技术特征:
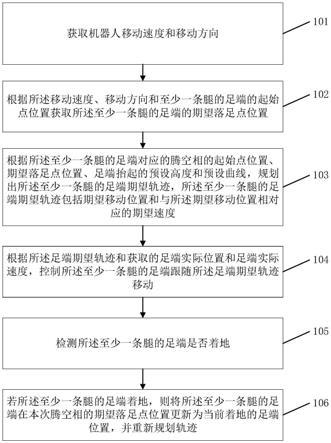
1.一种降低足式机器人抖动的方法,其特征在于,所述方法包括:获取机器人移动速度和移动方向;根据所述移动速度、移动方向和至少一条腿的足端的起始点位置获取所述至少一条腿的足端的期望落足点位置;根据所述至少一条腿的足端对应的腾空相的起始点位置、期望落足点位置、足端抬起的预设高度和预设曲线,规划出所述至少一条腿的足端期望轨迹,所述至少一条腿的足端期望轨迹包括期望移动位置和与所述期望移动位置相对应的期望速度;根据所述足端期望轨迹和获取的足端实际位置和足端实际速度,控制所述至少一条腿的足端跟随所述足端期望轨迹移动;检测所述至少一条腿的足端是否着地;若所述至少一条腿的足端着地,则将所述至少一条腿的足端在本次腾空相的期望落足点位置更新为当前着地的足端位置,并重新规划轨迹。2.根据权利要求1所述的降低足式机器人抖动的方法,其特征在于,所述方法还包括:通过检测所述至少一条腿所对应的至少一个动力模组的动力输出单元的转动角度和转动速度,并根据所述转动角度和转动速度计算获取所述至少一条腿所对应的足端实际位置和足端实际速度。3.根据权利要求2所述的降低足式机器人抖动的方法,其特征在于,所述根据所述足端期望轨迹和获取的足端实际位置和足端实际速度,控制所述至少一条腿的足端跟随所述足端期望轨迹移动,包括:通过所述足端期望轨迹、所述足端实际位置和所述足端实际速度计算出所述至少一条腿的至少一个动力模组的关节力矩,以控制所述至少一条腿的足端按照规划出的轨迹移动;所述至少一个动力模组的关节力矩计算公式:关节力矩t=j[k
p
(p_ref-p) k
d
(v_ref-v)] t_ff;其中:j表示雅可比矩阵;k
p
表示比例参数,p_ref表示机器人每条腿的足端期望移动位置,p表示机器人每条腿的足端实际移动位置;k
d
表示微分参数,v_ref表示机器人每条腿的足端期望速度,v表示机器人每条腿的足端实际速度;t_ff表示重力补偿力矩,所述重力补偿力矩用于补偿机器人每条腿的腿部的重力和/或足端的摩擦力。4.根据权利要求1所述的降低足式机器人抖动的方法,其特征在于,所述检测所述至少一条腿的足端是否着地,包括:通过触底检测算法检测所述至少一条腿的足端是否着地;或,通过足端力传感器检测所述至少一条腿的足端是否着地。5.根据权利要求1所述的降低足式机器人抖动的方法,其特征在于,所述重新规划轨迹,包括:将所述至少一条腿当前着地的足端位置确定为所述至少一条腿足端下次移动的起始点位置;
根据所述至少一条腿的足端对应的腾空相的起始点位置、期望落足点位置、足端抬起的预设高度和预设曲线对所述至少一条腿的足端对应的轨迹进行重新规划。6.一种降低足式机器人抖动的装置,其特征在于,所述装置包括:第一获取单元,用于获取机器人移动速度和移动方向;第二获取单元,用于根据所述移动速度、移动方向和至少一条腿的足端的起始点位置获取所述至少一条腿的足端的期望落足点位置;规划单元,用于根据所述至少一条腿的足端对应的腾空相的起始点位置、期望落足点位置、足端抬起的预设高度和预设曲线,规划出所述至少一条腿的足端期望轨迹,所述至少一条腿的足端期望轨迹包括期望移动位置和与所述期望移动位置相对应的期望速度;控制单元,用于根据所述足端期望轨迹和获取的足端实际位置和足端实际速度,控制所述至少一条腿的足端跟随所述足端期望轨迹移动;检测单元,用于检测所述至少一条腿的足端是否着地;更新单元,用于当所述检测单元确定所述至少一条腿的足端着地时,则将所述至少一条腿的足端在本次腾空相的期望落足点位置更新为当前着地的足端位置,并重新规划轨迹。7.根据权利要求6所述的降低足式机器人抖动的装置,其特征在于,所述装置还包括:计算单元,用于通过检测所述至少一条腿所对应的至少一个动力模组的动力输出单元的转动角度和转动速度,并根据所述转动角度和转动速度计算获取所述至少一条腿所对应的足端实际位置和足端实际速度。8.根据权利要求7所述的降低足式机器人抖动的装置,其特征在于,所述控制单元包括:计算模块,用于通过所述足端期望轨迹、所述足端实际位置和所述足端实际速度计算出所述至少一条腿的至少一个动力模组的关节力矩,以控制所述至少一条腿的足端按照规划出的轨迹移动;所述至少一个动力模组的关节力矩计算公式:关节力矩t=j[k
p
(p_ref-p) k
d
(v_ref-v)] t_ff;其中:j表示雅可比矩阵;k
p
表示比例参数,p_ref表示机器人每条腿的足端期望落足点位置,p表示机器人每条腿的足端实际落足点位置;k
d
表示微分参数,v_ref表示机器人每条腿的足端期望速度,v表示机器人每条腿的足端实际速度;t_ff表示重力补偿力矩,所述重力补偿力矩用于补偿机器人每条腿的腿部的重力和/或足端的摩擦力。9.一种降低足式机器人抖动的设备,其特征在于,所述设备包括:处理器、存储器以及总线;所述处理器与所述存储器以及所述总线相连;所述存储器保存有程序,所述处理器调用所述程序以执行如权利要求1至5中任一项所述的方法。10.一种计算机可读存储介质,所述计算机可读存储介质上保存有程序,所述程序在计算机上执行时执行如权利要求1至5中任一项所述方法。
技术总结
本申请实施例公开了一种降低足式机器人抖动的方法及相关装置,能够有效的减少由于抖动对足式机器人内部机械结构造成损伤,从而提高足式机器人的使用寿命。本申请包括:获取机器人移动速度和移动方向;根据移动速度、移动方向和至少一条腿的足端的起始点位置获取至少一条腿的足端的期望落足点位置;根据至少一条腿的足端对应的腾空相的起始点位置、期望落足点位置、足端抬起的预设高度和预设曲线,规划出至少一条腿的足端期望轨迹,至少一条腿的足端期望轨迹包括期望移动位置和与期望移动位置相对应的期望速度;根据足端期望轨迹和获取的足端实际位置和足端实际速度,控制至少一条腿的足端跟随足端期望轨迹移动。条腿的足端跟随足端期望轨迹移动。条腿的足端跟随足端期望轨迹移动。
技术研发人员:吴国雄
受保护的技术使用者:深圳鹏行智能研究有限公司
技术研发日:2021.10.20
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。