一种基于tebs系统的挂车制动控制优化方法
技术领域
1.本发明涉及车辆制动控制技术领域,尤其涉及一种基于tebs系统的挂车制动控制优化方法。
背景技术:
2.随着汽车行业的不断发展,汽车运动性能的不断改进,如何在保证车辆行驶过程安全的前提下获得更快的速度,成为了每一个汽车公司不变的追求。在高速度行驶过程中影响行车安全的一个关键功能为车辆的制动功能。在车辆制动时,相关制动系统需要及时做出配合,使其能安全、快速、稳定地停下来。使车辆做到精准制动,是关乎着驾驶员和乘车人员,以及道路上其他人性命的问题。
3.区别于小型化的乘用车,大型商用挂车载荷大,车身长,驾驶员视野狭窄,行车过程中的安全隐患更多,对制动系统的要求也更高。因此,近年来一种用于挂车的电子制动系统(electronically controlled brake system,tebs),集成了制动控制、防抱死制动系统(antilock brake system,abs)和驱动防滑系统(acceletation slip regulation,asr)的基本功能,在大型挂车平台上逐渐普及。不仅拥有更短的制动响应时间,也提高了车辆制动时的反应速度,减少了制动距离等。并拥有更好的制动稳定性和舒适性,系统零部件的标准化和高度集成化,降低了生产及安装成本。因此基于tebs系统,在已有的硬件基础上,对制动控制的过程进行进一步的优化,具有重要的现实意义。
4.现有的车辆制动控制中最常用的汽车电子制动系统——abs系统是通过轮速感应器传来的脉冲变动来掌握车轮的运行状况,当某一个车轮可能产生抱死状态时发出快速指令来达到控制刹车,在挂车的行驶场景中并不不适用。此外易受到外界扰动因素影响,不能很好地保障挂车的行驶安全。
技术实现要素:
5.本发明针对现有技术存在的不足,提供一种基于tebs系统的挂车制动控制优化方法,该方法面向tebs系统,在不添加额外类型传感器的基础上进行制动控制的优化,具有成本低、实时性高、控制精度高等特点。
6.本发明的目的是通过以下技术方案来实现的:一种基于tebs系统的挂车制动控制优化方法,该方法包括以下步骤:
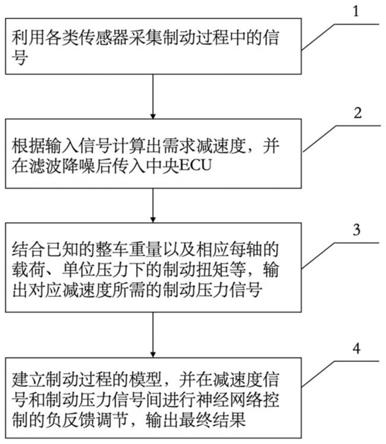
7.(1)利用挂车tebs系统中的行程传感器采集驾驶员促动制动踏板时的信号,包括促动过程中的踏板速度信号v(t)和踏板行程信号s(t);利用进气压力传感器根据发动机负荷状态采集进气歧管内的绝对压力信号f(t);利用abs传感器采集急刹时车轮的转速信号vw(t);
8.(2)将采集的踏板速度信号v(t)、踏板行程信号s(t)、绝对压力信号f(t)和车轮转速信号vw(t)输入中央ecu进行预处理以提高信号质量,具体如下:
9.(2.1)进行滤波降噪处理以提高信号质量,减少信号噪声;
10.(2.2)提取挂车制动的有效信号,通过踏板速度信号v(t)和踏板行程信号s(t)计算出制动减速度信号a(t);
11.(3)利用步骤(2)得到的制动减速度信号a(t)、绝对压力信号f(t)和车轮转速信号vw(t),结合已知的整车重量以及相应每根挂车车轴的载荷、制动器单位压力下的制动扭矩,输出对应制动减速度需要的制动气室的制动压力信号f(t);
12.(4)在步骤(3)输入信号a(t)和输出信号f(t)的过程中,加入神经网络内模控制;将神经网络控制模块与被控对象并联连接,偏差值信号作为反馈信号,并且进行靠视觉反馈的人工控制器负反馈调节,通过控制优化以获得期望的鲁棒性和闭合回路的跟踪响应特性;具体为:比较输出的制动压力信号f(t)和实际制动气室压力传感器采集的压力信号f
′
(t)之间的偏差,偏差值信号为error(t),error(t)经过神经网络控制模块控制后得到调节信号δ(t),对输入信号a(t)做一个滚动优化动态调整,得到调整后的制动减速度信号a
′
(t)=a(t)-δ(t),再次进行步骤(3)的操作,输出调整后的制动压力信号f
′
(t)。
13.进一步地,所述步骤(3)中,制动压力信号t时刻制动压力f计算公式如下:
[0014][0015]
式中:p1为制动管路的压力(pa);p0为推出压耗(pa);ac为制动气室面积(m2);ηm为气室-蹄制动器的制动效率;e为制动器制动效能因数;r为制动鼓半径(m);r为制动半径(m);ρ为制动气室和制动气蹄间杠杆比。
[0016]
进一步地,所述步骤(4)中,所述神经网络控制模块采用模糊控制神经网络模型,具体实现如下:
[0017]
第1层为输入层,输入信号为偏差值信号error(t)和制动压力信号f(t);
[0018]
第2层为隶属度函数生成层,将2个输入变量分为5个模糊语言值{zero,small,middle,big,very big},该层有10个节点,分别是2个输入变量的模糊语言值,输出是输入值属于该节点语言变量的隶属度值,隶属度函数选用高斯函数;
[0019]
第3层为推理层,共有25个节点,每个节点代表一条模糊规则,其输出为:
[0020]
αj=min{μ1,μ2,...,μn,...,μ
10
}
[0021]
其中αj为第3层j节点的输出;μn为第2层第n个节点对第3层j节点的输入;
[0022]
第4层为中间层,与第3层节点数相同,进行归一化处理,其输出为:
[0023][0024]
其中βj为第4层j节点的输出;
[0025]
第5层为结果输出层,该层有1个节点,进行清晰化处理,其输出为:
[0026][0027]
其中wj为第5层唯一节点至第4层第j个节点的权值;y为第5层的输出变量,即调节信号δ(t)。
[0028]
进一步地,所述tebs系统增加液力缓速器进行辅助制动;
[0029]
所述液力缓速器将下坡行驶挂车的部分运动势能转换为缓速器工作介质的热能,并散发到大气中,从而减少鼓式主动制动刹车的机械摩擦,避免机械刹车系统热失效,实现挂车在长下坡路段的低速稳定行驶;
[0030]
挂车由较高速度v1减速至下坡限定安全速度v2所释放的平动动能δe
a1
为:
[0031][0032]
其中m为挂车质量,kg;
[0033]
在下坡路段因路面垂直下降高度h1所引起重力势能变化量δe
h1
为:
[0034]
δe
h1
=gmh1[0035]
其中g为重力常数;
[0036]
液力缓速器在额定转速范围内,假定输出功率为额定值,所做的功w
t1
为:
[0037]wt1
=p
t
t1[0038]
其中p
t
为液力缓速器额定功率,t1为挂车减速下坡的时间;
[0039]
根据能量平衡定律,理想状态下,主动制动系统不参与制动,由液力缓速器提供恒速下坡的制动力;
[0040][0041]
其中wb为主动刹车能;
[0042]
液力缓速器单位时间所做的功dw
t1
为:
[0043][0044]
其中t为液力缓速器最大额定转矩,nm;n
t
为液力缓速器转子某一时刻的转速,r/min;i为车速与液力缓速器转子间的比例;v
t
为某一时刻挂车车速;a为挂车下坡加速度;
[0045]
由于牵引车驱动轮制动力矩大于半挂车轮制动力矩,半挂车对牵引车形成附加推力,对牵引车的操纵安全产生不利影响;用驱动后桥替代半挂车轮轴,并把液力缓速器安装在半挂车的驱动后桥上,在无需主动制动系统参与的情况下,液力缓速器可长时间制动,其产生的制动力直接作用于半挂车承载轮,对挂车产生后拖制动作用。
[0046]
进一步地,所述步骤(4)中,在控制优化过程中,加入液力缓速器的负反馈调节,使得挂车下坡路段的制动过程更加安全和平缓。
[0047]
本发明的优点及有益效果如下:本发明仅利用tebs系统已有的行程传感器、压力传感器、气压传感器、abs传感器和ecu进行制动控制的优化,在刹车过程中,将输出的制动压力导致的实际减速度与需求进行对比,进行神经网络控制的反馈调节,实现更准确稳定的制动控制。并添加液力缓速器装置,可以使制动过程更加安全和平稳。区别于现有的制动方法,本发明所提方法具有能抑制内外扰动量对制动压力产生影响的能力,且能够及时反馈,并据此调整、修改下一步的实施决策。本发明能够在硬件资源受限的情况下有效实施,操作简单、实时性好且具有较高的控制精度,易在实际系统中实现。
附图说明
[0048]
图1为本发明方法的步骤流程图;
[0049]
图2为本发明方法的系统结构图,用于进一步解释本发明实施例具体过程;
[0050]
图3为负反馈调节中的神经网络模型结构。
具体实施方式
[0051]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
如图1、2所示,本发明实施例提供的一种基于tebs系统的制动控制优化方法,包括以下步骤:
[0053]
(1)利用挂车tebs系统中的行程传感器采集驾驶员促动制动踏板时的信号,包括促动过程中的踏板速度信号v(t)和踏板行程信号s(t);利用进气压力传感器根据发动机负荷状态采集进气歧管内的绝对压力信号f(t);利用abs传感器采集急刹时车轮的转速信号vw(t);
[0054]
(2)将采集的踏板速度信号v(t)、踏板行程信号s(t)、绝对压力信号f(t)和车轮转速信号vw(t)输入中央ecu进行预处理以提高信号质量,具体如下:
[0055]
(2.1)进行滤波降噪处理以提高信号质量,减少信号噪声;
[0056]
(2.2)提取挂车制动的有效信号,通过踏板速度信号v(t)和踏板行程信号s(t)计算出制动减速度信号a(t);
[0057]
(3)利用步骤(2)得到的制动减速度信号a(t)、绝对压力信号f(t)和车轮转速信号vw(t),结合已知的整车重量以及相应每根挂车车轴的载荷、制动器单位压力下的制动扭矩,输出对应制动减速度需要的制动气室的制动压力信号f(t);
[0058]
具体地,制动压力信号t时刻制动压力f可采用以下计算公式:
[0059][0060]
式中:p1为制动管路的压力(pa);p0为推出压耗(pa);ac为制动气室面积(m2);ηm为气室-蹄制动器的制动效率;e为制动器制动效能因数;r为制动鼓半径(m);r为制动半径(m);ρ为制动气室和制动气蹄间杠杆比;
[0061]
(4)在步骤(3)输入信号a(t)和输出信号f(t)的过程中,加入神经网络内模控制;将神经网络控制模块与被控对象并联连接,偏差值信号作为反馈信号,并且进行靠视觉反馈的人工控制器负反馈调节,通过控制优化以获得期望的鲁棒性和闭合回路的跟踪响应特性;具体为:比较输出的制动压力信号f(t)和实际制动气室压力传感器采集的压力信号f
′
(t)之间的偏差,偏差值信号为error(t),error(t)经过神经网络控制模块控制后得到调节信号δ(t),对输入信号a(t)做一个滚动优化动态调整,得到调整后的制动减速度信号a
′
(t)=a(t)-δ(t),再次进行步骤(3)的操作,输出调整后的制动压力信号f
′
(t)。
[0062]
在一个实施例中,神经网络控制模块采用如下模糊控制神经网络模型,参见图3:
[0063]
第1层为输入层,输入信号为偏差值信号error(t)和制动压力信号f(t);
[0064]
第2层为隶属度函数生成层,将2个输入变量分为5个模糊语言值{zero,small,middle,big,very big},该层有10个节点,分别是2个输入变量的模糊语言值,输出是输入值属于该节点语言变量的隶属度值,隶属度函数选用高斯函数;
[0065]
第3层为推理层,共有25个节点,每个节点代表一条模糊规则,其输出为:
[0066]
αj=min{μ1,μ2,
…
,μn,
…
,μ
10
}
[0067]
其中αj为第3层j节点的输出;μn为第2层第n个节点对第3层j节点的输入;
[0068]
第4层为中间层,与第3层节点数相同,进行归一化处理,其输出为:
[0069][0070]
其中βj为第4层j节点的输出;
[0071]
第5层为结果输出层,该层有1个节点,进行清晰化处理,其输出为:
[0072][0073]
其中wj为第5层唯一节点至第4层第j个节点的权值;y为第5层的输出变量,即调节信号δ(t)。
[0074]
进一步地,tebs系统还可以增加液力缓速器进行辅助制动;
[0075]
液力缓速器将下坡行驶挂车的部分运动势能转换为缓速器工作介质的热能,并散发到大气中,从而减少鼓式主动制动刹车的机械摩擦,避免机械刹车系统热失效,实现挂车在长下坡路段的低速稳定行驶;
[0076]
挂车由较高速度v1减速至下坡限定安全速度v2所释放的平动动能δe
a1
为:
[0077][0078]
其中m为挂车质量,kg;
[0079]
在下坡路段因路面垂直下降高度h1所引起重力势能变化量δe
h1
为:
[0080]
δe
h1
=gmh1[0081]
其中g为重力常数;
[0082]
液力缓速器在额定转速范围内,假定输出功率为额定值,所做的功w
t1
为:
[0083]wt1
=p
t
t1[0084]
其中p
t
为液力缓速器额定功率,t1为挂车减速下坡的时间;
[0085]
根据能量平衡定律,理想状态下,主动制动系统不参与制动,由液力缓速器提供恒速下坡的制动力;
[0086][0087]
其中wb为主动刹车能;
[0088]
液力缓速器单位时间所做的功dw
t1
为:
[0089][0090]
其中t为液力缓速器最大额定转矩,nm;n
t
为液力缓速器转子某一时刻的转速,r/min;i为车速与液力缓速器转子间的比例;v
t
为某一时刻挂车车速;a为挂车下坡加速度;
[0091]
由于牵引车驱动轮制动力矩大于半挂车轮制动力矩,半挂车对牵引车形成附加推力,对牵引车的操纵安全产生不利影响;用驱动后桥替代半挂车轮轴,并把液力缓速器安装在半挂车的驱动后桥上,在无需主动制动系统参与的情况下,液力缓速器可长时间制动,其产生的制动力直接作用于半挂车承载轮,对挂车产生后拖制动作用。
[0092]
在步骤(4)的控制优化过程中,可以加入液力缓速器的负反馈调节,使得挂车下坡路段的制动过程更加安全和平缓。
[0093]
上述实施例用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
