1.本发明涉及隧道灯养护技术领域,尤其涉及一隧道灯自动清洗方法。
背景技术:
2.现有高速公路隧道灯具养护作业采用人工清洗的方式,养护作业过程中,作业人员通过高空作业车升降的方式进行高速公路隧道灯具清洗。由于高速公路隧道内不仅仅有隧道照明设备,还有其它附属设施,如:风机、可变情报板、监控摄像机为等。当人工清洗高速公路隧道灯具时,这些附属设施就成为了清洗过程中的障碍物,清洗人员需将高空作业车降至最低处,避开障碍物后在重新升起高空作业车进行清洗后续隧道灯具。高速公路隧道灯具养护作业中高速隧道长度较长,需要避开的障碍物也越多,影响灯具清洗作业效率,且人工清洗隧道灯具需要的作业人员较多,影响高速公路养护作业的安全性。
技术实现要素:
3.本发明的主要目的提供一种隧道灯自动清洗方法,旨在提高隧道灯自动清洗效率及作业过程中的安全性。
4.为实现上述目的及其他相关目的,本发明技术方案如下:
5.一种隧道灯自动清洗方法,包括:
6.提供一自动驾驶车辆,所述车辆为自动驾驶车辆,所述车辆上配置有用于进行隧道灯清洗的自动清洗装置,所述自动清洗装置包括清洗动力机构、清洗系统及隧道灯追踪系统,其中,所述清洗系统包括设置于所述清洗动力机构的末端的清洗组件,所述清洗组件包括清洗喷头,所述隧道灯追踪系统用于对隧道内待清洗的隧道灯进行跟踪定位;
7.启动车辆,使车辆自动沿隧道自动驾驶,
8.开启隧道灯追踪系统;
9.高度校准工序,根据所述隧道灯追踪系统采集的数据调整驱动所述清洗动力机构动作,使所述清洗喷头的高度与相应隧道灯高度一致;
10.清洗控制工序,根据所述隧道灯追踪系统采集的数据计算各隧道灯之间的实际间距;若所述实际间距小于或等于预设间距,则采用连续清洗模式,使清洗喷头以预设喷淋速度连续向隧道灯所在方向喷射清洗蒸汽;若所述实际间距大于预设间距,则采用间断定位清洗模式,使清洗喷头仅在隧道灯距离隧道灯预设清洗距离范围内向隧道灯所在方向喷射清洗蒸汽,其余清洗距离范围内停止喷射清洗蒸汽。
11.可选的,所述实际间距为10m。
12.可选的,当采用连续清洗模式时,控制所述车辆沿隧道匀速行驶。
13.可选的,所述车辆的行驶速度为5km/h。
14.可选的,当采用间断定位清洗模式时,将车辆的位置分为清洗位置和非清洗位置,根据隧道灯追踪系统采集的数据判断所述车辆所处位置,所述清洗位置位于相邻两隧道灯之间,所述清洗位置与下一待清洗的隧道灯的距离在所述预设清洗距离范围内,
15.所述车辆的具有基准行驶速度,若所述车辆处于所述非清洗位置,提高所述车辆的形势速度,使车辆处于任一非清洗位置时的行驶速度高于所述基准行驶速度。
16.可选的,若所述车辆处于所述清洗区段,降低所述车辆的行驶速度,使车辆处于任一清洗位置时的行驶速度低于所述基准行驶速度。
17.可选的,所述车辆在所述非清洗位置的行驶速度大于5km/h,所述车辆在所述清洗位置的行驶速度小于5km/h。
18.可选的,所述清洗系统还包括高温高压清洗机和连接管路,所述高温高压清洗机、所述连接管路和所述清洗喷头依次连接,所述车辆内设置有蒸汽检测工位,所述蒸汽检测工位旁对应设置有蒸汽检测采集组件,所述隧道灯的清洗方法还包括:
19.启动高温高压清洗机,
20.蒸汽检测工序,待高温高压清洗机启动预设时间后,控制所述清洗动力机构动作,使所述清洗喷头移动至所述蒸汽检测工位,所述清洗喷头对准所述蒸汽采集组件,根据所述蒸汽采集组件采用的数据判断清洗喷头喷出的清洗蒸汽是否达标,若达标则开启所述隧道灯追踪系统,并进入所述高度校准工序。
21.可选的,所述车辆包括底盘及车厢,所述清洗动力机构设置于所述车厢内,所述车厢顶部设置有天窗,所述清洗动力机构包括举升装置及六轴机械臂,所述举升装置上设置有安装平台,所述六轴机械臂安装在所述安装平台上,所述清洗组件设置于所述六轴机械臂的末端;所述隧道灯自动清洗方法还包括:
22.控制所述天窗打开;
23.在蒸汽检测工序前,控制所述举升装置动作,使所述安装平台上升至预设位置;
24.在蒸汽检测工序过程中或在高度校准工序中,控制所述六轴机械臂动作,使清洗碰头随所述六轴机械臂伸出所述天窗;
25.清洗完毕后,控制所述六轴机械臂动作,使所述六轴机械臂及清洗喷头经所述天窗退回至所述车厢内。
26.可选的,所述车辆上还设置有避障雷达,所述隧道灯自动清洗方法还包括:
27.根据所述避障雷达的数据判断前方是否有障碍物;若有,则控制所述六轴机械臂动作,使清洗喷头的高度随之降低,避开所述障碍物后,控制所述六轴机械臂动作,使清洗喷头高度复位;若无,则保持所述清洗喷头的高度不变。
28.本发明的隧道灯自动清洗方法,对隧道灯进行自动清洗,不仅清洗效率相较人工清洗的方式更高,且安全性更高;并且,本发明中,根据在清洗控制工序可以选用连续清洗模式和间断定位清洗模式,能够提高清洗系统中清洗蒸汽利用率,降低能耗。
附图说明
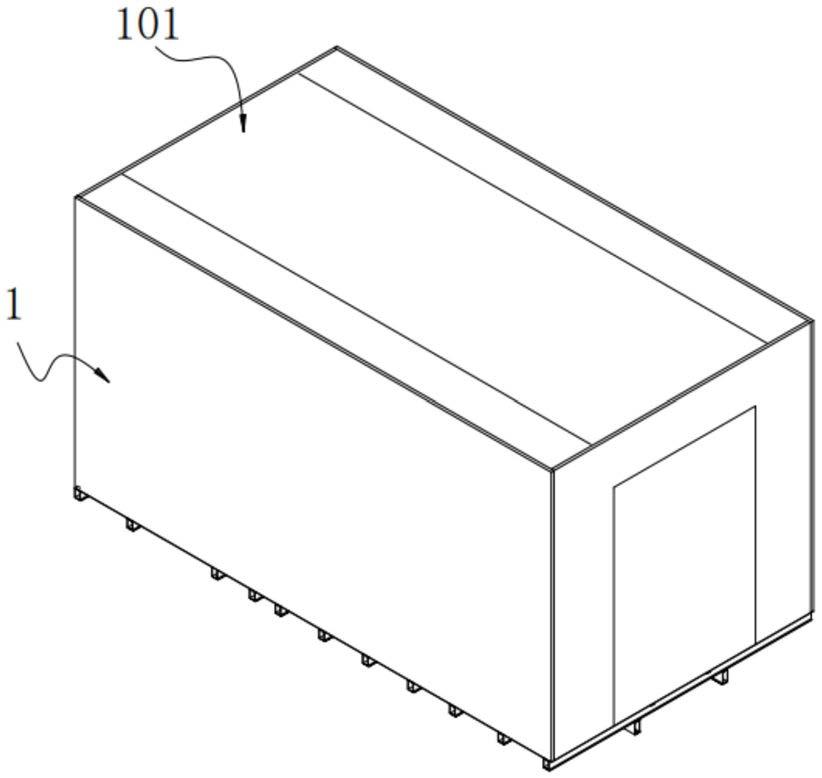
29.图1显示为车辆上车厢的外部结构简图;
30.图2显示为六轴机械臂伸出天窗时,车厢内部的结构示意图;
31.图3显示为间断定位清洗模式下,清洗位置和非清位置的分区示意图。
32.实施例中附图标记说明包括:
33.车厢1、天窗101;
34.举升装置210、安装平台210a、六轴机械臂220、清洗组件230、清洗喷头231、高温高
压清洗机310。
具体实施方式
35.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
36.应当理解的是,本发明能够以不同行驶实施,而不应当解释为局限于这里提出的实施例。相反地,提供这些实施例将使公开彻底和完全,并且将本发明的范围完全地传递给本领域技术人员。在附图中,自始至终相同附图标记表示相同的组件。
37.本发明的隧道灯自动清洗方法,包括:
38.s000、提供一车辆,所述车辆为自动驾驶车辆,所述车辆上配置有用于进行隧道灯清洗的自动清洗装置,结合参见图1、图2,所述自动清洗装置包括清洗动力机构、清洗系统及隧道灯追踪系统,其中,所述清洗系统包括设置于所述清洗动力机构的末端的清洗组件230,所述清洗组件230包括清洗喷头231,所述隧道灯追踪系统用于对隧道内待清洗的隧道灯进行跟踪定位;
39.s100、启动车辆,使车辆自动沿隧道自动驾驶,
40.s400、开启隧道灯追踪系统;
41.s600、高度校准工序,根据所述隧道灯追踪系统采集的数据调整驱动所述清洗动力机构动作,使所述清洗喷头231的高度与相应隧道灯高度一致;
42.s800、清洗控制工序,根据所述隧道灯追踪系统采集的数据计算各隧道灯之间的实际间距;若所述实际间距小于或等于预设间距,则采用连续清洗模式,使清洗喷头231以预设喷淋速度连续向隧道灯所在方向喷射清洗蒸汽;若所述实际间距大于预设间距,则采用间断定位清洗模式,使清洗喷头231仅在隧道灯距离隧道灯预设清洗距离范围内向隧道灯所在方向喷射清洗蒸汽,其余清洗距离范围内停止喷射清洗蒸汽。
43.本发明的隧道灯清洗方法利用配置有自动清洗装置的自动驾驶车辆清洗隧道灯,能够实现隧道灯的自动清洗,无需人工操作;且在清洗控制工序s500中,根据各隧道等之间的实际距离选用清洗模式,既能够保证清洗效果,也能避免清洗系统中的清洗蒸汽被浪费,提高了清洗蒸汽利用率,且能够降低能耗。
44.在一些实施例中,所述实际间距为10m,若实际间距小于或等于10m,则采用连续清洗模式,若实际间距大于10m,则采用间断定位清洗模式。
45.在一些实施例中,当采用连续清洗模式时,控制所述车辆沿隧道匀速行驶。
46.在一些实施例中,车辆的行驶速度为5km/h。此速度下,隧道灯能够被清洗得较为干净,且此速度下,能够保持一定的清洗效率。
47.在一些实施例中,当采用间断定位清洗模式时,将车辆的位置分为清洗位置和非清洗位置,根据隧道灯追踪系统采集的数据判断车辆所处位置,清洗位置位于相邻两隧道灯之间,清洗位置与下一待清洗的隧道灯的距离在预设清洗距离范围内,其中,该车辆的具有基准行驶速度v0,若所述车辆处于所述非清洗位置,提高所述车辆的形势速度,使车辆处于任一非清洗位置时的行驶速度高于所述基准行驶速度,有利于提高清洗效率。图3中,实
心圆作为隧道灯,车辆沿箭头方向行驶,m区域的任意位置均属于非清洗位置,n区域的任意位置均属于清洗位置。
48.在一些实施例中,若所述车辆处于所述清洗区段,降低所述车辆的行驶速度,使车辆处于任一清洗位置时的行驶速度低于所述基准行驶速度,有利于使隧道灯清洗效果更佳。
49.在一些实施例中,连续清洗模式下的清洗速度即为所述基准行驶速度,所述车辆在所述非清洗位置的行驶速度大于5km/h,所述车辆在所述清洗位置的行驶速度小于5km/h。
50.在一些实施例中,清洗系统还包括高温高压清洗机310和连接管路,高温高压清洗机310、连接管路和清洗喷头231依次连接,车辆内设置有蒸汽检测工位,蒸汽检测工位旁对应设置有蒸汽检测采集组件,隧道灯的清洗方法还包括:
51.s200、启动高温高压清洗机310;
52.s300、蒸汽检测工序,待高温高压清洗机310启动预设时间后,控制所述清洗动力机构动作,使所述清洗喷头231移动至所述蒸汽检测工位,所述清洗喷头231对准所述蒸汽采集组件,根据所述蒸汽采集组件采用的数据判断清洗喷头231喷出的清洗蒸汽是否达标,若达标则开启所述隧道灯追踪系统,并进入所述高度校准工序。
53.这种清洗系统,使清洗喷头231不仅能够提供高温高压蒸汽,提高清洗效果,并且,通过设置蒸汽检测工位,在清洗工序前能够检测清洗蒸汽是否达标,提高清洗过程的可靠性,能够保证清洗效果。
54.具体的,上述的“蒸汽采集组件采集的数据”可以指蒸汽的温度、蒸汽的压力等参数数据,对应的蒸汽采集组件可以是温度传感器、压力传感器等。
55.在一些实施例中,结合参见图1、图2,所述车辆包括底盘及车厢1,所述清洗动力机构设置于所述车厢1内,所述车厢1顶部设置有天窗101,所述清洗动力机构包括举升装置210及六轴机械臂220,所述举升装置210上设置有安装平台210a,所述六轴机械臂220安装在所述安装平台210a上,所述清洗组件230设置于所述六轴机械臂220的末端;所述隧道灯自动清洗方法还包括:
56.b100、控制所述天窗101打开;
57.b200、在蒸汽检测工序(s300)前,控制所述举升装置210动作,使所述安装平台210a上升至预设位置;
58.b300、在蒸汽检测工序(s300)过程中或在高度校准工序(s600)中,控制所述六轴机械臂220动作,使清洗碰头随所述六轴机械臂220伸出所述天窗101;在实际实施过程中,若果蒸汽检测位可以位于车厢1外,也可以位于车厢1内,如果位于车厢1内,则在蒸汽检测工序(s300)过程中通过执行b300步骤,若蒸汽检测位设置于车厢1外,则在高度校准工序(s600)过程中执行b300步骤;
59.b400、清洗完毕后,控制所述六轴机械臂220动作,使所述六轴机械臂220及清洗喷头231经所述天窗101退回至所述车厢1内。
60.这种带天窗101的车厢1结构这种隧道灯自动清洗方式,能够在清洗完成后将整个动作机构及清洗组件230都收纳会车厢1内,能够对动作机构和清洗组件230等起到防护作用,有利于提高使用寿命。
61.在一些实施例中,所述车辆上还设置有避障雷达,所述隧道灯自动清洗方法还包括:
62.c110、根据所述避障雷达的数据判断前方是否有障碍物;
63.若有,则执行步骤c120,即控制所述六轴机械臂220动作,使清洗喷头231的高度随之降低,避开所述障碍物后,控制所述六轴机械臂220动作,使清洗喷头231高度复位;
64.若无,则保持所述清洗喷头231的高度不变。
65.此种隧道灯自动清洗方法,利用避障雷达采集数据,能够提高隧道灯清洗过程中的安全性。
66.在本发明描述中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。
67.本发明的描述中,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、组件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、组件、部件和/或组的存在或添加。
68.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。