1.本发明涉及自动化设备技术领域,特别是涉及一种实现闪光灯装配固化加工的自动化装置。
背景技术:
2.随着科技发展,出于人工装配的效率及出错率的考虑,同时也考虑到人工成本的提高,企业越来越多地考虑到以自动化装配代替传统的人工装配,而本技术所针对解决的就是闪光灯在机壳中进行自动化装配的问题。
3.闪光灯在装配到机壳的组装工艺中,首先组装需要高精度的操作,因此需要熟练工才行,且稍有不慎就可能造成不良品的发生。在装配到位后,闪光灯是通过光刻胶以及uv曝光使得其固化粘牢在机壳上的,这就更给人工操作提高了难度,不但良品率低下,生产效率低下,生产成本高,很难满足市场需求,而且工艺本身的局限性导致人工操作过程中存在一定的安全性,影响着工人的安全。
技术实现要素:
4.本发明目的是要提供一种实现闪光灯装配固化加工的自动化装置,其不但能够提高生产效率,还能够提高操作安全性、舒适性,更好地满足生产需求。
5.为达到上述目的,本发明采用的技术方案是:本发明提供了一种实现闪光灯装配固化加工的自动化装置,包括壳体输送线、六轴机器人、点胶机、闪光灯装配固化机,所述六轴机器人设置于所述点胶机与所述闪光灯装配固化机之间,六轴机器人抓取所述壳体输送线上的机壳在所述点胶机与所述闪光灯装配固化机之间周转,所述点胶机中设置有对机壳上闪光灯安装点位处进行点胶的胶枪,所述闪光灯装配固化机包括移载模组、供料模组、组装模组、uv固化模组以及出料模组,所述供料模组处装载有待装配的闪光灯,所述组装模组设置于所述供料模组的侧面并且组装模组处设置有对机壳进行定位放置的载具,所述移载模组跨设于所述供料模组与所述组装模组的上方,所述uv固化模组设置于所述组装模组的上方并对组装后的闪光灯的点胶处uv光照固化,所述出料模组设置于所述组装模组的出料端,并且所述出料模组跨设于所述壳体输送线及所述组装模组的上方。
6.对于上述技术方案,申请人还有进一步的优化措施。
7.可选地,所述组装模组包括直线传动机构、与直线传动机构配合固定的载具,所述载具沿所述直线传动机构横移传动,所述载具表面具有对机壳进行定位的治具板。
8.进一步地,所述载具上还设有气动压紧机构,所述气动压紧机构采用的是气动升降的多个压紧块,所述多个压紧块中具有至少两个压紧块是环绕所述治具板的边缘设置的,并且具有至少一个压紧块是通过l形的升降臂设置于治具板的上方。
9.进一步地,所述气动压紧机构还包括气动升降的保压脚,所述保压脚设置于治具板的上方并对应于机壳上点胶固定闪光灯的位置设置。
10.更进一步地,所述载具表面设置有横推气缸,所述横推气缸的动力轴与所述治具板固定连接,所述治具板与所述载具是独立设置的。
11.可选地,所述移载模组包括跨设于所述供料模组与所述组装模组两者上方的龙门架、设于龙门架顶部的直线电机、与龙门架滑动配合的升降机构、设于升降机构处的抓取平台,其中,抓取平台在所述升降机构处竖直平移,用于抓取供料模组处的闪光灯,并在所述直线电机的驱动下横移送至组装模组处。
12.进一步地,所述抓取平台的侧面设置有上ccd检测机构,用于对组装模组处的机壳位置进行识别检测。
13.可选地,所述供料模组的侧面设置有下ccd检测机构,用于对所述移载模组所抓取的闪光灯进行识别检测。
14.可选地,所述uv固化模组包括紫外灯,所述紫外灯通过门架固定于所述组装模组的上方。
15.可选地,在所述点胶机与闪光灯装配固化机之间还设置有点胶ng输送线。
16.由于上述技术方案运用,本发明与现有技术相比具有下列优点:本发明的实现闪光灯装配固化加工的自动化装置,其能够针对闪光灯装配过程的特点,设计出了从机壳上料、点胶、闪光灯抓取移载、检测、组装、uv固化到最终出料的自动化装配结构,满足了人员和设备的高效结合,弥补了工艺本身的缺陷,增加了人员操作过程中的安全性、舒适性,同时提高了装配效率以及最终的良品率。
附图说明
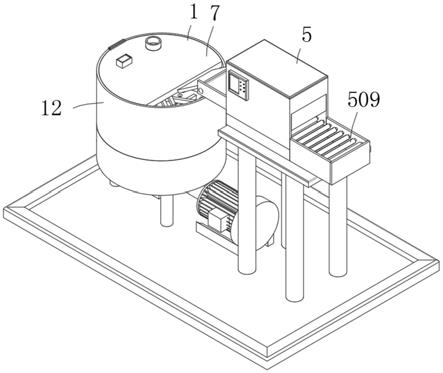
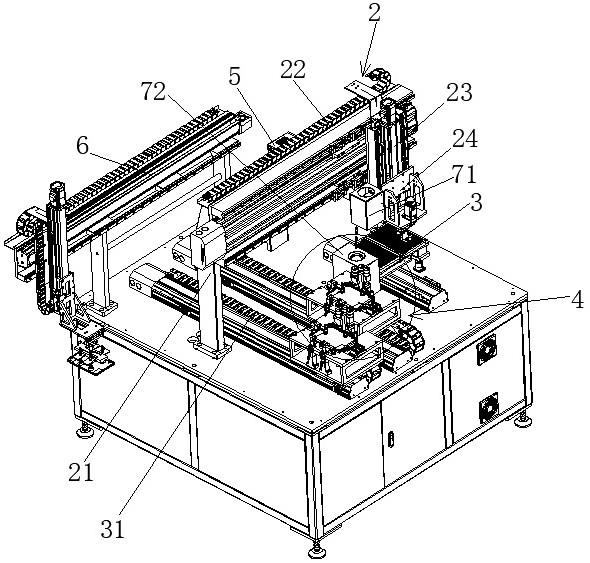
17.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:图1是根据本发明一个实施例的实现闪光灯装配固化加工的自动化装置的整体结构示意图;图2是图1所示自动化装置中的闪光灯装配固化机的结构示意图;图3是图2所示闪光灯装配固化机中的局部放大结构示意图。
18.其中,附图标记说明如下:11、壳体输送线,12、六轴机器人,13、点胶机,14、点胶ng输送线,15、闪光灯装配固化机;2、移载模组,21、龙门架,22、直线电机,23、升降机构,24、抓取平台;3、组装模组,,31、直线传动机构,32、载具,33、治具板,34、横推气缸,35、压紧块,36、保压脚;4、供料模组;5、uv固化模组;6、出料模组;71、上ccd检测机构,72、下ccd检测机构。
具体实施方式
19.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
21.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
22.本实施例描述了一种实现闪光灯装配固化加工的自动化装置,如图1所示,包括壳体输送线11、六轴机器人12、点胶机13、闪光灯装配固化机15,所述六轴机器人12设置于所述点胶机13与所述闪光灯装配固化机15之间,六轴机器人12抓取所述壳体输送线11上的机壳在所述点胶机13与所述闪光灯装配固化机15之间周转,所述点胶机13中设置有对机壳上闪光灯安装点位处进行点胶的胶枪,而所述闪光灯装配固化机15则完成闪光灯在机壳点胶位置的装载、保压乃至uv固化。另外,在所述点胶机13与闪光灯装配固化机15之间还设置有点胶ng输送线14,对于点胶未成功的机壳可通过六轴机器人12将其抓取出来,放置到该条点胶ng输送线14上,然后送出。
23.如图2、图3所示,本实施例的所述闪光灯装配固化机15包括移载模组2、供料模组4、组装模组3、uv固化模组5以及出料模组6,所述供料模组4处装载有待装配的闪光灯,所述组装模组3设置于所述供料模组4的侧面并且组装模组3处设置有对机壳进行定位放置的载具32,所述移载模组2跨设于所述供料模组4与所述组装模组3的上方,所述uv固化模组5设置于所述组装模组3的上方并对组装后的闪光灯的点胶处uv光照固化,所述出料模组6设置于所述组装模组3的出料端,并且所述出料模组6跨设于所述壳体输送线11及所述组装模组3的上方,出料模组6通过真空吸盘抓取组装模组3上加工完成后的机壳,然后通过横移驱动机构将机壳移出放置在壳体输送线11上。
24.具体说来,所述组装模组3包括直线传动机构31、与直线传动机构31配合固定的载具32,所述载具32沿所述直线传动机构31横移传动,所述载具32表面具有对机壳进行定位的治具板33。所述载具32表面设置有横推气缸34,所述横推气缸34的动力轴与所述治具板33固定连接,所述治具板33与所述载具32是独立设置的,横推气缸34能够推动治具板33在载具32表面进行位置调整,使得装配闪光灯的移载模组2与后续的保压脚36之间进行避让。这里的直线传动机构31可采用直线电机22,也可以采用滚珠丝杠、气缸结合导轨的形式,已能够实现载具32的横移即可。
25.所述载具32上还设有气动压紧机构,能够保证治具板33在载具32上的有效限位同时保证机壳在治具板33内的保持稳定,便于装配的同时提高装配的精准性和稳定性。所述气动压紧机构采用的是气动升降的多个压紧块35,所述多个压紧块35中具有至少两个压紧块35是环绕所述治具板33的边缘设置的,并且具有至少一个压紧块35是通过l形的升降臂设置于治具板33的上方。
26.另外,所述气动压紧机构还包括气动升降的保压脚36,所述保压脚36设置于治具板33的上方并对应于机壳上点胶固定闪光灯的位置设置,可采用l形的连接架与气缸相连的形式,也可以采用其他结构,能够保证保压脚36位于机壳上方,横移气缸横推治具板33后能够将机壳上的闪光灯装配位置送到保压脚36下方机壳。保压脚36的设置能够保证紫外灯在进行光照即uv光照处理时,闪光灯与机壳间的稳定贴合且不会产生晃动,提高最终的良品率。
27.而所述移载模组2包括跨设于所述供料模组4与所述组装模组3两者上方的龙门架21、设于龙门架21顶部的直线电机22、与龙门架21滑动配合的升降机构23、设于升降机构23处的抓取平台24,其中,抓取平台24在所述升降机构23处竖直平移,用于抓取供料模组4处的闪光灯,并在所述直线电机22的驱动下横移所述升降机构23进而将抓取平台24处的闪光灯送至组装模组3处。
28.为了能够实现闪光灯抓取后的检测,在所述供料模组4的侧面设置有下ccd检测机构72,用于对所述移载模组2所抓取的闪光灯进行识别检测。另外,为了能够实现对于下方治具板33上机壳到位状态的检测,在所述抓取平台24的侧面设置有上ccd检测机构71,用于对组装模组3处的机壳位置进行识别检测,识别是否存在机壳且装配位置是否准确,在装配前完成识别检测,防止不良品的发生。
29.在本实施例中,存在两组组装模组3,也就是双工位进行组装,那么采用上述的上ccd检测机构71就能够在进行闪光灯抓取检测(下ccd检测机构72处完成)的同时完成对第一组装模组3处机壳的检测,而在移载模组2将闪光灯移动到第一组装模组3处进行上料组装时,此时上ccd检测机构71则完成对于另一侧的第二组装模组3处机壳状态的检测,使得整体结构布置更为合理,提高组装效率。即使是采用单组组装模组3进行生产,另一组组装模组3也可以作为备用线,提高了产线的有效运行时间。
30.所述uv固化模组5包括紫外灯,所述紫外灯通过门架固定于所述组装模组3的上方。这里的紫外灯也可以直接固定在移载模组2中的龙门架21上,外部可通过罩体封闭,将上述的移载模组2、供料模组4、组装模组3、uv固化模组5以及出料模组6等主体等主体封装在其中,防止紫外光外泄,也提高紫外光的光照集中性,提高uv固化效率。
31.本发明的实现闪光灯装配固化加工的自动化装置,其能够针对闪光灯装配过程的特点,设计出了从机壳上料、点胶、闪光灯抓取移载、检测、组装、uv固化到最终出料的自动化装配结构,满足了人员和设备的高效结合,弥补了工艺本身的缺陷,增加了人员操作过程中的安全性、舒适性,同时提高了装配效率以及最终的良品率。
32.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。