1.本发明涉及肢体康复技术领域,具体为一种多功能护理肢体康复系统、方法及终端。
背景技术:
2.骨折的患者在康复的早期,需要进行活动锻炼,以促进血液循环,加速肿胀消退,对于偏瘫或单侧肢体乏力的患者同样需要进行康复训练,以防止关节僵硬,肌肉萎缩;
3.其主要也是针对肌肉萎缩,带来的一些负面影响,所以我们医护人员也是尽量减少肌肉萎缩带来的危害,降低后期由于患者身体康复不全面,从而造成国家的任务量过大,人们家庭生活受到影响!
4.但是现有的装置需要病人的身体恢复到较高的水准后,才能进行后续的康复训练,影响了病人肢体恢复的效率,所以我们对这些情况,为避免上述技术问题,确有必要提供一种多功能护理肢体康复系统、方法及终端以克服现有技术中的所述缺陷。
技术实现要素:
5.本发明提供一种多功能护理肢体康复系统、方法及终端,可以有效解决上述背景技术中提出的需要病人的身体恢复到较高的水准后,才能进行后续的康复训练,影响了病人肢体恢复的效率的问题。
6.为实现上述目的,本发明提供如下技术方案:一种多功能护理肢体康复系统、方法及终端,包括支架,所述支架一端通过螺栓固定连接有底架,所述支架顶端一侧位置处对称熔接有固定块,两个所述固定块内壁均转动连接有转杆,所述转杆两端均熔接有活动架,所述活动架一端等距卡接有凸杆,所述活动架两端均设置有肩抬举机构,所述肩抬举机构包括框架;
7.所述活动架两端均通过螺栓固定连接有框架,两个所述框架内部均转动连接有第一蜗杆,两个所述框架顶端对应第一蜗杆顶部位置处均转动连接有传动轮,两个所述传动轮外侧均套接有传动带,一个所述框架顶端对应传动轮顶部位置处安装有旋转电机,两个所述框架内部均活动连接有竖板,两个所述竖板一端均转动连接有转筒,两个所述转筒内壁均通过螺纹连接有连接筒,两个所述连接筒相邻一端对应凸杆一侧位置处均卡接有抬举杆,所述抬举杆外侧活动套接有套筒,所述套筒外侧固定套接有套环,所述套环外侧通过螺栓固定连接有控制开关;
8.所述竖板一端开设有槽口,所述槽口内部滑动连接有活动块,所述活动块顶端通过螺栓固定连接有磁板,且槽口顶端对应磁板顶部位置处通过螺栓固定连接有电磁铁,所述活动块底端对应槽口内部位置处对称卡接有支撑弹簧,所述竖板一端对应槽口底部位置处转动连接有连接杆,所述连接杆一端通过螺栓固定连接有第一涡轮,所述活动块内壁转动连接有转动杆,所述转动杆外侧和连接杆外侧均固定套接有动力轮,位于所述活动架同一侧的两个动力轮外侧均套接有皮带,所述竖板一端对应槽口和连接杆之间对称活动连接
有滑块,且两个滑块之间均熔接有张紧弹簧,两个所述滑块一端均转动连接有导轮,所述框架内壁对应活动块一侧位置处开设有齿槽,所述转动杆另一端对应齿槽内部位置处熔接有动力齿轮;
9.所述支架顶端另一侧位置处通过螺栓固定连接有连接块,所述连接块和固定块之间转动连接有调节杆,且调节杆一端贯穿连接块一端,所述调节杆一端熔接有旋钮,所述调节杆外侧通过螺纹连接有移动块,所述移动块一端转动连接有转动板,所述支架两端均通过螺栓固定连接有放置板。
10.优选的,所述第一蜗杆的转轴一端贯穿框架与传动轮一端相连接,所述旋转电机的输出轴与第一蜗杆的转轴一端相连接,所述旋转电机通过外部电源进行供电,所述控制开关通过外部电源进行供电,且控制开关的信号输出端与电磁铁的信号输入端相连接,所述电磁铁与磁板相反排斥。
11.优选的,所述第一涡轮的轴心与第一蜗杆的轴心位于同一竖线上,所述导轮外侧与皮带一端相贴合,所述动力齿轮与齿槽啮合连接,所述转动板另一端与活动架一端转动连接,所述移动块底端与支架顶端滑动连接。
12.与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:
13.1、设置了肩抬举机构,通过放置板方便将活动架折叠收纳在支架上,同时通过旋钮带动调节杆旋转,推动移动块移动,并通过转动板的配合,拉动活动架旋转,调整了活动架与支架之间的角度,提高了肩抬举康复锻炼的灵活性,方便不同的病人进行康复锻炼,增加了适应性;
14.通过旋转电机、传动轮和传动带的配合,使两个第一蜗杆一同旋转,然后通过控制开关对电磁铁进行供电产生磁力,并通过磁板的配合产生斥力,迫使竖板推动抬举杆滑出凸杆,同时在竖板移动的过程中,带着第一涡轮与第一蜗杆相贴合,进一步增加了动力的利用效率,方便第一蜗杆带动第一涡轮旋转,再通过动力轮、皮带和连接杆的配合,带动动力齿轮在齿槽内部旋转,迫使竖板沿着框架滑动,调整了抬举杆的位置,降低病人移动抬举杆所需要的体力,方便上肢虚弱的病人进行康复锻炼,另外在竖板移动的同时,通过张紧弹簧伸缩的特性,推动两个滑块和导轮移动,始终使皮带保持绷紧,便于对动力进行传递,增加了适应性;
15.通过支撑弹簧伸缩的特性,推动竖板复位,解除第一涡轮与第一蜗杆之间的传动,将抬举杆重新嵌入凸杆之间进行固定,如此反复,使病人被动进行肩抬举,方便虚弱的病人进行康复锻炼,提高上肢恢复的效率,当病人的上肢有所恢复后,通过转筒带动连接筒旋转,解除对抬举杆的固定,并通过套筒将套环和控制开关滑出抬举杆,使抬举杆恢复空杆,方便病人主动进行肩抬举康复锻炼,此外随着病人上肢恢复的进度,逐渐在抬举杆上增加配重环,提高抬举杆的重量,增加了抬举杆的适应性,以满足病人锻炼的需求,进一步提高了康复锻炼的效果。
16.2、设置了位置调节机构,通过踏板带动主动轮旋转,并通过松紧轮和履带的配合,对动力进行传递,带动从动轮、传动杆和滚轮旋转,从而拉动移动座和放置架移动,便于根据需要调整座椅的位置,方便病人移动抬举杆,增加了肩抬举康复锻炼的便捷性;
17.另外通过转盘带动横杆旋转,并通过第二涡轮的配合,带动两个第二蜗杆一同旋转,从而推动升降杆、支撑板和座椅移动,便于根据病人的需求,调整座椅的高度,提高了座
椅的适应性,另外在座椅移动时,转动收纳筒,使收纳筒带着伸缩杆、安装块和松紧轮移动,保持履带的绷紧度,保证对动力的传递效率。
18.3、设置了锁死固定机构,通过推杆推动垫板和推块移动,并通过斜块的配合,迫使顶板、滑杆和齿条下降,使齿条与限位齿轮啮合,同时通过嵌入槽和齿凸的配合,对限位齿轮进行限位,从而将移动座锁死固定,避免移动座移动,增加了座椅的稳定性;
19.此外,通过凸型槽的配合,方便推杆和凸块移动,从而将推杆固定在限位槽内部,对推块进行限位,保证了对移动座的限位效果,当需要移动时,将推杆滑出限位槽,解除对推块的限位,再通过复位弹簧伸缩的特性,推动顶板、滑杆、齿条和斜块复位,重新恢复移动座的移动效。
20.综合所述,通过肩抬举机构方便虚弱的病人提前进行被动抬举训练,提高病人上肢的恢复效率,并且在病人上肢恢复到一定程度后,可以进行主动抬举训练,进一步增加了病人肢体康复的效果,同时通过位置调节机构和锁死固定机构的配合,在病人进行抬举训练时,可以及时调整位置,增加了肩抬举康复锻炼的便捷性。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
22.在附图中:
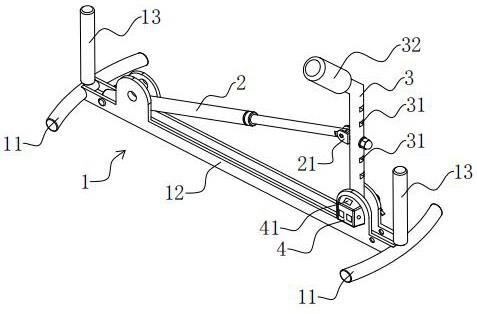
23.图1是本发明的结构示意图;
24.图2是本发明套环的安装结构示意图;
25.图3是本发明转杆的安装结构示意图;
26.图4是本发明转动杆的安装结构示意图;
27.图5是本发明肩抬举机构的结构示意图;
28.图6是本发明限位板的安装结构示意图;
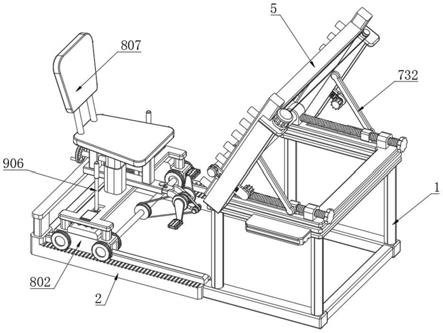
29.图7是本发明位置调节机构的结构示意图;
30.图8是本发明锁死固定机构的结构示意图;
31.图9是本发明滑块的安装结构示意图。
32.图中标号:1、支架;2、底架;3、固定块;4、转杆;5、活动架;6、凸杆;
33.7、肩抬举机构;701、框架;702、第一蜗杆;703、传动轮;704、传动带;705、旋转电机;706、竖板;707、转筒;708、连接筒;709、抬举杆;710、套筒;711、套环;712、控制开关;713、槽口;714、活动块;715、磁板;716、电磁铁;717、支撑弹簧;718、连接杆;719、第一涡轮;720、转动杆;721、动力轮;722、皮带;723、滑块;724、张紧弹簧;725、导轮;726、齿槽;727、动力齿轮;728、连接块;729、调节杆;730、旋钮;731、移动块;732、转动板;733、放置板;
34.8、位置调节机构;801、限位板;802、移动座;803、滚轮;804、放置架;805、第二蜗杆;806、升降杆;807、座椅;808、支撑板;809、横杆;810、第二涡轮;811、转盘;812、横板;813、延长板;814、固定板;815、踏板;816、主动轮;817、收纳筒;818、伸缩杆;819、安装块;820、松紧轮;821、传动杆;822、从动轮;823、履带;
35.9、锁死固定机构;901、滑槽;902、推块;903、垫板;904、凸型槽;905、滑块;906、推杆;907、限位槽;908、滑杆;909、顶板;910、斜块;911、复位弹簧;912、齿条;913、限位齿轮;
914、嵌入槽;915、齿凸。
具体实施方式
36.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
37.实施例:如图1-9所示,本发明提供一种技术方案,一种多功能护理肢体康复系统、方法及终端,包括支架1,支架1一端通过螺栓固定连接有底架2,支架1顶端一侧位置处对称熔接有固定块3,两个固定块3内壁均转动连接有转杆4,转杆4两端均熔接有活动架5,活动架5一端等距卡接有凸杆6,活动架5两端均设置有肩抬举机构7,肩抬举机构7包括框架701、第一蜗杆702、传动轮703、传动带704、旋转电机705、竖板706、转筒707、连接筒708、抬举杆709、套筒710、套环711、控制开关712、槽口713、活动块714、磁板715、电磁铁716、支撑弹簧717、连接杆718、第一涡轮719、转动杆720、动力轮721、皮带722、滑块723、张紧弹簧724、导轮725、齿槽726、动力齿轮727、连接块728、调节杆729、旋钮730、移动块731、转动板732和放置板733;
38.活动架5两端均通过螺栓固定连接有框架701,两个框架701内部均转动连接有第一蜗杆702,两个框架701顶端对应第一蜗杆702顶部位置处均转动连接有传动轮703,两个传动轮703外侧均套接有传动带704,一个框架701顶端对应传动轮703顶部位置处安装有旋转电机705,两个框架701内部均活动连接有竖板706,两个竖板706一端均转动连接有转筒707,两个转筒707内壁均通过螺纹连接有连接筒708,两个连接筒708相邻一端对应凸杆6一侧位置处均卡接有抬举杆709,抬举杆709外侧活动套接有套筒710,套筒710外侧固定套接有套环711,套环711外侧通过螺栓固定连接有控制开关712;
39.竖板706一端开设有槽口713,槽口713内部滑动连接有活动块714,活动块714顶端通过螺栓固定连接有磁板715,且槽口713顶端对应磁板715顶部位置处通过螺栓固定连接有电磁铁716,活动块714底端对应槽口713内部位置处对称卡接有支撑弹簧717,竖板706一端对应槽口713底部位置处转动连接有连接杆718,连接杆718一端通过螺栓固定连接有第一涡轮719,活动块714内壁转动连接有转动杆720,转动杆720外侧和连接杆718外侧均固定套接有动力轮721,位于活动架5同一侧的两个动力轮721外侧均套接有皮带722,竖板706一端对应槽口713和连接杆718之间对称活动连接有滑块723,且两个滑块723之间均熔接有张紧弹簧724,两个滑块723一端均转动连接有导轮725,框架701内壁对应活动块714一侧位置处开设有齿槽726,转动杆720另一端对应齿槽726内部位置处熔接有动力齿轮727,为了方便推动竖板706移动,第一蜗杆702的转轴一端贯穿框架701与传动轮703一端相连接,旋转电机705的输出轴与第一蜗杆702的转轴一端相连接,旋转电机705通过外部电源进行供电,控制开关712通过外部电源进行供电,且控制开关712的信号输出端与电磁铁716的信号输入端相连接,电磁铁716与磁板715相反排斥;
40.支架1顶端另一侧位置处通过螺栓固定连接有连接块728,连接块728和固定块3之间转动连接有调节杆729,且调节杆729一端贯穿连接块728一端,调节杆729一端熔接有旋钮730,调节杆729外侧通过螺纹连接有移动块731,移动块731一端转动连接有转动板732,支架1两端均通过螺栓固定连接有放置板733,为了方便对动力进行传递,第一涡轮719的轴心与第一蜗杆702的轴心位于同一竖线上,导轮725外侧与皮带722一端相贴合,动力齿轮
727与齿槽726啮合连接,转动板732另一端与活动架5一端转动连接,移动块731底端与支架1顶端滑动连接;
41.底架2顶端设置有位置调节机构8,位置调节机构8包括限位板801、移动座802、滚轮803、放置架804、第二蜗杆805、升降杆806、座椅807、支撑板808、横杆809、第二涡轮810、转盘811、横板812、延长板813、固定板814、踏板815、主动轮816、收纳筒817、伸缩杆818、安装块819、松紧轮820、传动杆821、从动轮822和履带823;
42.底架2顶端对称熔接有限位板801,两个限位板801外侧均活动连接有移动座802,移动座802两端均等距转动连接有滚轮803,两个移动座802顶端均通过螺栓固定连接有放置架804,放置架804顶端对称转动连接有第二蜗杆805,两个第二蜗杆805内壁均通过螺纹连接有升降杆806,升降杆806顶端转动连接有座椅807,座椅807底端对称熔接有支撑板808,两个支撑板808相邻一端均转动连接有横杆809,且横杆809外侧对应两个第二蜗杆805之间固定套接有第二涡轮810,横杆809一端熔接有转盘811;
43.两个支撑板808底端均熔接有横板812,横板812一端活动连接有延长板813,延长板813另一端通过螺栓对称固定连接有固定板814,两个固定板814相反一端均转动连接有踏板815,两个固定板814相邻一端均转动连接有主动轮816,两个固定板814一端均转动连接有收纳筒817,两个收纳筒817内壁均通过螺纹连接有伸缩杆818,两个伸缩杆818另一端均转动连接有安装块819,且两个安装块819相邻一端均转动连接有松紧轮820,两个滚轮803相邻一端均通过螺栓固定连接有传动杆821,传动杆821外侧固定套接有从动轮822,主动轮816外侧、松紧轮820外侧和从动轮822外侧均套接有履带823,为了调整座椅807的位置,滚轮803外侧和底架2顶端均开设有防滑纹,滚轮803底端与底架2顶端相贴合,第二蜗杆805与第二涡轮810相互啮合连接,横杆809一端贯穿支撑板808一端,横板812顶端通过螺纹固定连接有定位销,定位销底端贯穿横板812与延长板813顶端通过螺纹连接,主动轮816的转轴两端均贯穿固定板814与踏板815一端相连接;
44.放置架804顶端设置有锁死固定机构9,锁死固定机构9包括滑槽901、推块902、垫板903、凸型槽904、凸块905、推杆906、限位槽907、滑杆908、顶板909、斜块910、复位弹簧911、齿条912、限位齿轮913、嵌入槽914和齿凸915;
45.放置架804顶端对称开设有滑槽901,滑槽901内部滑动连接有推块902,推块902一端熔接有垫板903,垫板903顶端开设有凸型槽904,凸型槽904内部滑动连接有凸块905,且凸块905顶端通过螺栓固定连接有推杆906,滑槽901内壁对应推杆906一侧位置处等距开设有限位槽907;
46.移动座802顶端对称活动连接有滑杆908,两个滑杆908顶端均熔接有顶板909,顶板909顶端对应滑槽901顶部位置处熔接有斜块910,顶板909底端对应两个滑杆908之间固定连接有复位弹簧911,两个滑杆908底端对应移动座802内部位置处均熔接有齿条912,移动座802内部对应齿条912底部位置处转动连接有限位齿轮913,限位板801顶端对应限位齿轮913底部位置处开设有嵌入槽914,且嵌入槽914内部等距熔接有齿凸915,为了对移动座802进行限位,推块902一端开设有斜面,推块902的斜面与斜块910的斜面相贴合,凸块905的长度小于凸型槽904的长度,嵌入槽914通过齿凸915与限位齿轮913啮合连接。
47.其中一种多功能护理肢体康复方法,根据一种多功能护理肢体康复系统任一所需的系统使用的方法。
48.其中一种多功能护理肢体康复终端,根据一种多功能护理肢体康复系统任一所需的系统使用的终端。
49.本发明的工作原理及使用流程:首先,在活动架5折叠时,可以通过放置板733对活动架5进行支撑,提高活动架5在支架1上的稳定性,而在使用时,通过转动旋钮730带动调节杆729旋转,来推动移动块731移动,并使移动块731拉着转动板732旋转,带动活动架5旋转升起,改变了活动架5与支架1之间的角度,提高了肩抬举康复锻炼的灵活性,方便不同病人进行康复锻炼,增加了活动架5的适应性;
50.接着,病人端坐在座椅807上手握抬举杆709,启动旋转电机705带动第一蜗杆702旋转,并通过传动轮703和传动带704的配合,对动力进行传递,迫使两个第一蜗杆702一同旋转,然后根据需要推动套筒710,使套筒710带着套环711和控制开关712移动,从而调整了控制开关712在抬举杆709上的位置,更利于病人按动控制开关712,对电磁铁716进行供电,产生磁力,使电磁铁716与磁板715的磁极相等进行排斥,迫使竖板706推动抬举杆709移动;
51.接着,在竖板706移动的过程中,带动连接杆718和第一涡轮719移动,使第一涡轮719与第一蜗杆702相贴合,方便第一蜗杆702带动第一涡轮719和连接杆718旋转,然后通过皮带722对动力进行传递,带动动力轮721旋转,再通过转动杆720的联动,带动动力齿轮727在齿槽726内部旋转,推动竖板706沿着框架701滑动,调整了抬举杆709的位置,此外在竖板706移动的同时,通过张紧弹簧724伸缩的特性,推动两个滑块723和导轮725移动,始终使皮带722保持绷紧,便于对动力进行传递;
52.接着,当抬举杆709移动到需要的位置时,病人通过控制开关712停止对电磁铁716供电,使电磁铁716与磁板715之间失去排斥力,再通过支撑弹簧717伸缩的特性,推动竖板706和第一涡轮719复位,解除第一涡轮719与第一蜗杆702之间的传动,并将抬举杆709重新嵌入凸杆6之间进行固定,如此反复,使病人被动进行肩抬举,方便虚弱的病人进行康复锻炼,提高上肢恢复的效率;
53.接着,当病人上肢恢复到一定程度时,转动转筒707带动连接筒708旋转,解除对抬举杆709的固定,再滑动套筒710,将套环711和控制开关712滑出抬举杆709,使抬举杆709恢复成空杆状态,方便病人主动进行肩抬举康复锻炼,进一步提高了康复锻炼的效果,并且随着病人上肢恢复的进度,可以逐渐在抬举杆709上增加配重环,提高抬举杆709的重量,增加了抬举杆709的适应性,以满足病人锻炼的需求;接着,在肩抬举锻炼的过程中,病人踩动踏板815带动主动轮816旋转,然后通过履带823的配合,对动力进行传递,带动从动轮822和传动杆821旋转,迫使滚轮803带着移动座802和放置架804沿着底架2移动,便于根据需要改变座椅807的位置,更利于病人移动抬举杆709,提高了肩抬举康复锻炼的便捷性;
54.接着,转动转盘811带动横杆809旋转,并通过第二涡轮810的配合,对动力进行传递,带动两个第二蜗杆805一同旋转,从而推动升降杆806和支撑板808移动,便于根据病人的需求,调整座椅807的高度,提高了座椅807的适应性,另外在座椅807移动时,转动收纳筒817,使收纳筒817带着伸缩杆818、安装块819和松紧轮820移动,迫使松紧轮820对履带823进行支撑,提高了履带823的绷紧度,保证对动力的传递效率;
55.最后,推动推杆906带动垫板903和推块902在滑槽901内部移动,迫使推块902推动斜块910下降,再通过斜块910对顶板909的压力,推动滑杆908和齿条912下降,改变了齿条912在移动座802内部的位置,使齿条912与限位齿轮913啮合,同时嵌入槽914通过齿凸915
与限位齿轮913啮合,可以对限位齿轮913进行限位,防止限位齿轮913旋转,进而对移动座802进行锁死固定,避免移动座802移动,增加了座椅807的稳定性,此外通过凸型槽904的配合,方便推动推杆906和凸块905移动,将推杆906固定在限位槽907内部,对推块902进行限位,保证了对移动座802的固定效果,当需要移动时,将推杆906滑出限位槽907,解除对推块902的限位,再通过复位弹簧911伸缩的特性,推动顶板909上升,并且在顶板909上升的过程中,通过滑杆908的联动拉动齿条912复位,解除齿条912与限位齿轮913之间的啮合,重新恢复移动座802的移动。
56.最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。