将吹扫气体供应至由一些架子支承的容器中。
21.在示例性实施方式中,可仅向所有架子中未装载容器的空架子供应吹扫气体,以防止吹扫气体被供应至容器中。
22.这里,检查各个架子的吹扫质量可包括:检查与各个空架子相关的第一吹扫质量;将容器从被占用的架子转移,以将被占用的架子转换为新的空架子;和检查与新的空架子相关的第二吹扫质量。
23.进一步地,可以在预定时间段内检查与空架子相关的第一吹扫质量,且若当在预定时间段内被占用的架子未被改变为新的空架子,则将容器从被占用的架子转移,以将被占用的架子转换为新的空架子。
24.此外,将容器从被占用的架子转移可包括在完成吹扫质量检查的情况下将容器转
移到空架子,或者从储料器转移出来。
25.同时,检查与各个空架子相关的第一吹扫质量可包括:供应吹扫气体以对空架子进行吹扫处理;测量供应至空架子的所述吹扫气体的压力和流量;和若当吹扫气体的压力和流量的值均在正常范围内时,判断与各个空架子相关的吹扫质量是否正常。
26.这里,可以仅针对各个吹扫质量被判断为正常的架子,执行将各个架子从正常模式切换到吹扫模式。
27.在示例性实施方式中,架子可被分类为多个架子组,且检查供应至各个架子的吹扫气体的吹扫质量包括以规则的间隔针对包括于选定的架子组中的架子检查吹扫质量。
28.这里,选定的架子组可以根据优先级标准而决定,所述优先级标准以如下顺序设定,即包括于特定架子组中的架子的最大数量或特定架子组中的空架子的最大数量。
29.根据本发明的示例性实施方式,公开了一种存储载具的方法,所述方法包括:在正常模式下检查供应至各个空架子的吹扫气体的吹扫质量,其中吹扫气体仅供应至包括于储料器中的各个架子;考虑与各个架子相关的吹扫质量检查的结果,将各个空架子从正常模式切换到吹扫模式,在吹扫模式中,将吹扫气体供应至由一些空架子支承的容器中;和显示各个空架子是处于吹扫模式或处于正常模式、是否完成与处于正常模式的各个架子相关的吹扫质量检查处理,以及吹扫检查处理的结果为何。
30.根据存储容器的装置和方法的示例性实施方式,检查单元能够在储料器处于正常模式时检查吹扫质量。此外,根据吹扫质量检查步骤的结果将储料器从正常模式切换到吹扫模式。
31.因为在改变储料器的模式的同时可以不要求储料器停止以检查吹扫质量,所以存储容器的装置可以优化储料器的运行效率。
32.此外,在将储料器从正常模式改变为吹扫模式的同时,可以不需要额外的吹扫质量检查处理,从而可以节省额外的吹扫质量检查处理的时间和成本。
33.本公开的以上概述并非旨在描述本公开的各个图示的实施方式或各个实施例。下面的详细说明和权利要求更具体地举例说明了这些实施方式。
附图说明
34.从以下结合附图的描述中可以更详细地理解示例性实施方式,其中:
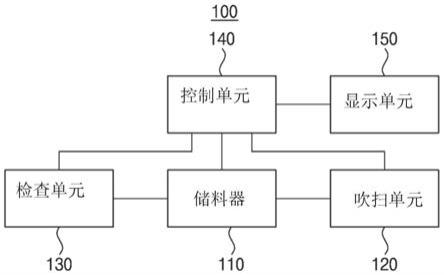
35.图1是示出本发明的实施方式的存储载具的装置的框图。
36.图2是示出图1中的储料器的俯视图。
37.图3是示出图1中的储料器、吹扫单元和检查单元的主视图。
38.图4是示出包括于图1中的储料器的多个架子组的主视图。
39.图5是示出本发明的示例性实施方式的存储载具的方法的流程图。
40.图6是示出图5中检查吹扫质量的步骤的流程图。
41.图7是示出针对图6中的空架子检查吹扫质量的步骤的流程图。
具体实施方式
42.虽然各种实施方式可有各种修改和替代形式,但其细节已经通过示例的方式在附图中示出并且将被详细描述。然而,应当理解,其并非旨在将要求保护的发明限制于所描述
的特定实施方式。相反地,旨在涵盖落入由权利要求限定的主体的精神和范围内的所有修改、等同物和替代物。
43.下面将参考附图详细描述滚道(raceway)单元和具有该滚道单元的oht的具体实施方式。然而,本发明能够以不同的形式实施并且不应被解释为限于本文阐述的实施方式。相反地,供应这些实施方式是为了使本公开更为彻底和完整,并将本发明的范围充分传达给本领域技术人员。相同的附图标记始终指代相同的组件。图中,为了清楚图示,夸大了层和区域的尺寸。
44.诸如第一、第二等术语可用于描述各种组件,但上述组件不应受到上述术语的限制。以上术语仅用于区分一种组件与另一种组件的区别。例如,在本发明中,在不脱离第一组件的范围的情况下,可以对第二组件进行类似的命名,第二组件也可以相对于第一组件进行命名。
45.本文使用的术语的目的仅用于描述特定示例性实施方式,并不旨在限制本发明构思。如本文所使用,单数形式「一」、「一个」以及「该」也旨在包括复数形式,除非上下文另外明确指出。将进一步理解的是,当在本说明书中使用术语「包括」及/或「包含」时,其指定了所述特征、整体、步骤、运行、组件及/或组件之存在,但并不排除一个或多个其他特征、整体、步骤、运行、组件、组件及/或其组之存在或增加。将进一步理解的是,当在本说明书中使用术语「包括」及/或「包含」时,其指定了所述特征、整体、步骤、运行、组件及/或组件之存在,但并不排除一个或多个其他特征、整体、步骤、运行、组件、组件及/或其组之存在或增加。
46.除非另有定义,否则本文所使用的所有术语(包括技术术语及科学术语)具有与本领域通常技术人员一般所理解之含义相同的含义。还将理解,诸如在常用辞典中定义的那些术语,除非在此明确地定义,否则应当解释为具有与其在相关技术的上下文中之含义一致的含义,且不会以理想化或过于正式的意义来解释。
47.图1是示出根据本发明的实施方式的存储载具的装置的框图。图2是示出图1中的储料器的俯视图。图3是示出图1中的储料器、吹扫单元和检查单元的主视图。图4是示出包括于图1中的储料器的多个架子组的主视图。
48.参照图1至图4,根据本发明的实施方式的存储载具的装置100包括储料器110、吹扫单元120、检查单元130、控制单元140和显示单元150。
49.储料器110包括装载口111、多个架子112和转移机器人113。
50.装载口111可以从转移单元(未示出)接收容器10。此外,转移单元可以从装载口111拾取容器10。装载口111可以提供支承容器10的空间。容纳物体(未示出)的容器10位于装载口111上。各个容器10的示例包括foup、fosb、仓匣、光罩盒等。物体可以包括半导体基板、印刷电路板、光罩等。
51.各个架子112可以被配置为存储各个容器10。架子112可以布置在水平方向和垂直方向上。尽管架子112被描绘成在图2中布置成一排,但是在图2中,架子112可以布置成彼此平行的至少两排。
52.转移机器人113设置在架子112的前方,转移机器人113可以在装载口111和架子112之间转移容器10。当架子112排列成彼此平行的两排时,转移机器人113可以布置在两排架子112之间。
53.转移机器人113能够在水平方向和垂直方向上移动或旋转以转移容器10。虽未详细示出,转移机器人113包括用于在水平方向上移动机器人臂114的水平驱动单元、用于在垂直方向上移动机器人臂114的垂直驱动单元、以及用于旋转机器人臂114的旋转驱动单元。
54.详细地,转移机器人113可以包括用于保持容器10的机器人臂114,且机器人臂114可以被配置为可朝向架子112移动。
55.例如,机器人臂114可以被配置为在垂直于左右方向的前后方向上可移动。水平驱动单元可以驱动机器人臂114在前后和左右方向中移动。机器人手臂114可以包括可伸缩的多关节机器人臂。
56.在示例性实施方式中,各水平驱动单元、垂直驱动单元和旋转驱动单元中可以被配置为包括马达和具有同步带(timing belt)和滑轮的动力传输设备。
57.因此,转移机器人113可以将容器10装载到架子112上或从架子112转移容器10。
58.另一方面,能够以多个形式设置转移机器人113以更快地转移容器10。
59.吹扫单元120可以通过向包括于储料器110中的各个架子112供应吹扫气体来执行吹扫处理。
60.参照图3,吹扫单元120可包括供应喷嘴121、排出喷嘴122、供应管123、排出管124、气体供应单元125和流量控制器126。
61.供应喷嘴121分别设置在架子112上。各个供应喷嘴121具有与各个容器10的下表面接触的端部。例如,供应喷嘴121可利用当各个容器10挤压各个供应喷嘴121的端部时可能产生的压力来开启及关闭。即,当容器10中的一个被装载于架子112中的一个上时,供给喷嘴121中的一个可因当容器10中的一个挤压供给喷嘴121中的一个的端部时产生的挤压力而处于开启状态。另一方面,当容器10中的一个从架子112中的一个卸除时,挤压供给喷嘴121中的一个的端部的容器10的挤压力被释放,从而供应喷嘴121可变为关闭状态。
62.排出喷嘴122分别设置在各架子112上。排出喷嘴112可以与各个容器10的下表面的上部接触。例如,排出喷嘴122中的一个可以利用容器10中的一个的挤压力而于开启状态及关闭状态之间切换,该挤压力可于当容器中的一个挤压排出喷嘴122中的一个的上部时产生。
63.供应管123将吹扫单元120的供应喷嘴121连接至气体供应单元125。吹扫气体可以经由供应管123和供应喷嘴121供应至容器10中。
64.排出管124连接至吹扫单元120的排出喷嘴122。吹扫气体可以经由排出喷嘴122和排出管124而从容器10排出。
65.气体供应单元125可存储吹扫气体,并可经由供应管123将吹扫气体供应至容器10。吹扫气体的实例可包括氮气。
66.流量控制器126被设置在供应管123中的一个上且可控制流过供应管123的吹扫气体的流量。例如,可对各个供应管123设置多个流量控制器126,且各个流量控制器126可以控制要供应至多个架子112的吹扫气体的流量。
67.吹扫单元120能够以吹扫气体吹扫各个容器10的内部空间。因此,吹扫单元120可以去除残留在各个容器10的内部空间中的烟气或者可以防止氧化膜形成于容纳在各个容器10中的物体的表面上。
68.检查单元130可以通过检查吹扫单元120如何正确地吹扫各个架子112的内部空间来检查吹扫气体的吹扫质量。
69.检查单元130可包括压力传感器131、流量传感器133和判断器135。
70.压力传感器131可设置为邻近架子112中的一个。例如,压力传感器131可设置为邻近供应喷嘴121中的一个或可设置为邻近供应管123中的一个。压力传感器131可以测量流向架子112中的一个的吹扫气体的压力,以吹扫架子112中的一个。
71.流量传感器133可以设置为邻近架子112中的一个。例如,流量传感器133可设置为邻近供应喷嘴121中的一个或可设置为邻近供应管123中的一个。流量传感器133可以测量流向架子112中的一个的吹扫气体的流量,以吹扫架子中的一个。
72.判断器135连接至压力传感器131和流量传感器133两者,并判断压力传感器131和流量传感器133所分别测量的吹扫气体的压力和流量是否在正常范围内。
73.例如,当压力传感器131和流量传感器133所测量的吹扫气体的压力和流量相对于各个架子112是在正常范围内时,吹扫质量被判断为正常状态,如果压力和流量超出正常范围,则吹扫质量可被判断为异常状态。
74.控制单元140可以控制储料器110、吹扫单元120、检查单元130和显示单元150。
75.具体地,控制单元140可以控制储料器110交替地在执行吹扫处理的吹扫模式和不执行吹扫处理的正常模式之间切换储料器110。
76.此外,当储料器110在吹扫模式和正常模式之间交替地切换时,控制单元140可以控制吹扫单元120。当储料器110处于吹扫模式时,吹扫单元120供应吹扫气体至各个架子112来吹扫各个容器10的内部空间。当储料器110改变成正常模式下时,吹扫单元120仅将吹扫气体供应至各个架子112中,使得各个容器10的内部空间不会被吹扫。
77.当储料器110处于正常模式时,控制单元140可以控制检查单元130检查与各个架子112相关的吹扫质量。此外,控制单元140可以根据吹扫质量检查结果,快速地将储料器110从正常模式改变为吹扫模式。
78.此外,在将储料器110,尤其是架子112中的一个,从正常模式切换至吹扫模式时,可以不要求储料器110完全停止,从而储料器110可具有经优化的运行效率。
79.当储料器110从正常模式改变为吹扫模式时,可以不需要额外的吹扫质量检查处理,从而可以节省用于执行额外的吹扫质量检查处理的时间和成本。
80.同时,在正常模式下,即使容器10被装载在架子上,也不会对所有架子执行吹扫处理。
81.同时,储料器110的正常模式下不会对所有架子112中的被占用的架子执行吹扫处理,在这些架子上装载有容器10,从而吹扫单元120不会吹扫容器10。即,在正常模式下,吹扫单元120可以仅向所有架子112中的空架子供应吹扫气体。因此,在正常模式下不会对被占用的架子执行吹扫质量检查处理,而在正常模式下对空架子执行吹扫质量检查处理。即,检查单元110可以仅针对所有架子112中的空架子检查吹扫质量。
82.控制单元140可以控制储料器110的转移机器人113转移储料器110上位于被占用的架子上的容器10,以将被占用的架子转换为新的空架子。当从被占用的架子转换为新的空架子时,检查单元110可以对新的空架子检查吹扫质量。因此,检查单元110可以对所有的架子112依次执行吹扫质量检查处理。
83.检查单元130可以在预定时间段检查空架子的吹扫质量。如果在预定时间段过去后被占用的架子没有转换为新的空架子,则控制单元140控制转移机器人113将容器10从被占用的架子上转移,以将被占用的架子转换为新的空架子。
84.为了将占用的架子改变为新的空架子,在检查单元130已经完成针对空架子的吹扫质量检查处理的情况下,转移机器人113可以将被占用的架子的容器10转移至空架子,或通过装载口111转移至储料器110的外部。
85.控制单元140可将所有架子112分类为多个架子组。在各个架子组中,流量控制单元126控制流入包括于各个架子组中的架子112的吹扫气体的流量。此外,检查单元130可以在控制单元140的控制下,以规则的间隔对从架子组中选择的一个架子组执行吹扫质量检查处理。
86.控制单元140可以根据优先级标准从多个架子组中选择架子组。优先级标准能够以如下顺序设定,即包括于特定架子组中的架子的最大数量或特定架子组中的空架子的最大数量。
87.显示单元150根据控制单元140的控制信号显示储料器110的各个架子112是处于吹扫模式还是正常模式。显示单元150显示是否对架子112中的一个执行吹扫质量检查处理,以及检查结果为何。另外,显示单元150可以将被判定为吹扫质量异常的架子112标记为不能使用。因此,操作者可以通过监控显示单元150而容易且准确地检查储料器110的状态。
88.图5是示出具有本发明的示例性实施方式的存储载具的方法的流程图。图6是示出图5中检查吹扫质量的步骤的流程图。图7是示出针对图6中的空架子检查吹扫质量的步骤的流程图。
89.参照图1至图3和图5,根据存储载具的方法的示例性实施方式,在正常模式下针对所有架子112执行吹扫质量检查处理以存储容器10,而不对包括于储料器110中的所有架子112执行吹扫处理(步骤s100)。
90.在正常模式下,吹扫气体仅被供应至包括于储料器110中的架子112中,而不被供应至容器10中。在执行吹扫质量检查处理时,对各个架子112供应吹扫气体以检查各个架子112的吹扫质量。
91.为了防止吹扫单元120在正常模式下吹扫容器10,吹扫单元120不将吹扫气体供应至架子112中装载有容器10的被占用的架子中。即,在正常模式下,吹扫气体可以仅被供应至所有架子112中的空架子。因此,在正常模式下不会针对被占用的架子执行吹扫质量检查处理,而检查单元130仅对各个空架子检查吹扫质量。
92.具体地,参照图6,为了检查各个架子112的吹扫质量,首先,检查架子112中的各个空架子的吹扫质量(步骤s110)。
93.在架子112中,被装载来占据被占用的架子的容器10被转移,以将被占用的架子转换为新的空架子s120。
94.具体地,可以在预定时间段内针对空架子执行吹扫质量检查处理。当被占用的架子在预定时间段内未被改变为新的空架子时,储料器110的转移机器人113将占据被占用的架子的容器10转移,以将被占用的架子转换为新的空架子。
95.为了将被占用的架子转换为新的空架子,储料器110的转移机器人113将容器10从被占用的架子转移到吹扫质量检查处理已结束完成的空架子。除此之外,转移机器人113可
经由装载口111将容器10从被占用的架子转移至储料器110的外部。
96.然后,针对新的空架子检查吹扫质量(步骤s130)。
97.当针对各个架子112执行吹扫质量检查处理时,架子被分类为多个架子组。在预定的时间段内对包括于架子组之中的被选定的架子组中的架子执行吹扫质量检查处理。
98.例如,各个流量控制器126可以控制要供应至包括于各个架子组中的所有架子的吹扫气体。
99.根据优先级标准,依次选择各个架子组以对架子组中的一个供应吹扫气体。优先级标准以如下顺序设定,即构成特定架子组的架子的最大数量或特定架子组中的空架子的最大数量。
100.参照图3和图7,以下描述检查空架子的吹扫质量的处理(步骤s110)。
101.首先,将用于执行吹扫的吹扫气体供应至空架子(步骤s111)。
102.具体地,吹扫气体可以从气体供应单元125经由供应管123和供应喷嘴121供应至空架子。
103.测量供应至空架子的吹扫气体的压力和流量两者(步骤s112)。
104.详细地,压力传感器131测量供应至各个架子112的吹扫气体的压力,且流量传感器133测量供应至各个架子112的吹扫气体的流量。
105.当空架子上测得的吹扫气体的压力和流量值两者都在正常范围内时,判断各空架子的吹扫质量正常,而当压力值及流量值超出正常范围时,则判断各空架子的吹扫质量异常(步骤s113)。
106.针对新的空架子s130的吹扫质量检查处理与针对空架子的吹扫质量检查处理(步骤s110)基本相同。
107.当各个架子112的吹扫质量检查过程完成时,将吹扫质量检查结果提供至控制单元140。
108.储料器110从正常模式改变为吹扫模式s200。在吹扫模式下,根据各别架子的吹扫质量检查结果,对架子所支承的载具进行吹扫处理。
109.只有吹扫质量被判断为正常的架子112可以从正常模式改变为吹扫模式。由于吹扫质量被判断为异常的各架子112无法各自正确地吹扫容器10,因此吹扫质量被判断为异常的各架子112不会改变为吹扫模式,从而架子可保持正常模式或是不可利用。
110.由于利用了各个架子112的吹扫质量检查结果,所以当将储料器110从正常模式改变为吹扫模式时可以不需要停止储料器100。因此,储料器110可具有经优化的运行效率。
111.此外,储料器110可以快速地从正常模式切换至吹扫模式而无需额外的吹扫质量检查。因此,可以节省吹扫质量检查所需的时间和成本。
112.根据本发明的示例性实施方式中的存储容器的装置和方法,可以通过使用由检查单元进行的吹扫质量检查结果,于储料器处于正常模式时将储料器从正常模式快速地改变为吹扫模式。由于储料器不需要停止以进行吹扫质量检查处理,因此储料器可具有经优化的运行效率。
113.此外,当将储料器从正常模式改变为吹扫模式时,可以省略额外的吹扫质量检查处理,从而可以节省吹扫质量检查处理所需的时间和成本。
114.虽然已经参考具体实施方式描述了本发明的示例性实施方式,但是它们不限于
此。因此,本领域技术人员将容易理解,在不脱离由所附权利要求限定的本公开的精神和范围的情况下,可以对其进行各种修改和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。