1.本发明涉及食品工程技术领域,特别涉及一种新型的锤度智能测量系统及方法。
背景技术:
2.蔗汁澄清与煮糖结晶是蔗糖生产过程中的重要工序,澄清效果和结晶效果都会影响糖的质量以及糖厂的效益,而糖浆锤度是这两道工序中重要的监测参数,准确地监测糖浆锤度有利于提高产品质量。目前,已经提出了许多测量方法,其中电导率法和折光率法较为常见。此外,在糖浆锤度测量的数学模型上,当前多采用混合介电常数和多元回归拟合方法进行建模。
3.电导率法和折光率法测量糖浆锤度时都存在技术缺陷。在实际生产中,不同品种、不同产地的甘蔗所压榨出来的蔗汁的纯度不同,所含有的电解质的成分与数量也不同,因此,在生产过程中糖浆混合物的电导率是在一定范围内波动变化的,由电导率测定的锤度值便会存在较大的误差。采用折光率测定糖浆锤度虽然具有更高的精确度,但由于折光锤度计的穿透性较差,镜头上微小的污垢能导致折光率的较大改变,从而会对仪器的精确测量产生严重的影响。相比之下,微波方法具有各种优势,如机械结构简单、无危害、测量精度高等。此外,由于微波的穿透性较强,测量部位产生的微小的污垢对测量几乎没影响,即稳定性较高。
4.在微波法测量糖浆锤度时,由于测量硬件等不可避免地存在误差,这些误差在基于混合介电理论推导谐振参数与糖浆锤度关系的过程中会叠加,使得最终的锤度测量误差增大。多元回归拟合方法获取的是谐振参数与糖浆锤度整体趋势上的数学关系,但对于个体可能偏差较大,而神经网络算法在理论上能够逼近任何数学函数,可以更好地从离散数据中寻找变量之间的数学关系。核极限学习机(kelm)易于实现的特点和快速学习的能力使其被广泛应用于分类和回归分析中。然而,由于核极限学习机的正则化参数c与核函数参数γ的赋值是随机的,会导致模型输出出现随机波动以及收敛速度较慢。
技术实现要素:
5.本发明的目的在于提供一种新型的锤度智能测量系统及方法,可以精确、稳定地测量出糖浆锤度。
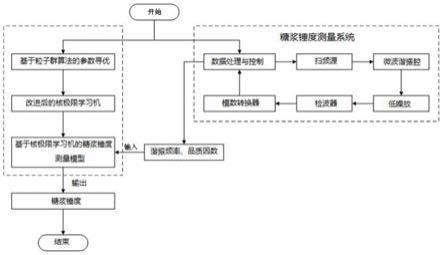
6.为实现上述目的,本发明提供一种新型的锤度智能测量系统,包括数据处理与控制模块、扫频源模块、微波谐振腔、低噪放模块、检波器模块和模数转换器模块;
7.所述数据处理与控制模块实现数据的采集、处理、缓冲、传输和通信的功能,所述数据处理与控制模块将数据采集指令发送给所述扫频源模块;所述扫频源模块产生微波信号,将微波信号输入给所述微波谐振腔;在糖浆的作用下,所述微波谐振腔内部的电磁场发生扰动,导致谐振频率和品质因数发生变化,谐振频率和品质因数变化的微波信号再传输到所述低噪放模块;所述低噪放模块对微波信号进行功率放大,再传输给所述检波器模块;所述检波器模块将微波信号转化为电压信号,传输给所述模数转换器模块;所述模数转换
器模块将电压信号转换为数字信号,再传输给所述数据处理与控制模块。
8.其中,所述微波谐振腔具有圆柱型的腔壁,在所述腔壁的底部设有底板,在所述腔壁的顶部设有圆锥台型的顶盖,所述顶盖的顶部设有孔,所述顶盖的顶部还设有保护盖,所述保护盖为石英玻璃材质;
9.其中,所述微波谐振腔的腔体内设有垂直于所述底板的内导体,所述内导体的底部与所述底板连接,所述内导体的顶部与所述顶盖连接;
10.其中,所述微波谐振腔的所述腔壁上还设有第一探针和第二探针,所述第一探针可在腔体里激起电磁场,所述第二探针用于检测电磁场强度,所述第二探针与所述第一探针呈对阵分布。
11.使用上述锤度智能测量系统来测量糖浆锤度的方法,包括以下步骤:
12.步骤s1,利用粒子群优化算法对核极限学习机的正则化参数c与核函数参数γ进行优化;
13.步骤s2,将步骤s1优化后的正则化参数c与核函数参数γ带入核极限学习机的算法,对核极限学习机进行改进,得到基于核极限学习机的糖浆锤度测量模型;
14.步骤s3,数据处理与控制模块将采集到的谐振频率和品质因数数据输入糖浆锤度测量模型,得到糖浆锤度数据。
15.进一步地,步骤s1中利用粒子群优化算法对核极限学习机的正则化参数c与核函数参数γ进行优化的方法为:
16.步骤s11,首先设定粒子群优化算法涉及的各公式;
17.假设在d维搜索空间中有一个粒子数为n的粒子群,表示为x=(x1,x2,
…
,xn)。第i个粒子在空间中的速度为vi=(v
i1
,v
i2
,
…
,v
id
),xi=(x
i1
,x
i2
,
…
,x
id
)是它的当前位置。通过引入扰动系数r3和r4对个体最优和群体最优位置权重进行调节以促使粒子跳出局部最优,则每个粒子带扰动系数的速度和位置根据自身经历过的最佳位置pi=(p
i1
,p
i2
,
…
,p
id
)和群体经历过的最佳位置分别为
[0018][0019][0020]
其中1≤i≤n,1≤d≤d,t为迭代次数,w为惯性权重,η1、η2为加速系数,r1、r2、r3、r4为范围在[0,1]的随机数。
[0021]
在迭代优化过程中根据适应度值分别利用式(3)和式(4)更新个体最优和群体最优位置:
[0022][0023][0024]
其中,fitness(
·
)为适应度函数。
[0025]
由式(1)可知,惯性权重w影响粒子搜索空间的大小和算法整体的寻优能力;为实现在群友前期增强粒子群的全局搜索能力,而在寻优后期增强粒子群的局部搜索能力,根
据指数函数的特性将其与粒子群的迭代优化过程进行关联,实现寻优过程惯性权重自适应变化,即:
[0026][0027]
式中:w
min
、w
max
为惯性权重的最大值和最小值;t为当前迭代次数;t
max
为最大迭代次数;c
t
为自适应权重常数;
[0028]
步骤s12,设定正则化参数c和核函数参数γ的寻优范围、粒子种群规模、最大迭代次数等参数;
[0029]
步骤s13,随机生成粒子群中各个粒子的初始位置和初始速度;
[0030]
步骤s14,随机确定粒子群中个体最优和全局最优位置;
[0031]
步骤s15,根据公式(1)、(2)、(5)更新各个粒子的位置与速度;
[0032]
步骤s16,计算各个粒子的适应度值,利用公式(3)、(4)获取个体最优和全局最优,保存个体最优、全局最优以及二者的适应度值;
[0033]
步骤s17,判断算法是否达到最大迭代次数,若是,执行下一步骤,否则跳转至步骤s5继续迭代寻优;
[0034]
步骤s18,输出优化的正则化参数c和核函数参数γ。
[0035]
进一步地,步骤s2中,将步骤s1优化后的正则化参数c与核函数参数γ带入核极限学习机的算法,对核极限学习机进行改进,得到基于核极限学习机的糖浆锤度测量模型的方法为:
[0036]
步骤s21,构建谐振频率、品质因数与糖浆锤度的样本数据集,样本数量不低于200个,将样本数据集进行归一化处理后分为训练集与测试集;
[0037]
步骤s22,选择径向基核函数(rbf)作为核函数;
[0038]
步骤s23,利用训练集与粒子群算法优化正则化参数c和核函数参数γ,计算核矩阵ω
elm
;
[0039]
步骤s24,将核矩阵ω
elm
和优化的正则化参数c与核函数参数γ带入核极限学习机的输出函数:
[0040][0041]
得到训练后的核极限学习机模型并保存,其中其中h(x)为隐含层神经元输出函数,h为隐含层输出矩阵,y为期望输出矩阵,k(xi,xj)为多元核函数;
[0042]
步骤s25,将测试集数据输入已经训练的核极限学习机模型中,将模型输出反归一化得到糖浆锤度;这说明已经建立了以谐振频率与品质因数作为输入变量,以糖浆锤度作为输出变量的糖浆锤度测量模型。
[0043]
与现有技术相比,本发明具有如下有益效果:
[0044]
(1)本发明中使用的微波谐振腔经过改良,其顶盖为圆锥台型,可减小电磁场向空间的辐射,提高腔体的品质因数;此外,开口面积的缩小,也大大减小了长期使用导致端面
积垢的几率,提高测量的稳定性;同时,在其顶盖设有开孔,与传统的封闭式谐振腔只适用于离线测量相比,可以进行实时在线测量;
[0045]
(2)本发明针对传统糖浆锤度测量数学模型存在的问题,采用经粒子群算法优化的核极限学习机的数据驱动模型,粒子群算法具有收敛速度快、易于实现等特点,是目前函数最优求解、多目标优化、模式识别和神经网络训练中常用的优化算法之一。针对此问题,引入粒子群算法对极限学习机的正则化参数c与核函数参数γ进行优化,提高了核极限学习机测量糖浆锤度模型的性能。
附图说明
[0046]
图1为本发明的糖浆锤度测量系统及糖浆锤度测量方法的示意图;
[0047]
图2为本发明的微波谐振腔结构示意图;
[0048]
图中,1-腔壁,2-底板,3-顶盖,4-顶盖上的孔,5-保护盖,6-内导体,7-第一探针,8-第二探针;
[0049]
图3为利用粒子群优化算法对核极限学习机的正则化参数c与核函数参数γ进行优化的流程图;
[0050]
图4为基于核极限学习机的糖浆锤度测量模型构建流程图。
具体实施方式
[0051]
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0052]
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
[0053]
实施例一一种新型的锤度智能测量系统及方法
[0054]
如图1所示,本实施例的锤度智能测量系统,包括数据处理与控制模块、扫频源模块、微波谐振腔、低噪放模块、检波器模块和模数转换器模块;
[0055]
数据处理与控制模块实现数据的采集、处理、缓冲、传输和通信的功能,数据处理与控制模块将数据采集指令发送给扫频源模块;扫频源模块在接收指令后产生微波信号,将微波信号输入给微波谐振腔;在糖浆的作用下,微波谐振腔内部的电磁场发生扰动,导致谐振频率和品质因数发生变化,谐振频率和品质因数变化的微波信号再传输到低噪放模块;低噪放模块对微波信号进行功率放大,再传输给检波器模块;检波器模块将微波信号转化为电压信号,传输给模数转换器模块;模数转换器模块将电压信号转换为数字信号,再传输给数据处理与控制模块。
[0056]
如图2所示,微波谐振腔具有圆柱型的腔壁1,在腔壁1的底部设有底板2,在腔壁1的顶部设有圆锥台型的顶盖3,顶盖3的顶部设有孔4,顶盖3的顶部还设有保护盖5,保护盖5为石英玻璃材质;微波谐振腔的腔体内设有垂直于底板2的内导体6,内导体6的底部与底板2连接,内导体6的顶部与顶盖3连接;微波谐振腔的腔壁1上还设有第一探针7和第二探针8,第一探针7可在腔体里激起电磁场,第二探针8用于检测电磁场强度,第二探针8与第一探针7呈对阵分布。
[0057]
使用上述锤度智能测量系统来测量糖浆锤度的方法,包括以下步骤:
[0058]
步骤s1,利用粒子群优化算法对核极限学习机的正则化参数c与核函数参数γ进行优化,如图3所示,由以下步骤组成:
[0059]
步骤s11,首先设定粒子群优化算法涉及的各公式;
[0060]
假设在d维搜索空间中有一个粒子数为n的粒子群,表示为x=(x1,x2,
…
,xn)。第i个粒子在空间中的速度为vi=(v
i1
,v
i2
,
…
,v
id
),xi=(x
i1
,x
i2
,
…
,x
id
)是它的当前位置。通过引入扰动系数r3和r4对个体最优和群体最优位置权重进行调节以促使粒子跳出局部最优,则每个粒子带扰动系数的速度和位置根据自身经历过的最佳位置pi=(p
i1
,p
i2
,
…
,p
id
)和群体经历过的最佳位置分别为
[0061][0062][0063]
其中1≤i≤n,1≤d≤d,t为迭代次数,w为惯性权重,η1、η2为加速系数,r1、r2、r3、r4为范围在[0,1]的随机数;
[0064]
在迭代优化过程中根据适应度值分别利用式(3)和式(4)更新个体最优和群体最优位置:
[0065][0066][0067]
其中,fitness(
·
)为适应度函数;
[0068]
由式(1)可知,惯性权重w影响粒子搜索空间的大小和算法整体的寻优能力;为实现在群友前期增强粒子群的全局搜索能力,而在寻优后期增强粒子群的局部搜索能力,根据指数函数的特性将其与粒子群的迭代优化过程进行关联,实现寻优过程惯性权重自适应变化,即:
[0069][0070]
式中:w
min
、w
max
为惯性权重的最大值和最小值;t为当前迭代次数;t
max
为最大迭代次数;c
t
为自适应权重常数;
[0071]
步骤s12,设定正则化参数c和核函数参数γ的寻优范围、粒子种群规模、最大迭代次数等参数;
[0072]
步骤s13,随机生成粒子群中各个粒子的初始位置和初始速度;
[0073]
步骤s14,随机确定粒子群中个体最优和全局最优位置;
[0074]
步骤s15,根据公式(1)、(2)、(5)更新各个粒子的位置与速度;
[0075]
步骤s16,计算各个粒子的适应度值,利用公式(3)、(4)获取个体最优和全局最优,保存个体最优、全局最优以及二者的适应度值;
[0076]
步骤s17,判断算法是否达到最大迭代次数,若是,执行下一步骤,否则跳转至步骤s5继续迭代寻优;
[0077]
步骤s18,输出优化的正则化参数c和核函数参数γ。
[0078]
步骤s2,将步骤s1优化后的正则化参数c与核函数参数γ带入核极限学习机的算法,对核极限学习机进行改进,得到基于核极限学习机的糖浆锤度测量模型,如图4所示,由以下步骤组成:
[0079]
步骤s21,构建谐振频率、品质因数与糖浆锤度的样本数据集,样本数量不低于200个,将样本数据集进行归一化处理后分为训练集与测试集,训练集与测试集的样本数据量之比为3:1;
[0080]
步骤s22,选择径向基核函数(rbf)作为核函数;
[0081]
步骤s23,利用训练集与粒子群算法优化正则化参数c和核函数参数γ,计算核矩阵ω
elm
;
[0082]
步骤s24,将核矩阵ω
elm
和优化的正则化参数c与核函数参数γ带入核极限学习机的输出函数:
[0083][0084]
得到训练后的核极限学习机模型并保存,其中其中h(x)为隐含层神经元输出函数,h为隐含层输出矩阵,y为期望输出矩阵,k(xi,xj)为多元核函数;
[0085]
步骤s25,将测试集数据输入已经训练的核极限学习机模型中,将模型输出反归一化得到糖浆锤度;这说明已经建立了以谐振频率与品质因数作为输入变量,以糖浆锤度作为输出变量的糖浆锤度测量模型。
[0086]
步骤s3,数据处理与控制模块将采集到的谐振频率和品质因数数据输入糖浆锤度测量模型,得到糖浆锤度数据。
[0087]
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。