1.本发明涉及激光直接成像设备标定的技术领域,尤其涉及一种激光直接成像设备内层靶标标定方法。
背景技术:
2.激光直接成像设备生产内层板中,其对位过程为:在曝光基板正面cam资料图形的同时,点亮对应的内层靶标光源并在基板的背面打上标记图形;在基板翻面之后开始曝光基板背面cam资料图形时,通过内层靶标打上的标记图形以确认计算当前cam资料图形在基板背面的位置,以便与基本正面cam资料图形满足要求的相对位置精度,内层板生产过程中的对位误差,相对于外层板来说主要来源便是内存靶标位置标定误差;当前常见的处理方式为:通过激光直接成像设备成像(曝光)坐标系挂载视觉相机或对位坐标系的对位相机直接抓取内层靶标位置,通过换算得到内层靶标在成像(曝光)坐标系中的位置,受限于靶标模块的光路特性、机加工的精度以及曝光基板感光材料的特性,此方法所标定出的靶标位置并不能反映出实际生产过程中内层靶标在基板中的成像位置,并且此误差在各个内层靶标上的表现并不一致,最终的结果便是激光直接成像设备在做内层板时,其误差没有一个规范的校准方法,很多都是通过实际生产中的误差进行调整,并且更换基板尺寸时其误差补偿需要重新调整,影响了设备的产能及良率。
技术实现要素:
3.为了提高标定的精度,为此,本发明提出了一种激光直接成像设备内层靶标标定方法,具体方案如下:
4.一种激光直接成像设备内层靶标标定方法,包括以下步骤:
5.s1、选择一个基板放置于吸盘上,所述基板正面和基板反面均有通过机器视觉识别的标记,其位置作为基板标记位置;
6.s2、通过激光直接成像设备将带有可识别标记图形的cam资料曝光在基板上,并在曝光过程中点亮所有吸盘上的内层靶标光源,在基板背面打上内层靶标标记图形,记录当前cam内可识别标记图形的cam坐标系坐标p
c0
、p
c1
…
p
cn
、cam坐标系到激光直接成像设备的成像坐标系的变换矩阵martrix
c2e
;
7.s3、通过测量系统依次抓取显影在基板上的cam标记图形位置以及基板标记位置,记录cam标记图形在测量坐标系中的位置为p
m0
、p
m1
…
p
mn
,记录基板标记位置在测量坐标系中为l
m0
、l
m1
…
l
mn
;
8.s4、将基板垂直或水平翻面后,使用测量系统依次抓取显影在翻转后基板上的内层靶标标记图形位置以及基板标记位置,记录内层靶标标记图形在测量坐标系中的位置为m
′
m0
、m
′
m1
…m′
mn
,记录翻面后基板标记位置在测量坐标系中为l
′
m0
、l
′
m1
…
l
′
mn
;
9.s5、根据各个步骤的标记或靶标测量坐标值,通过坐标线性变换,计算出内层靶标在成像坐标系的精确位置信息。
10.具体地说,步骤s5具体为:
11.由翻面前后的基板标记位置计算出翻面前后基板图形的变换martrix
flip
:
12.martrix
flip
=[l
′
m0
,l
′
m1
...l
′
mn
]
→
[l
m0
,l
m1
...l
mn
]
[0013]
将此变换代入到s4步骤记录的内层靶标标记图形位置进行计算即可计算出内层靶标标记图形在测量基板正面时位于测量坐标系的位置m
m0
,m
m1
...m
mn
:
[0014][0015]
由s2步骤记录的cam坐标系到成像坐标系的变换以及cam内可识别标记图形的cam坐标系坐标可计算出ccam内可识别标记图形在曝光后位于成像坐标系的坐标p
e0
、p
e1
...p
en
:
[0016][0017]
由s3步骤记录的cam内可识别标记图形在测量坐标系中的位置p
m0
、p
m1
…
p
mn
以及上步所计算的cam内可识别标记图形在曝光后位于成像坐标系的坐标可计算出测量坐标系到成像坐标系的变换:
[0018]
martrix
m2e
=[p
m0
,p
m1
...p
mn
]
→
[p
e0
,p
e1
...p
en
]
[0019]
使用上述变换矩阵转换内层靶标坐标到成像坐标m
e0
,m
e1
...m
en
:
[0020][0021]
具体地说,所述标记为通孔和或基板的边角。
[0022]
具体地说,所述标记至少3个。
[0023]
本发明的有益效果在于:
[0024]
(1)本方法不需要借助复杂的工具,曝光基板是激光直接成像设备常用的生成材料,因此标定条件及过程非常简单。
[0025]
(2)基于本方法,标定精度高,针对于内层板的生产,激光直接成像设备在流程中所最终使用的即是在成像坐标系中的精确位置。
附图说明
[0026]
图1为本发明提出的一种激光直接成像设备内层靶标标定方法中的基板正面图。
[0027]
图2为本发明提出的一种激光直接成像设备内层靶标标定方法中cam资料的示意图。
[0028]
图3为本发明提出的一种激光直接成像设备内层靶标标定方法中cam资料中的可识别的标记图形打在基板正面的示意图。
[0029]
图4为本发明提出的一种激光直接成像设备内层靶标标定方法中吸盘的结构图。
[0030]
图5为本发明提出的一种激光直接成像设备内层靶标标定方法中基板背面打上内层靶标标记图形的示意图。
[0031]
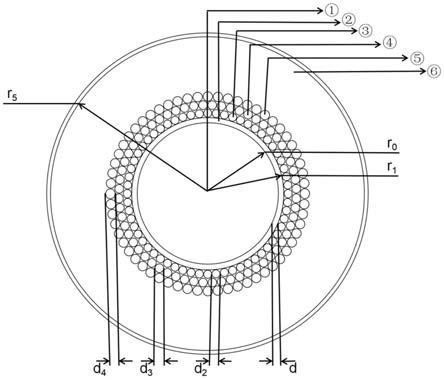
图6为本发明使用的现有技术中的一种测量系统的示意图。
[0032]
图中:
[0033]
101、基板正面;102、基板反面;11、通孔;12、边角;13、cam标记图形;14、内层靶标标记图形;2、cam资料;21、可识别标记图形;3、吸盘;31、内层靶标光源;32、定位条。
具体实施方式
[0034]
一种激光直接成像设备内层靶标标定方法,包括以下步骤:
[0035]
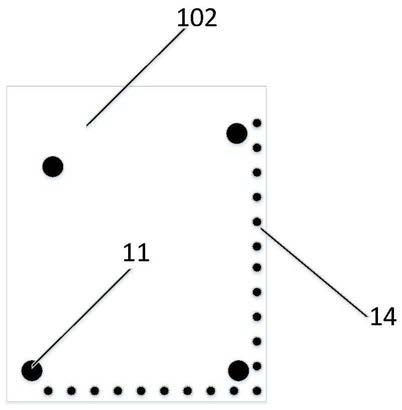
s1、选择一个基板放置于吸盘3上,所述基板正面101和基板反面102均有通过机器视觉识别的标记,其位置作为基板标记位置,所述标记至少3个,所述标记为通孔11或基板的边角12;如图1所示,在该方案中,标记以通孔11为例。考虑到整个标定过程中的系统误差,建议使用多个标记点可以获得更好的标定精度。所述吸盘3结构如图4所示。
[0036]
s2、通过激光直接成像设备将如图2所示的带有可识别标记图形21的cam资料2曝光在基板上,并在曝光过程中点亮所有吸盘3上的内层靶标光源31,在基板背面打上内层靶标标记图形14,如图5所示,记录当前cam内可识别标记图形21的cam坐标系坐标p
c0
、p
c1
…
p
cn
、cam坐标系到激光直接成像设备的成像坐标系的变换矩阵martrix
c2e
;
[0037]
s3、通过测量系统依次抓取显影在基板上的cam标记图形13位置以及基板标记位置,记录cam标记图形13在测量坐标系中的位置为p
m0
、p
m1
…
p
mn
,记录基板标记位置在测量坐标系中为l
m0
、l
m1
…
l
mn
;具体地说,如图6所示,所述测量系统的吸盘3上1-9的mark点为内层靶标光源31,所述基板通过吸盘3上的定位条32确定位置。其中x移动轴和y移动轴可以如图6所示的均设置在吸盘3下方,还可以通过设置龙门架,设置在吸盘3的下方和龙门架上,只要保证具有两个垂直且使系统中吸盘3和成像单元在平面内相对运动的坐标轴即可。
[0038]
s4、将基板垂直或水平翻面后,使用测量系统依次抓取显影在翻转后基板上的内层靶标标记图形14位置以及基板标记位置,如图3所示,记录内层靶标标记图形14在测量坐标系中的位置为m
′
m0
、m
′
m1
…m′
mn
,记录翻面后基板标记位置在测量坐标系中为l
′
m0
、l
′
m1
…
l
′
mn
;
[0039]
s5、根据各个步骤的标记或靶标测量坐标值,通过坐标线性变换,计算出内层靶标在成像坐标系的精确位置信息。
[0040]
步骤s5具体步骤如下:
[0041]
由翻面前后的基板标记位置计算出翻面前后基板图形的变换martrix
flip
:
[0042]
martrix
flip
=[l
′
m0
,l
′
m1
...l
′
mn
]
→
[l
m0
,l
m1
...l
mn
]
[0043]
将此变换代入到s4步骤记录的内层靶标标记图形14位置进行计算即可计算出内层靶标标记图形14在测量基板正面101时位于测量坐标系的位置m
m0
,m
m1
...m
mn
:
[0044][0045]
由s2步骤记录的cam坐标系到成像坐标系的变换以及cam内可识别标记图形21的cam坐标系坐标可计算出cam内可识别标记图形21在曝光后位于成像坐标系的坐标p
e0
、p
e1
...p
en
:
[0046][0047]
由s3步骤记录的cam内可识别标记图形21在测量坐标系中的位置p
m0
、p
m1
…
p
mn
以及上步所计算的cam内可识别标记图形21在曝光后位于成像坐标系的坐标可计算出测量坐标系到成像坐标系的变换:
[0048]
martrix
m2e
=[p
m0
,p
m1
...p
mn
]
→
[p
e0
,p
e1
...p
en
]
[0049]
使用上述变换矩阵转换内层靶标坐标到成像坐标m
e0
,m
e1
...m
en
:
[0050][0051]
至此内层靶标位于成像坐标系的精确坐标标定完成。
[0052]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。