技术特征:
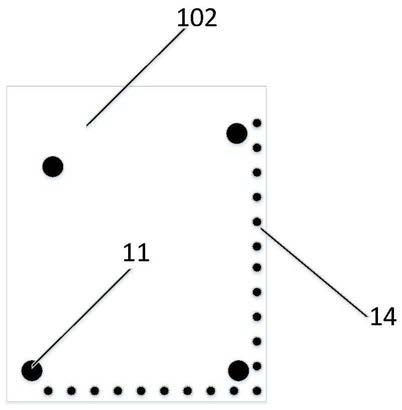
1.一种激光直接成像设备内层靶标标定方法,其特征在于,包括以下步骤:s1、选择一个基板放置于吸盘(3)上,所述基板正面(101)和基板反面(102)均有通过机器视觉识别的标记,其位置作为基板标记位置;s2、通过激光直接成像设备将带有可识别标记图形(21)的cam资料(2)曝光在基板上,并在曝光过程中点亮所有吸盘(3)上的内层靶标光源(31),在基板背面打上内层靶标标记图形(14),记录当前cam内可识别标记图形(21)的cam坐标系坐标p
c0
、p
c1
…
p
cn
、cam坐标系到激光直接成像设备的成像坐标系的变换矩阵martrix
c2e
;s3、通过测量系统依次抓取显影在基板上的cam标记图形(13)位置以及基板标记位置,记录cam标记图形(13)在测量坐标系中的位置为p
m0
、p
m1
…
p
mn
,记录基板标记位置在测量坐标系中为l
m0
、l
m1
…
l
mn
;s4、将基板垂直或水平翻面后,使用测量系统依次抓取显影在翻转后基板上的内层靶标标记图形(14)位置以及基板标记位置,记录内层靶标标记图形(14)在测量坐标系中的位置为m
′
m0
、m
′
m1
…
m
′
mn
,记录翻面后基板标记位置在测量坐标系中为l
′
m0
、l
′
m1
…
l
′
mn
;s5、根据各个步骤的标记或靶标测量坐标值,通过坐标线性变换,计算出内层靶标在成像坐标系的精确位置信息。2.根据权利要求1所述的一种激光直接成像设备内层靶标标定方法,其特征在于,步骤s5具体为:由翻面前后的基板标记位置计算出翻面前后基板图形的变换martrix
flip
:martrix
flip
=[l
′
m0
,l
′
m1
…
l
′
mn
]
→
[l
m0
,l
m1
…
l
mn
]将此变换代入到s4步骤记录的内层靶标标记图形(14)位置进行计算即可计算出内层靶标标记图形(14)在测量基板正面(101)时位于测量坐标系的位置m
m0
,m
m1
…
m
mn
:由s2步骤记录的cam坐标系到成像坐标系的变换以及cam内可识别标记图形(21)的cam坐标系坐标可计算出ccam内可识别标记图形(21)在曝光后位于成像坐标系的坐标p
e0
、p
e1
…
p
en
:由s3步骤记录的cam内可识别标记图形(21)在测量坐标系中的位置p
m0
、p
m1
…
p
mn
以及上步所计算的cam内可识别标记图形(21)在曝光后位于成像坐标系的坐标可计算出测量坐标系到成像坐标系的变换:martrix
m2e
=[p
m0
,p
m1
…
p
mn
]
→
[p
e0
,p
e1
…
p
en
]使用上述变换矩阵转换内层靶标坐标到成像坐标m
e0
,m
e1
…
m
en
:3.根据权利要求1所述的一种激光直接成像设备内层靶标标定方法,其特征在于,所述标记为通孔(11)和或基板的边角(12)。4.根据权利要求1或3所述的一种激光直接成像设备内层靶标标定方法,其特征在于,所述标记至少3个。
技术总结
一种激光直接成像设备内层靶标标定方法,包括以下步骤:S1、选择基板放置于吸盘上,所述基板正面和基板反面均有通过机器视觉识别的标记,其位置作为基板标记位置;S2、通过激光直接成像设备将带有可识别标记图形的CAM资料曝光在基板上,并在曝光过程中点亮所有吸盘上的内层靶标光源,在基板背面打上内层靶标标记图形;S3、通过测量系统依次抓取显影在基板上的CAM标记图形位置以及基板标记位置;S4、将基板垂直或水平翻面后,使用测量系统依次抓取显影在翻转后基板上的内层靶标标记图形位置以及基板标记位置;S5、根据各个步骤的标记或靶标测量坐标值,通过坐标线性变换,计算出内层靶标在成像坐标系的精确位置信息。本发明可提高标定的精度。标定的精度。标定的精度。
技术研发人员:韩非 高明 陈修涛 董辉
受保护的技术使用者:合肥众群光电科技有限公司
技术研发日:2021.10.25
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。