1.本实用新型涉及一种运载设备,尤其涉及一种楼梯间货物载运车。
背景技术:
2.随着经济发展和人民生活水平的日益增长,我国城镇化水平不断提高,越来越多的群众入住中高层建筑,但建筑楼层的增加也给群众的日常生活带来了一定的困扰。电梯由于空间局限以及结构限制,基本只能实现人员的进出和轻便物品的载运,不能很好地保障重物的载运。若在电梯里放置过重物品,可能就会出现结构危险问题,及对人员和货物的安全造成威胁,因此很多时候只能通过楼梯进行人工搬运。在没有电梯的建筑中,上下楼梯时住户往往会因携带较多物品而感到不便,尤其对一些重物的搬运,极大地增加了搬运时的工作强度。
3.目前,针对楼梯间的货物搬运,主要有传统人力运载和运载车运载两种方式。
4.人力运载完全需要人力驱动和人为控制,和人力搬运没有区别,效率低、工作量大、安全性低,无法满足社会需求。
5.运载车运载主要采用行星轮式货物运载车和履带式货物运载车,虽然对传统人力载运方式进行了改进,但由于不同建筑中楼梯建造规格不同,而行星轮式和履带式货物运载车的自适应能力较差,台阶高度和宽度的不同会导致行星轮式货物运载车无法完成运载任务。行星轮式和履带式货物运载车在攀爬楼梯过程中,上表面始终保持倾斜状态,当货物高度较大时,容易发生后翻,处于极不安全的姿态。在转弯时,行星轮式和履带式货物运载车采用差速运动模式,改变运载车前进方向,实现转弯运动,其转弯运动轨迹为圆弧状,此运动轨迹要求楼梯具有较大的转向空间,进一步限制了行星轮式和履带式货物运载车的使用范围。且在使用行星轮式货物运载车和履带式货物运载车进行货物运输时,需要运输人员在旁边辅助运输,没有完全实现自动化运输。
6.行星轮式货物运载车的设计可参见[1]冯永健.行星轮式智能楼梯运输车设计[j].机械工程与自动化,2016,(5):158-159。
技术实现要素:
[0007]
本实用新型的目的是提供一种楼梯间货物载运车,能够适应不同建筑中的各类楼梯设计规格,安全、快捷、高效地完成楼梯间货物运输工作。
[0008]
本实用新型采用下述技术方案:
[0009]
一种楼梯间货物载运车,包括载物箱、车架和移动系统;载物箱设置在车架上表面,移动系统设置在车架下表面;移动系统包括前后设置的若干组升降式移动车轮机构,每组升降式移动车轮机构均包括驱动电机、剪叉式升降装置、车轮行进传动机构和由两个车轮组成的车轮组;驱动电机设置在上平台上表面,车轮组设置在下平台下表面,剪叉式升降装置的上下两端分别与上平台和下平台连接;驱动电机驱动剪叉式升降装置带动下平台进行升降;驱动电机还通过车轮行进传动机构同步驱动两个车轮行进转动机构,两个车轮行
进转动机构分别驱动对应的车轮同步转动;下平台上还设置有车轮转向机构,车轮转向机构包括车轮转向电机和车轮转向传动机构,车轮转向电机通过车轮转向传动机构驱动车轮组中的两个车轮同步转向。
[0010]
相邻两组升降式移动车轮机构之间的车架下表面上还设置有伸缩式辅助支撑机构;伸缩式辅助支撑机构包括辅助支撑轮架、轮架升降装置和轮架升降电机,轮架升降电机通过轮架升降装置驱动辅助支撑轮架进行升降,辅助支撑轮架下端设置有辅助支撑轮。
[0011]
所述的驱动电机设置在上平台上表面右部,驱动电机的输出轴连接有减速器,减速器的输出轴的左端设置有第一主动锥齿轮,上平台上表面左部设置有液压杆,液压杆的右端转动设置有液压杆直齿圆柱齿轮,液压杆直齿圆柱齿轮的右表面同轴固定设置有第一从动锥齿轮,第一主动锥齿轮和第一从动锥齿轮通过第一辅助传动锥齿轮和第二辅助传动锥齿轮啮合传动;第一辅助传动锥齿轮和第二辅助传动锥齿轮同轴固定在车轮行进传动机构第一传动轴上,且第一辅助传动锥齿轮和第二辅助传动锥齿轮分别位于第一主动锥齿轮和第一从动锥齿轮前后两侧;液压杆直齿圆柱齿轮通过第一传动直齿圆柱齿轮与第一丝杠直齿圆柱齿轮传动连接,丝杠直齿圆柱齿轮同轴固定在第一丝杠外表面;剪叉式升降装置包括两组主动剪叉升降臂和两组从动剪叉升降臂,上平台和下平台的前后两侧均设置有一组主动剪叉升降臂和一组从动剪叉升降臂,上平台和下平台的前后两侧均设置有两组滑轨,每组滑轨前端均设置有轴承座,前后两侧主动剪叉升降臂和从动剪叉升降臂的上臂上端和下臂下端的铰接端均通过铰接臂转轴转动设置在轴承座内,前后两侧主动剪叉升降臂和从动剪叉升降臂的上臂上端和下臂下端的活动端通过对应的滑杆滑动设置在滑轨内,前后两侧主动剪叉升降臂上臂之间连接的滑杆设置在滑块上,滑块与丝杠螺母连接。
[0012]
所述的车轮行进传动机构采用链轮链条传动系统,车轮行进传动机构第一传动轴的前侧同轴固定有第一链轮,从动剪叉升降臂上臂的铰接臂转轴前侧同轴固定有第二链轮,从动剪叉升降臂上臂下端和下臂上端的铰接轴前侧同轴固定有第三链轮,从动剪叉升降臂下臂的铰接臂转轴前侧同轴固定有第四链轮,相邻两个链轮之间均设置有传动链条;从动剪叉升降臂下臂的铰接臂转轴的右端设置有第二主动锥齿轮,两个车轮行进转动机构的车轮行进主动轴均竖向转动设置在下平台上,且其中一个车轮行进转动机构的车轮行进主动轴上设置有第二从动锥齿轮,第二主动锥齿轮和第二从动锥齿轮啮合;两个车轮行进转动机构的车轮行进主动轴上均设置有车轮行进主动轴直齿圆柱齿轮,两个车轮行进主动轴直齿圆柱齿轮通过链条传动连接。
[0013]
所述的车轮行进转动机构包括车轮行进主动轴、行进车轮轮架和行进车轮轮架安装板,行进车轮轮架安装板设置在下平台下表面,行进车轮轮架安装板上设置有车轮行进主动轴轴承,车轮行进主动轴通过车轮行进主动轴轴承与行进车轮轮架安装板转动连接,车轮行进主动轴的下端位于行进车轮轮架内且设置有第三主动锥齿轮,行进车轮轮架内从上至下分别水平设置有车轮行进驱动轴和车轮行进转轴,车轮行进驱动轴上设置有车轮行进驱动轴皮带轮和与第三主动锥齿轮啮合的第三从动锥齿轮,车轮行进转轴上同轴固定设置有车轮和车轮行进转轴皮带轮,车轮行进驱动轴皮带轮和车轮行进转轴皮带轮之间设置有皮带。
[0014]
所述的车轮转向传动机构包括固定设置在行进车轮轮架上端面的转动齿轮,转动齿轮与车轮行进主动轴同轴设置且转动连接,车轮转向电机设置在下平台上表面,且车轮
转向电机的输出轴连接传动结构,传动结构的输出轴穿过下平台且设置有第一转向主动齿轮,第一转向主动齿轮还与左右对称转动设置在下平台另一侧的第二转动主动齿轮通过链条传动连接,第一转向主动齿轮和第二转动主动齿轮的上方分别同轴设置有第一转向从动齿轮和第二转向从动齿轮,第一转向从动齿轮和第二转向从动齿轮分别与对应一侧行进车轮轮架上端面设置的转动齿轮啮合。
[0015]
所述的第二从动锥齿轮通过键和车轮行进主动轴上的键槽与车轮行进主动轴同步转动,第二从动锥齿轮的下表面还同轴固定设置有圆形的压板,压板下方的车轮行进主动轴上套设有弹簧,弹簧在自然状态下,第二主动锥齿轮和第二从动锥齿轮啮合;下平台左侧还设置有凸轮电机,凸轮电机驱动凸轮转动,凸轮的突出部转动至下方时下压压板,驱动第二主动锥齿轮和第二从动锥齿轮分离。
[0016]
所述的轮架升降装置包括第二丝杠和升降板,轮架升降电机与第二丝杠同轴连接,升降板与丝杠螺母固定连接,两个辅助支撑轮架分别卡设在升降板左右两侧且通过连接销连接。
[0017]
所述的轮架升降装置还包括安装板,安装板的前侧上端设置有轮架升降电机安装座,轮架升降电机设置在轮架升降电机安装座内,第二丝杠的左右两侧分别设置有辅助滑杆,升降板的左右两侧设置有与辅助滑杆对应的辅助滑杆穿孔;安装板的前侧还竖向设置有限位滑道,升降板的后侧设置有与限位滑道匹配的滑块,升降板通过滑块与限位滑道滑动连接。
[0018]
所述的车架采用平板状车架,若干组伸缩式辅助支撑机构中的安装板的上表面和升降式移动车轮机构中的上平台的上表面均通过螺栓与车架可拆卸连接。
[0019]
本实用新型中,采用驱动电机驱动剪叉式升降装置运动以实现攀爬楼梯的功能,具有结构简单、承载量大、安装空间小、自动化程度高且易于实现集中控制的特点,具有很大的伸缩比。剪叉式升降装置可在控制下实现自由调节升降高度,故本实用新型能够适用于不同高度的楼梯,可一次攀爬一层台阶,也可一次攀爬多层台阶,大大提高攀爬楼梯的效率。本实用新型能够在平坦的路面上稳定行驶,又可以在楼梯上自由攀爬,可在楼梯和平地两种工作状态之间平稳的切换。
[0020]
本实用新型还有效解决了车身重量及车身重心的问题。本实用新型为了舍弃常规方法中每组剪叉式升降装置中使用到的液压杆,降低本实用新型的重量,特殊设计了用于提供总动力的驱动电机和丝杠驱动剪叉式升降装置的结构。同时还特殊设计有车轮行进传动机构,将链条链轮固定在剪叉升降臂的侧壁,高效解决了变距动力传输问题,能够将驱动电机的动力传输到下方独立的各个车轮,提供前进后退的动力,有效减少了电机使用数目,达到了动力多级利用的目的。为了保证楼梯攀爬过程中的重心稳定,本实用新型在相邻两组升降式移动车轮机构之间增设有伸缩式辅助支撑机构,以替代抬升的升降式移动车轮机构作为新的支撑点。
[0021]
本实用新型还解决了狭小空间转向问题。车轮转向电机能够在整体不动的情况下控制车轮实现90度的转向,使本实用新型的使用范围更加广泛。同时,转向电机的作用通过齿轮链条配合将一个电机动力分配到两个转轮上,减少电机的使用,降低了车身的自重。
附图说明
[0022]
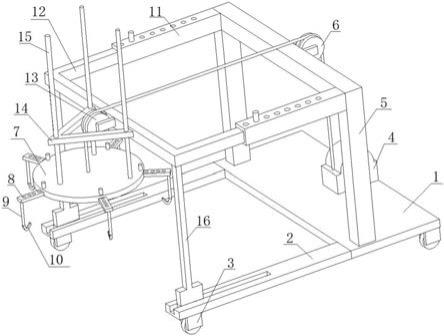
图1为本实用新型的结构示意图;
[0023]
图2为本实用新型中移动系统的结构示意图;
[0024]
图3为本实用新型中驱动电机的连接结构示意图;
[0025]
图4为本实用新型中剪叉式升降装置的结构示意图;
[0026]
图5为本实用新型中移动系统的结构示意图;
[0027]
图6为本实用新型中车轮行进转动机构的结构示意图;
[0028]
图7为本实用新型中车轮转向传动机构的结构示意图;
[0029]
图8为本实用新型中第二主动锥齿轮和第二从动锥齿轮的连接结构示意图;
[0030]
图9为本实用新型中伸缩式辅助支撑机构的结构示意图;
[0031]
图10为本实用新型爬楼梯前的状态示意图;
[0032]
图11为本实用新型中第一组升降式移动车轮机构爬上第一阶台阶时的状态示意图;
[0033]
图12为本实用新型中第一组伸缩式辅助支撑机构爬上第一阶台阶时的状态示意图;
[0034]
图13为本实用新型中第二组升降式移动车轮机构爬上第一阶台阶时的状态示意图;
[0035]
图14为本实用新型中第二组伸缩式辅助支撑机构爬上第一阶台阶时的状态示意图;
[0036]
图15为本实用新型中第三组升降式移动车轮机构爬上第一阶台阶时的状态示意图;
[0037]
图16为本实用新型中第三组升降式移动车轮机构爬上第二阶台阶时的状态示意图。
具体实施方式
[0038]
以下结合附图和实施例对本实用新型作以详细的描述:
[0039]
如图1至图16所示,本实用新型所述的楼梯间货物载运车,包括载物箱1、车架2和移动系统;载物箱1设置在车架2上表面,用于承载货物;车架2用于连接载物箱1和移动系统;移动系统设置在车架2下表面,用于实现本实用新型的升降、进退和转向功能;
[0040]
本实用新型中,移动系统包括前后设置的若干组升降式移动车轮机构3,每组升降式移动车轮机构3均包括驱动电机4、剪叉式升降装置5、车轮行进传动机构6和由两个车轮组7成的车轮组7;每组升降式移动车轮机构3均可单独实现升降、进退和转向功能。驱动电机4设置在上平台8上表面,车轮组7设置在下平台9下表面,剪叉式升降装置5的上下两端分别与上平台8和下平台9连接。驱动电机4驱动剪叉式升降装置5带动下平台9进行升降;驱动电机4还通过车轮行进传动机构6同步驱动两个车轮行进转动机构10,两个车轮行进转动机构10分别驱动对应的车轮同步转动;下平台9上还设置有车轮转向机构11,车轮转向机构11包括车轮转向电机12和车轮转向传动机构13,车轮转向电机12通过车轮转向传动机构13驱动车轮组7中的两个车轮同步转向。
[0041]
本实用新型中,驱动电机4设置在上平台8上表面右部,驱动电机4的输出轴连接有
减速器14,减速器14的输出轴的左端设置有第一主动锥齿轮15,上平台8上表面左部设置有液压杆16,液压杆16的右端转动设置有液压杆直齿圆柱齿轮17,液压杆直齿圆柱齿轮17的右表面同轴固定设置有第一从动锥齿轮18,第一主动锥齿轮15和第一从动锥齿轮18通过第一辅助传动锥齿轮19和第二辅助传动锥齿轮20啮合传动;第一辅助传动锥齿轮19和第二辅助传动锥齿轮20同轴固定在车轮行进传动机构第一传动轴21上,且第一辅助传动锥齿轮19和第二辅助传动锥齿轮20分别位于第一主动锥齿轮15和第一从动锥齿轮18前后两侧;液压杆直齿圆柱齿轮17通过下方的第一传动直齿圆柱齿轮22与第一丝杠直齿圆柱齿轮23传动连接,第一丝杠直齿圆柱齿轮23同轴固定在第一丝杠24外表面;剪叉式升降装置5包括两组主动剪叉升降臂25和两组从动剪叉升降臂26,上平台8和下平台9的前后两侧均设置有一组主动剪叉升降臂25和一组从动剪叉升降臂26,上平台8和下平台9的前后两侧均设置有两组滑轨27,每组滑轨27前端均设置有轴承座28,前后两侧主动剪叉升降臂25和从动剪叉升降臂26的上臂上端和下臂下端的铰接端均通过铰接臂转轴33转动设置在轴承座28内,前后两侧主动剪叉升降臂25和从动剪叉升降臂26的上臂上端和下臂下端的活动端通过对应的滑杆29滑动设置在滑轨27内,前后两侧主动剪叉升降臂25上臂之间连接的滑杆29设置在滑块30上,滑块30与丝杠螺母连接。
[0042]
本实施例中,当需要对下平台9进行升降控制时,液压杆16驱动第一从动锥齿轮18与第一主动锥齿轮15处于啮合状态。此时,由于驱动电机4通过减速器14驱动第一主动锥齿轮15转动,液压杆16右端设置的第一从动锥齿轮18将带动液压杆直齿圆柱齿轮17随第一主动锥齿轮15同步转动;由于液压杆直齿圆柱齿轮17通过第一传动直齿圆柱齿轮22与设置在第一丝杠24外表面的第一丝杠直齿圆柱齿轮23传动连接,因此驱动电机4的转动,最终带动第一丝杠24同步转动。随着第一丝杠24的转动,与丝杠螺母连接的滑块30将会向左或向右运动,滑块30将带动与前后两侧主动剪叉升降臂25上臂连接的滑杆29沿滑轨27向左或向右运动,从而带动前后两侧主动剪叉升降臂25上臂的活动端向左或向右运动,最终实现剪叉式升降装置5的上升或下降。前后两侧从动剪叉升降臂26将随主动剪叉升降臂25同步运动,以保证下平台9运动时的稳定性。当不需要对下平台9进行升降控制时,液压杆16驱动第一从动锥齿轮18与第一主动锥齿轮15脱离啮合状态,此时驱动电机4的动作对剪叉式升降装置5无任何影响。
[0043]
本实用新型中,车轮行进传动机构6采用链轮链条传动系统,车轮行进传动机构第一传动轴21的前侧同轴固定有第一链轮31,从动剪叉升降臂26上臂的铰接臂转轴33前侧同轴固定有第二链轮32,从动剪叉升降臂26上臂下端和下臂上端的铰接轴前侧同轴固定有第三链轮34,从动剪叉升降臂26下臂的铰接臂转轴前侧同轴固定有第四链轮35,相邻两个链轮之间均设置有传动链条36;从动剪叉升降臂26下臂的铰接臂转轴33的右端设置有第二主动锥齿轮37,两个车轮行进转动机构10的车轮行进主动轴38均竖向转动设置在下平台9上,且其中一个车轮行进转动机构10的车轮行进主动轴38上设置有第二从动锥齿轮39,第二主动锥齿轮37和第二从动锥齿轮39啮合;两个车轮行进转动机构10的车轮行进主动轴38上均设置有车轮行进主动轴直齿圆柱齿轮40,两个车轮行进主动轴直齿圆柱齿轮40通过链条传动连接。
[0044]
所述的车轮行进转动机构10包括车轮行进主动轴38、行进车轮轮架41和行进车轮轮架安装板42,行进车轮轮架安装板42设置在下平台9下表面,行进车轮轮架安装板42上设
置有车轮行进主动轴轴承,车轮行进主动轴38通过车轮行进主动轴轴承与行进车轮轮架安装板42转动连接,车轮行进主动轴38的下端位于行进车轮轮架41内且设置有第三主动锥齿轮43,行进车轮轮架41内从上至下分别水平转动设置有车轮行进驱动轴44和车轮行进转轴45,车轮行进驱动轴44上设置有车轮行进驱动轴皮带轮46和与第三主动锥齿轮43啮合的第三从动锥齿轮47,车轮行进转轴45上同轴固定设置有车轮和车轮行进转轴皮带轮48,车轮行进驱动轴皮带轮46和车轮行进转轴皮带轮48之间设置有皮带。
[0045]
本实施例中,第一主动锥齿轮15始终与第一辅助传动锥齿轮19和第二辅助传动锥齿轮20啮合传动,第一辅助传动锥齿轮19和第二辅助传动锥齿轮20又同轴固定在车轮行进传动机构第一传动轴21上,因此驱动电机4通过减速器14将带动第一传动轴上的第一链轮31同步转动,第一链轮31又通过第二链轮32、第三链轮34、第四链轮35及对应的传动链条36带动与第四链轮35同轴连接的第二主动锥齿轮37转动。由于车轮行进转动机构10的车轮行进主动轴38上设置的第二从动锥齿轮39与第二主动锥齿轮37啮合,最终实现了驱动电机4带动车轮行进主动轴38的同步转动。
[0046]
在车轮行进转动机构10中,车轮行进主动轴38的转动将通过第三主动锥齿轮43和与第三主动锥齿轮43啮合的第三从动锥齿轮47带动车轮行进驱动轴44转动,车轮行进驱动轴44又通过车轮行进驱动轴皮带轮46、车轮行进转轴皮带轮48及两者间设置的皮带带动车轮行进转轴45转动,最终由车轮行进转轴45带动对应的车轮转动,实现前进或后退。由于两个车轮行进转动机构10的车轮行进主动轴38通过车轮行进主动轴直齿圆柱齿轮40和链条传动连接,因此最终实现了由驱动电机4带动两个车轮同步转动的作用。
[0047]
本实用新型中,车轮转向传动机构13包括固定设置在行进车轮轮架41上端面的转动齿轮49,转动齿轮49与车轮行进主动轴38同轴设置且转动连接;车轮转向电机12设置在下平台9上表面,且车轮转向电机12的输出轴连接传动结构,且传动结构的输出轴穿过下平台9设置有第一转向主动齿轮50,第一转向主动齿轮50还与左右对称转动设置在下平台9另一侧的第二转动主动齿轮51通过链条传动连接,第一转向主动齿轮50和第二转动主动齿轮51的上方分别同轴设置有第一转向从动齿轮52和第二转向从动齿轮53,第一转向从动齿轮52和第二转向从动齿轮53分别与对应一侧行进车轮轮架41上端面设置的转动齿轮49啮合。
[0048]
本实施例中,车轮转向电机12通过第一转向主动齿轮50带动与第一转向主动齿轮50通过链条传动连接第二转动主动齿轮51,同时,第一转向主动齿轮50和第二转动主动齿轮51的转动将带动分别与其同轴设置的第一转向从动齿轮52和第二转向从动齿轮53,再由第一转向从动齿轮52和第二转向从动齿轮53分别带动对应的行进车轮轮架41上端面设置的转动齿轮49,使对应的行进车轮轮架41随转向从动齿轮49同步转向,以实现车轮的转向功能。
[0049]
为了控制车轮在转向时停止转动,本实用新型中,第二从动锥齿轮39通过键和车轮行进主动轴38上的键槽与车轮行进主动轴38滑动连接且同步转动,第二从动锥齿轮39的下表面还同轴固定设置有圆形的压板54,压板54下方的车轮行进主动轴38上套设有弹簧67,弹簧67在自然状态下,第二主动锥齿轮37和第二从动锥齿轮39啮合;下平台9左侧还设置有凸轮电机55,凸轮电机55驱动凸轮56转动,凸轮56的突出部转动至下方时下压压板54,驱动第二主动锥齿轮37和第二从动锥齿轮39分离。
[0050]
当凸轮电机55驱动凸轮56转动,使凸轮56的突出部下压压板54从而驱动第二主动
锥齿轮37和第二从动锥齿轮39分离后,驱动电机4的转动将无法带动车轮转动,此时即可通过车轮转向电机12控制车轮转向;在完成转向后,凸轮电机55驱动凸轮56继续转动,凸轮56的突出部不再下压压板54,此时第二从动锥齿轮39将在弹簧的作用下上升与第二主动锥齿轮37重新啮合,此时将由驱动电机4继续驱动车轮转动。
[0051]
考虑到当某组升降式移动车轮机构3在上升过程中失去支点作用,载物箱1内的重物可能会因重心偏移而造成本实用新型的前倾翻到,因此,本实用新型中还特殊设计有伸缩式辅助支撑机构57,用于代替前侧已上升的升降式移动车轮机构3作用新的支点,以保证本实用新型的稳定。
[0052]
本实用新型中,相邻两组升降式移动车轮机构3之间的车架2下表面上还设置有伸缩式辅助支撑机构57;伸缩式辅助支撑机构57包括辅助支撑轮架58、轮架升降装置和轮架升降电机59,轮架升降电机59通过轮架升降装置驱动辅助支撑轮架58进行升降,辅助支撑轮架58下端设置有辅助支撑轮60。
[0053]
本实施例中,辅轮架升降装置包括第二丝杠61和升降板62,轮架升降电机59与第二丝杠61同轴连接并驱动第二丝杠61转动,升降板62与丝杠螺母固定连接,两个辅助支撑轮架58分别卡设在升降板62左右两侧且通过连接销63连接。在丝杠转动的过程中,丝杠螺母将通过升降板62带动两侧的辅助支撑轮架58上升或下降,以实现收纳和支撑作用。
[0054]
为保证辅助支撑轮架58在升降过程中的稳定性,轮架升降装置还包括安装板64,安装板64的前侧上端设置有轮架升降电机安装座,轮架升降电机59设置在轮架升降电机安装座内,第二丝杠61的左右两侧分别设置有辅助滑杆65,升降板62的左右两侧设置有与辅助滑杆65对应的辅助滑杆穿孔,辅助滑杆65设置于对应的辅助滑杆穿孔内起到导向作用。安装板64的前侧还竖向设置有限位滑道66,升降板62的后侧设置有与限位滑道66匹配的滑块,升降板62通过滑块与限位滑道66滑动连接,进一步保证辅助支撑轮架58在升降过程中的稳定性。
[0055]
本实用新型中,车架2采用平板状车架,若干组伸缩式辅助支撑机构57中的安装板64的上表面和升降式移动车轮机构3中的上平台8的上表面均通过螺栓与车架2可拆卸连接。
[0056]
设本实用新型具有三组升降式移动车轮机构3,且三组升降式移动车轮机构3中交叉设置有两组伸缩式辅助支撑机构57,每组升降式移动车轮机构3与伸缩式辅助支撑机构57前表面均设置有激光测距装置。
[0057]
在使用过程中,本实用新型由对应的驱动电机4分别控制三组升降式移动车轮机构3中的车轮同步转动,使本实用新型前进;当遇到台阶时,最前方一组升降式移动车轮机构3上设置的激光测距装置将检测到台阶的存在及台阶的高度,然后由对应的凸轮电机55分别控制三组升降式移动车轮机构3中的车轮停止转动;再由最前方的伸缩式辅助支撑机构57中的轮架升降电机59驱动辅助支撑轮下降至地面,起到稳定支撑的作用。随后,最前方一组升降式移动车轮机构3中的液压杆16控制第一从动锥齿轮18与第一主动锥齿轮15从分离状态转换为啮合状态,此时将由最前方一组升降式移动车轮机构3的驱动电机4驱动对应的剪叉式升降装置5上升,从而使最前方一组升降式移动车轮机构3中的车轮抬升至台阶的高度。然后再由对应的驱动电机4分别控制三组升降式移动车轮机构3中的车轮同步转动,使最前方的伸缩式辅助支撑机构57中的辅助支撑轮到达台阶处,此时前方一组升降式移动
车轮机构3中的车轮已位于台阶上方的地面处;
[0058]
随后,由对应的凸轮电机55分别控制三组升降式移动车轮机构3中的车轮停止转动;再由最前方的伸缩式辅助支撑机构57中的轮架升降电机59驱动辅助支撑轮上升至台阶高度后,再由对应的驱动电机4分别控制三组升降式移动车轮机构3中的车轮同步转动,使中间的升降式移动车轮机构3中的车轮到达台阶处,此时最前方的伸缩式辅助支撑机构57中的辅助支撑轮已位于台阶上方的地面处;依次类推,直至最后一组升降式移动车轮机构3中的车轮已位于台阶上方的地面处,完成台阶的跨越。
[0059]
当本实用新型在楼梯间狭小空间内需要进行90度的转向时,由对应的凸轮电机55分别控制三组升降式移动车轮机构3中的车轮停止转动;再由对应的车轮转向电机12分别控制车轮同步进行逆时针90度的转向;随后由对应的凸轮电机55分别控制三组升降式移动车轮机构3中的车轮同步转动前进,到达指定位置,实现90度的转向功能。若需要实现180度的转向,可在首次90度的转向后,以相同的方法控制车轮在次同步进行顺时针90度的转向,即完成了本实用新型180度的u形的转向工作。
[0060]
本实用新型中,采用驱动电机4驱动剪叉式升降装置5运动以实现攀爬楼梯的功能,具有结构简单、承载量大、安装空间小、自动化程度高且易于实现集中控制的特点,具有很大的伸缩比。剪叉式升降装置5可在控制下实现自由调节升降高度,故本实用新型能够适用于不同高度的楼梯,可一次攀爬一层台阶,也可一次攀爬多层台阶,大大提高攀爬楼梯的效率。本实用新型能够在平坦的路面上稳定行驶,又可以在楼梯上自由攀爬,可在楼梯和平地两种工作状态之间平稳的切换。
[0061]
本实用新型还有效解决了车身重量及车身重心的问题。本实用新型为了舍弃常规方法中每组剪叉式升降装置5中使用到的液压杆16,降低本实用新型的重量,特殊设计了用于提供总动力的驱动电机4和丝杠驱动剪叉式升降装置5的结构。同时还特殊设计有车轮行进传动机构6,将链条链轮固定在剪叉升降臂的侧壁,高效解决了变距动力传输问题,能够将驱动电机4的动力传输到下方独立的各个车轮,提供前进后退的动力,有效减少了电机使用数目,达到了动力多级利用的目的。为了保证楼梯攀爬过程中的重心稳定,本实用新型在相邻两组升降式移动车轮机构3之间增设有伸缩式辅助支撑机构57,以替代抬升的升降式移动车轮机构3作为新的支撑点。
[0062]
本实用新型还解决了狭小空间转向问题。车轮转向电机12能够在整体不动的情况下控制车轮实现90度的转向,使本实用新型的使用范围更加广泛。同时,转向电机的作用通过齿轮链条配合将一个电机动力分配到两个转轮上,减少电机的使用,降低了车身的自重。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。