移动ct卒中救护车及其警示控制装置和控制其警示灯和电控门锁的方法
技术领域
1.本发明涉及警示控制装置,尤其涉及用于移动ct卒中救护车的警示控制装置。
背景技术:
2.移动ct卒中救护车是一种将神经症状学检查、ct诊断和静脉溶栓治疗集成为一体的救护车,其上配设有移动ct机和相关的检验仪器。移动ct机是一种具有辐射的医疗设备,在对患者进行ct扫描时要求与治疗无关的人员不能停留在救护舱内,甚至不能停留在救护车的附近。为此,通常在救护车外部设置有警示灯以及相关的警示标识,并且同时要求在移动ct机执行扫描作业的过程中非紧急情况不能打开车门。但在目前的移动ct卒中救护车中,警示灯和车门门锁均由各自的开关独立控制且与移动ct机的运行状态并无关联,这样就存在工作人员忘记开启警示灯以及外部人员错误地打开车辆门锁的风险,由此会导致车内辐射射线泄露到周围环境中并对周围人员造成损伤。
技术实现要素:
3.为了解决上述问题,本发明提供一种用于移动ct卒中救护车的警示控制装置和包括该警示控制装置的移动ct卒中救护车以及该警示控制装置对警示灯和电控门锁的控制方法。
4.本发明公开了一种移动ct卒中救护车的警示控制装置,其中所述救护车包括驾驶舱和救护舱,所述救护舱具有至少一个车门,在所述车门上安装有电控门锁,在所述救护舱的内部布置有移动ct机和借助于供电线路对所述移动ct机供电的电源,在所述救护车的外部设有警示灯,所述警示控制装置包括电量综合采集模块和智能控制器。其中电量综合采集模块被布置在所述供电线路上以对所述移动ct机的耗电功率p进行测量。智能控制器被设计为从所述电量综合采集模块处接收耗电功率p并通过将该耗电功率p与预设阈值范围相比较来控制所述电控门锁的锁定和解锁以及所述警示灯的开启和关闭,其中所述预设阈值范围与所述移动ct机的不同作业状态相关联。上述警示控制装置借助于电量综合采集模块和智能控制器将救护车的车门的解锁或开锁和警示灯的开启和关闭与移动ct机的运行状态相关联,从而实现三者的联动控制,极大地降低了移动ct机运行时对医护人员或周围人员造成损伤的风险。
5.在一个实施例中,所述移动ct机被设计成当在p=0w时处于关机状态,当540w<p≤660w时处于待机状态,当900w<p≤1100w时处于扫描预备状态,当1440w<p≤1760w时处于扫描曝光状态,并且所述智能控制器被设计为当p<540w时控制所述电控门锁解锁且控制所述警示灯关闭,当540w≤p<900w时控制所述电控门锁解锁且控制所述警示灯开启,当p≥900w时控制所述电控门锁锁定且控制所述警示灯开启。
6.优选地,所述警示控制装置还包括设置在所述驾驶舱的内部的紧急开锁按钮,所述紧急开锁按钮被设计为与所述电控门锁相关联以在被启动时控制所述电控门锁解锁。
7.优选地,所述警示控制装置还包括从所述救护舱的内部设置在车门上的机械解锁手柄,所述机械解锁手柄被设计为与所述电控门锁相关联以在被启动时控制所述电控门锁解锁。
8.优选地,在所述电量综合采集模块上设置数字接口,所述智能控制器与所述数字接口通信连接。
9.本发明还提供了一种采用上述移动ct卒中救护车的警示控制装置来控制设置在所述救护车上的警示灯和电控门锁的方法,该方法包括以下步骤:步骤1:提供并安装电量综合采集模块以便用该电量综合采集模块测量所述移动ct机的耗电功率p;步骤2:提供用于从所述电量综合采集模块处接收耗电功率p的智能控制器;步骤3:由该智能控制器将收到的耗电功率p与预设阈值范围相比较;步骤4:由所述智能控制器根据耗电功率p与预设阈值范围的比较结果向所述警示灯和所述电控门锁分别发送指令,以控制所述电控门锁的锁定和解锁以及所述警示灯的开启和关闭。
10.本发明还提供了一种移动ct卒中救护车,其包括驾驶舱和救护舱,所述救护舱具有至少一个车门,在所述车门上安装有电控门锁,在所述救护舱的内部布置有移动ct机和借助于供电线路对所述移动ct机供电的电源,在所述救护车的外部设有警示灯,所述救护车还包括上述移动ct卒中救护车的警示控制装置。
附图说明
11.图1是救护车的右视图和后视图;
12.图2是移动ct机在不同作业状态下所对应的耗电功率p的示意图;
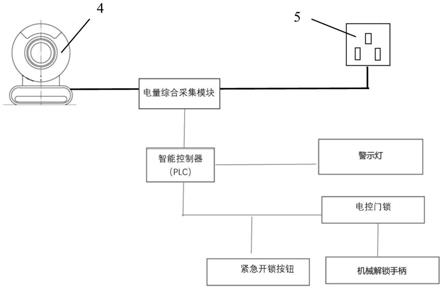
13.图3是警示控制装置的工作原理示意图。
14.附图标记列表
15.1.驾驶舱;2.救护舱;3.车门;4.移动ct机;5.电源;6.警示灯;7.警示标识。
具体实施方式
16.现参考附图,详细说明本发明所公开的移动ct卒中救护车警示控制装置的示意性方案。尽管提供附图是为了呈现本发明的一些实施方式,但附图不必按具体实施方案的尺寸绘制。附图中的部分构件可在不影响技术效果的前提下根据实际需求进行位置调整。
17.在下文中被用于描述附图的某些方向性术语,将被理解为具有其正常含义并且指正常看附图时所涉及的那些方向。除另有指明,本说明书所述方向性术语基本为本领域技术人员所理解的常规方向。
18.本文所公开的警示控制装置主要应用于移动ct卒中救护车。如图1所示,该救护车包括驾驶舱1和救护舱2,该救护舱2包括车门3。其中救护舱2可例如包括后车门、左车门和右车门中的一个或多个,在本文中车门为上述门的总称,下文所述的电控门锁可被安装在后车门、左车门和右车门中的一个或多个上。移动ct机4被可分离地放置在救护舱2的底板上且在被锁定时无法相对于救护舱2的底板移动。在救护舱2内设置电源5,其可包括供移动ct机4专用的插座,移动ct机4借助于供电线路与该插座电连接。
19.在车门3上安装有电控门锁(未示出),该电控门锁能够在对应控制装置的控制下被锁定和解锁以使车门3关闭和打开。电控门锁的具体构型和工作原理在现有技术中已知,
在本文中不再赘述。在救护车(尤其是救护舱2)的外部设置有至少一个警示灯6,该警示灯6也可在对应控制装置的控制下被开启和关闭以亮起和熄灭。由图1可见,该警示灯6可被布置在救护舱2的后舱板和右舱板的顶缘处,当然未示出的左舱板上也可设置该警示灯6。另外,还可在救护舱2的外部设置警示标识7,以提醒周围人员不要随便靠近该救护车。
20.不同型号的移动ct机4通常均具有4种作业状态,即关机状态、待机状态、扫描预备状态和扫描曝光状态,其中该移动ct机4在不同的作业状态下将具有不同的耗电功率,人们可根据耗电功率的变化准确判断移动ct机4当前的作业状态。
21.表1
22.步骤序号作业状态耗电功率警示灯开启状态电控门锁状态1关机0w关闭解锁2待机600w
±
10%开启解锁3扫描预备1000w
±
10%开启锁定4扫描曝光1600w
±
10%开启锁定
23.表1以小型16层多功能移动ct机(mct-i型)为例示出了其在不同作业状态下的对应耗电功率以及警示控制装置在不同作业状态对警示灯和电控门锁的工作状态要求。
24.图2以图表的形式示出了移动ct机在使用时的操作步骤:
25.步骤1,设备待机,即已经对设备进行预热,可以开始进行ct扫描操作;
26.步骤2,进入扫描预备状态,其为进入扫描程序的第一个阶段,已经准备好进行扫描;
27.步骤3,进入扫描曝光状态,此过程约持续20-30秒;
28.步骤4,再次回到设备待机状态;
29.步骤5,关闭ct机,使其进入关机状态。
30.参见图3,警示控制装置被设计为包括电量综合采集模块和智能控制器。该电量综合采集模块是一款用于综合测量交流电量的智能型隔离电量综合采集仪,其能够实现对交流单相回路的全参数测量,测量参数一般包括电压、电流、频率、有功功率等。现有技术中的电量综合采集模块一般采用高精度24位专用ad芯片,动态范围比高达1000:1,具有精度高、稳定性好、通信速率高的优点。该电量综合采集模块被布置在供电线路上以对移动ct机4的电压和电流进行测量,由此得到移动ct机4的当前耗电功率p。该电量综合采集模块优选采用由深圳市中创智合科技有限公司提供的单相交流电压电流频率功率电量采集器。
31.智能控制器(plc)是现有技术中已知的能够根据预设逻辑判断指令对输入的数据进行判断并且对对应设备发出执行指令的仪器。在电量综合采集模块上可设置有数字接口(例如rs485数字接口,其能够完全兼容于plc设备里的modbus(rtu)协议),智能控制器与该数字接口通信连接,由此获得由电量综合采集模块所采集到的耗电功率p。另外,虽然未示出,但是本领域技术人员应了解的是,数字接口可省略,智能控制器可能与电量综合采集模块进行无线通信。在所述智能控制器对从电量综合采集模块得到的耗电功率p进行逻辑分析后,其会向警示灯6和电控门锁发出指令,通过控制对警示灯6和电控门锁的供电来控制电控门锁的锁定和解锁以及警示灯6的开启和关闭。其中该智能控制器(plc)优选采用由三菱电机提供的fx3ga-40mr-cm型号产品。
32.表2仍以小型16层多功能移动ct机(mct-i型)为例说明为智能控制器编辑的逻辑
判断指令和在对应逻辑判断指令下智能控制器将对警示灯6和电控门锁发出的命令以及最终所展示出的结果。其中表2中示出的多个预设阈值范围是根据表1中列出的不同作业状态所对应的功率范围进行设计的。
33.表2
34.输入信号预设阈值范围警示灯执行命令电控门锁执行命令结果p<540w关闭解锁警示灯熄灭且车门可打开540w≤p<900w开启解锁警示灯亮起且车门可以打开p≥900w开启锁定警示灯亮起且车门不可以打开
35.结合表1可知,各个预设阈值范围分别对警示灯和电控门锁有不同的控制命令,由此可呈现出不同的控制结果。当智能控制器从电量综合采集模块处接收到功率p时,其会将该p值与各个预设范围相比较,判断其属于哪一个预设范围内,之后再相应地执行分配给该阈值范围的执行指令。当例如智能控制器接收到的功率为800w时,通过比较智能控制器识别到该p值属于540w≤p<900w的范围内,由此智能控制器会向警示灯发送开启命令,向电控门锁发送解锁命令。当例如智能控制器接收到的功率为1200w时,通过比较智能控制器识别到该p值属于≥900w的范围内,由此智能控制器会向警示灯发送开启命令,向电控门锁发送锁定命令。
36.另外,还由表1可知,移动ct机4在p=0w时处于关机状态,在540w<p≤660w时处于待机状态,在900w<p≤1100w时处于扫描预备状态,在1440w<p≤1760w时处于扫描曝光状态。本文也可将上述范围用作阈值范围输入智能控制器中。当从电量综合采集模块处输入的p值为1050w时,智能控制器通过比较判断p值属于900w<p≤1100w的范围内并且判定出该ct机当前属于扫描预备状态,由此将对警示灯发送开启命令,向电控门锁发送锁定命令。但是应注意的是,当采用上述阈值范围时对电量综合采集模块所采集的功率p的值有一定的要求,即在一段时间内(例如2s内)稳定不变的值才可被看作有效值被传输入智能控制器内。当然对于采集值进行过滤筛选的步骤也可能在智能控制器内进行。这排除了作业状态转换期间瞬值变化的干扰。
37.本文的警示控制装置被设计为还包括设置在驾驶舱1内的紧急开锁按钮。在电控门锁处于锁定状态时,也就是说移动ct机4正处于扫描预备作业或者扫描曝光作业时,如果此时发现位于救护舱2内的患者或者医护人员出现了特殊状态且需要车外的人员立即进入救护舱2协助处理,可启动该紧急开锁按钮对电控门锁进行解锁。当然也可能为该电控门锁配设机械钥匙,以在救护舱2的外部打开车门3。
38.本文的警示控制装置还可包括从所述救护舱2的内部设置在车门3上的机械解锁手柄,在电控门锁处于锁定状态时,也就是说移动ct机4正处于扫描预备作业或者扫描曝光作业时,若救护舱2内部发生紧急情况(例如电路故障)时,医护人员也可通过旋转机械解锁手柄在救护舱2内部对该电控门锁进行解锁,以从救护舱2的内部打开车门3。
39.另外,电控门锁在上文中虽然被公开布置在车门3处以用于控制车门3的关闭和打开,但是其也可被布置在该救护车所具有的其他车门上,例如图1中所示出的右车门。
40.另外,表1和表2以小型16层多功能移动ct机4为例,示出了其在不同作业状态下的对应功率范围,但是本领域技术人员应理解的是,当采用不同型号的移动ct机4时,其在不同作业状态下的对应耗电功率值可能与本文举例的示例部分不同或者完全不同,此时表2
中的每个预设阈值范围的端点值可能会被相应地调整。
41.综上所述,根据本文的警示控制装置实现了将警示灯的开启和关闭以及和电控门锁的解锁与开锁与移动ct机的作业状态相关联,由此降低甚至杜绝了人为忘记开启警示灯或者忘记锁定车门的风险,并且防止了其他人员尤其移动ct的扫描预备和扫描曝光的作业状态下错误地开启车门。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。