1.本实用新型涉及转速测量的技术领域,更具体的说是涉及一种转速测量仪校准系统。
背景技术:
2.发动机转速可以反应出机动车的工作状态、功率输出、怠速稳定状态等情况,如不能准确检测机动车发动机的转速,就会导致交通事故发生,威胁人类的健康安全,故为确保检测发动机转速的转速测量仪在日常使用过程中的测量数值准确可靠,需定期对其进行计量校准,而目前已有的转速测量仪的校准装置存在以下一些问题:其一,校准工作的模式单一,无法适用多种模式;其二,转速测量仪的检测精度不高,且缺少反馈记录等功能。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的在于提供一种转速测量仪校准系统,该系统能够模拟发动机的不同工况,即能够检测转速测量仪在对应工况下精确的转速值,根据参考的转速值与实际检测的转速值进行自动校准。
4.为实现上述目的,本实用新型提供了如下技术方案:
5.一种转速测量仪校准系统,包括机壳,所述机壳内包括有工控机、校准装置、转速测量仪以及振动台,所述工控机分别与转速测量仪以及校准装置之间通过数据连接,所述校准装置分别与转速测量仪以及振动台之间通过数据连接,所述转速测量仪用于在振动台振动的状态下测量转速;
6.所述校准系统还包括校准数据库,所述校准数据库包括若干模拟信息,若干所述模拟信息反映发动机工况状态;
7.所述校准系统还包括校准模块;
8.所述校准模块,获取所述校准数据库中的模拟信息,通过所述工控机向所述振动台发送模拟信息以使振动台振动,获取所述校准装置中的参考转速信息,获取转速测量仪在振动台振动状态下至少一次的转速值作为第一实际转速信息,根据所述参考转速信息分别与多次的第一实际转速信息进行比较,若所述参考转速信息与第一实际转速信息相同,则向工控机发出继续检测信号,若所述参考转速信息与第一实际转速信息不符,则向转速测量仪发出校准信息以使转速测量仪自动进行校准。
9.进一步的,所述机壳内还设有视觉检测器,所述视觉检测器与工控机之间通过信号连接,所述视觉检测器位于转速测量仪上方,所述校准系统还包括图像处理模块,所述图像处理模块获取视觉检测器采集得到转速测量仪上显示屏的图像作为转速图像信息,根据所述转速图像信息分析得到第二实际转速信息,所述校准模块获取图像处理模块中的第二实际转速信息,根据所述参考转速信息与第二实际转速信息相同,则向工控机发出继续检测信号,若所述参考转速信息与第二实际转速信息不符,则向转速测量仪发出校准信息以使转速测量仪自动进行校准。
10.进一步的,所述校准数据库包括若干参考信息,若干参考信息包括型号信息和标准信息,所述型号信息反映不同的转速测量仪的型号,所述标准信息反映不同转速测量仪的参考转速值,所述型号信息和标准信息一一对应,所述校准系统还包括参数设置模块,若所述参数设置模块未获取到外界输入工控机中的预设转速值时,所述参数设置模块获取图像处理模块中的转速图像信息,根据转速图像信息在校准数据库中索引得到待测转速测量仪的型号信息,根据所述型号信息在校准数据库中索引得到待测转速测量仪的标准信息,所述参数设置模块将标准信息中的参考转速值传输至待测转速测量仪中。
11.进一步的,所述校准模块中包括校准子模块,所述校准子模块获取工控机中的模式选择信息,所述模式选择信息包括自定义模式信息和标准模式信息,若所述校准子模块获取到工控机中的自定义模式信息,则所述工控机接收外界输入的测量点数信息作为手动测量信息,且通过所述工控机向校准装置发送手动测量信息,若所述校准子模块获取到工控机中的标准模式信息,则所述工控机获取指定的测量点数信息作为自动测量信息,且通过所述工控机向校准装置发送自动测量信息。
12.进一步的,所述校准系统还包括记录模块,所述记录模块获取校准子模块中各个测量点数测量得到的第一实际转速信息进行记录,获取校准装置中各个测量点的参考转速信息进行记录。
13.进一步的,所述校准系统还包括绘制模块,所述绘制模块获取记录模块中的第一实际转速信息作为记录转速信息,获取所述记录模块中参考转速信息作为对比转速信息,根据所述记录转速信息和对比转速信息进行图表绘制。
14.进一步的,所述记录模块中包括记录子模块,所述记录子模块获取视觉检测器采集得到转速测量仪的图像作为整体图像信息,根据所述整体图像信息通过深度算法学习得到待测转速测量仪的型号在数据库中记录。
15.进一步的,所述图像处理模块中包括图像修订模块,所述图像修订模块获取图像处理模块中的转速图像信息,根据所述转速图像信息通过blob分析以及 7段数码管识别得到第二实际转速信息。
16.进一步的,所述视觉检测器四周均设有照明组件,所述照明组件包括照明灯,所述照明灯可转动的设置在机壳内顶面,所述照明灯用于照射待测的转速测量仪。
17.进一步的,所述照明组件还包括至少一个连接架,每个所述连接架均包括三角块、底板和两组竖板,所述底板水平连接在照明灯的顶部,两组所述竖板相对且竖直连接在底板的两端,所述三角块竖直连接在两组竖板之间,且所述三角块竖直设置,所述三角块的顶部连接角与机壳内顶面铰接,所述三角块的顶部连接角处还设有用于驱动照明灯转动的驱动电机。
18.进一步的,两组所述的竖板的背离面上分别设有弧形滑轨,同侧的竖板顶端设有滑动连接在同侧弧形滑轨内的滑动轮,所述弧形滑轨的圆心与三角块转动点重合。
19.本实用新型的有益效果:1、通过工控机将需要模拟的信息传输至振动台以使振动台模拟出发动机的状态,再通过工控机将参考转速值输入校准装置中,将转速测量仪在振动台振动状态下的实际转速值通过数据传输至工控机中,将实际转速值与参考转速值进行比较,根据比较的情况对转速测量仪进行自动调校,能够模拟拟发动机的多种不同工况,即能够方便快捷检测转速测量仪在对应工况下精确的转速值;
20.2、通过视觉检测器采集转速测量仪上显示屏显示的实际转速值,视觉采集器将采集的图像通过数据传输至工控机中,将实际转速值与参考转速值进行比较,根据比较的情况对转速测量仪进行自动调校,其目的是视觉检测器采集得到的实际转速值能够与转速测量仪直接传输至工控机的实际转速值进行对比校验,提高检测的精准度。
21.3、可以自主选择转速测量仪的校准模式进行自动化的计量校准工作,该系统结构简单实用、可靠性好,符合信息化、自动化要求,具有可扩充性,该系统解决了发动机转速测量仪传统手动校准过程中操作繁琐、耗时长等问题,减少了人为干预。
22.4、通过可调节照射角度的照明灯对视觉检测器进行辅助,视觉检测器可针对不同尺寸的屏幕进行采集图像,采集的图像更为清晰,有助于后续的数据分析。
附图说明
23.图1是本实用新型的控制关系图;
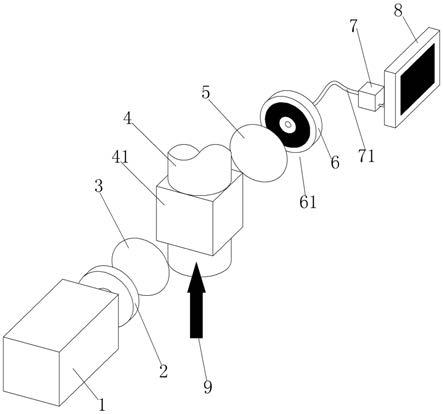
24.图2是本实用新型的结构图;
25.图3是本实用新型中校准流程图;
26.图4是本实用新型中修订的流程图;
27.图5是本实用新型中blob分析参数设置界面图;
28.图6是本实用新型中视觉检测过程与结果;
29.图7是本实用新型中照明组件的结构图;
30.图8是本实用新型中弧形滑轨处的结构图。
31.附图标记:1、机壳;2、工控机;3、校准装置;4、转速测量仪;5、振动台;6、视觉检测器;7、照明组件;71、照明灯;72、连接架;721、三角块; 722、底板;723、竖板;724、驱动电机;73、弧形滑轨;74、滑动轮;101、校准模块;102、图像处理模块;103、参数设置模块;104、校准子模块;105、记录模块;106、绘制模块;107、记录子模块;108、图像修订模块。
具体实施方式
32.下面结合附图和实施例,对本实用新型进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
33.由于目前已有的转速测量仪4的校准装置3存在以下一些问题:其一,校准工作的模式单一,无法适用多种模式;其二,转速测量仪4的检测精度不高,且缺少反馈记录等功能,因此本实用新型设计这种转速测量仪4校准系统,具体结构如图2所示,包括机壳1,机壳1内包括有工控机2、校准装置3、转速测量仪4以及振动台5(机壳1中设有垂直设置的阻隔板,机壳1内由阻隔板隔成的左右两个腔室,工控机2与校准装置3由上而下位于左腔室内,转速测量仪4和振动台5位于右腔室内,振动台5可以为校准装置3中的一部分),工控机2分别与转速测量仪4以及校准装置3之间通过数据连接(工控机2与转速测量仪4之间通过rs-232标准接口线连接,工控机2与校准装置3之间通过 usb线连接),校准装置3分别与转速测量仪4以及振动台5之间通过数据连接 (校准装置3与转速测量仪4通过无线信号连接,校准装置3与振动台5之间通过usb线连接),转速测量仪4的检测头连接在振动台5上,转速测量
仪4 用于在振动台5振动的状态下测量转速。
34.如图1所示,校准系统还包括校准数据库,校准数据库包括若干模拟信息,若干模拟信息反映发动机工况状态(其中模拟信息包括汽油发动机高压点火信号、汽车发动机的充电脉冲信号以及柴油发动机的高压喷油信号);
35.校准系统还包括校准模块101;
36.校准模块101,获取校准数据库中的模拟信息,通过工控机2向振动台5发送模拟信息以使振动台5振动(振动台5可模拟发动机不同转速工况下的振动波和声波),获取校准装置3中的参考转速信息,获取转速测量仪4在振动台5 振动状态下至少一次的转速值作为第一实际转速信息,根据参考转速信息分别与多次的第一实际转速信息进行比较,若参考转速信息与第一实际转速信息相同,则向工控机2发出继续检测信号,若参考转速信息与第一实际转速信息不符,则向转速测量仪4发出校准信息以使转速测量仪4自动进行校准。
37.本实用新型的优点在于:1、通过工控机2将需要模拟的信息传输至振动台 5以使振动台5模拟出发动机的状态,再通过工控机2将参考转速值输入校准装置3中,将转速测量仪4在振动台5振动状态下的实际转速值通过数据传输至工控机2中,将实际转速值与参考转速值进行比较,根据比较的情况对转速测量仪4进行自动调校,能够模拟拟发动机的多种不同工况,即能够方便快捷检测转速测量仪4在对应工况下精确的转速值;
38.2、实现对电压脉动式、低频振动式、发动机爆震式、汽油点火式、柴油喷油式五种类别转速测量仪4自动校准工作,且可选择转速测量仪4实时显示数值方式。
39.如图1-2所示,机壳1内还设有视觉检测器6(视觉检测器6由相机和镜头共同组成,相机优选为500万像素,内置x86开放平台的cmos工业智能相机,分辨率为2592
×
2048,最大采集帧率为30fps,内部平台支持视觉检测流程与软件,可利用软触发的方式采集获取数字图像),视觉检测器6与工控机2之间通过信号连接(通过千兆网线接口向工控机2传输数据),视觉检测器6位于转速测量仪4上方,校准系统还包括图像处理模块102,图像处理模块102获取视觉检测器6采集得到转速测量仪4上显示屏的图像作为转速图像信息,根据转速图像信息分析得到第二实际转速信息,校准模块101获取图像处理模块 102中的第二实际转速信息,根据参考转速信息与第二实际转速信息相同,则向工控机2发出继续检测信号,若参考转速信息与第二实际转速信息不符,则向转速测量仪4发出校准信息以使转速测量仪4自动进行校准;其有益的效果为:通过视觉检测器6采集转速测量仪4上显示屏显示的实际转速值,视觉采集器将采集的图像通过数据传输至工控机2中,将实际转速值与参考转速值进行比较,根据比较的情况对转速测量仪4进行自动调校,其目的是对不同规格的转速测量仪4转速数值准确识别,视觉检测器6采集得到的实际转速值能够与转速测量仪4直接传输至工控机2的实际转速值进行对比校验,提高检测的精准度。
40.校准数据库包括若干参考信息,若干参考信息包括型号信息和标准信息,型号信息反映不同的转速测量仪4的型号,标准信息反映不同转速测量仪4的参考转速值,型号信息和标准信息一一对应,校准系统还包括参数设置模块103,参数设置模块103可以手动将预设转速值通过工控机2输入,若参数设置模块 103未获取到外界输入工控机2中的预设转速值时,参数设置模块103获取图像处理模块102中的转速图像信息,根据转速图像信息在校准数据库中索引得到待测转速测量仪4的型号信息,根据型号信息在校准数据库中索引得到待测转速测量仪4的标准信息,参数设置模块103将标准信息中的参考转速值传输至待
测转速测量仪4中;如表1所示:
41.表1-参数对比
42.待测转速测量仪显示屏类型显示屏尺寸(长
×
宽)cmmqz-4液晶显示屏3.7
×
1.7mqz-5液晶显示屏3.6
×
1.6rpm5600液晶显示屏5.1
×
3.0
43.如表格所示,不同型号的待测转速测量仪4中的显示屏尺寸是不相同,因此不同型号的待测转速测量仪4在测量完成后会对其进行对应的数据记录。
44.如图3所示,校准模块101中包括校准子模块104,校准子模块104获取工控机2中的模式选择信息,模式选择信息包括自定义模式信息和标准模式信息 (自定义模式信息为手动通过工控机2输入需要测量的点数,标准模式为工控机2自动设定5个测量点数),若校准子模块104获取到工控机2中的自定义模式信息,则工控机2接收外界输入的测量点数信息作为手动测量信息,且通过工控机2向校准装置3发送手动测量信息,若校准子模块104获取到工控机2 中的标准模式信息,则工控机2获取指定的测量点数信息作为自动测量信息,且通过工控机2向校准装置3发送自动测量信息,校准原理:首先,在工控机2 中填写待测转速测量仪4的参考转速值以及振动台5的振动模式,选择工控机2 中的模式,若选择为自定义模式,则工人手动将测量点数输入工控机2中,若选择为标准模式,则工控机2中自动设定5个测量点数,其次,工控机2将信息传输至校准装置3中的振动台5,转速测量仪4检测到的实际转速值与校准装置3给予的参考转速值进行比较,或者视觉检测器6检测到转速测量仪4显示屏上的实际转速值与校准装置3给予的参考转速值进行比较,然后工控机2读取校准装置3中的对比信息,多个点按顺序进行检测,每个点可以选择是否都检测3次,将检测后的数据值进行记录和制定表格,若第二次检测与第一次检测相同,则结束,反之继续检测进行调校。
45.校准系统还包括记录模块105,记录模块105获取校准子模块104中各个测量点数测量得到的第一实际转速信息进行记录,获取校准装置3中各个测量点的参考转速信息进行记录;校准系统还包括绘制模块106,绘制模块106获取记录模块105中的第一实际转速信息作为记录转速信息,获取记录模块105中参考转速信息作为对比转速信息,根据记录转速信息和对比转速信息进行图表绘制(用户可以在工控机2的管理界面查看所有的历史数据,并对其进行删改);由于校准数据库中的型号信息是固定的,当校准系统进行校准的待测转速测量器的型号未在校准数据库中备案记录,因此本实用新型中的记录模块105包括记录子模块107,记录子模块107获取视觉检测器6采集得到转速测量仪4的图像作为整体图像信息,根据整体图像信息通过深度算法学习得到待测转速测量仪4的型号在数据库中记录(深度算法学习是现有技术,其目的就是通过整体图像信息进行细化识别面板上的型号或者图案进行备案)。
46.如图4所示,图像处理模块102中包括图像修订模块108,图像修订模块 108获取图像处理模块102中的转速图像信息,根据转速图像信息通过blob分析以及7段数码管识别得到第二实际转速信息(其中blob分析以及7段数码管识别是现有技术),修订原理:首先将采集的转速图像信息进行blob分析、形态学处理以及特征匹配,然后进行模块匹配,若匹配未成功,重新进行blob分析,若匹配成功,则进行图像几何变换,再进行位置修正、7段数码管
识别以及与脚本编码匹配,若匹配未成功,则重新进行blob分析,若匹配成功,则输出结果,具体的首先进行图像采集,再根据设定好的面积形状对被检仪表显示屏区域进行提取和标记,具体参数设置如图5所示,其中选取单阈值分割方式分离前景和背景,“亮于背景”极性参数可使数字字符呈白色,背景信息呈黑色。提取成功后对其运用形态学处理调整优化数字效果,必要时还需进行图像滤波去除干扰,然后运用特征模板匹配将识别区域进行动态定位,此步的目的是确保显示屏始终在可识别区域内,确定好所需识别显示屏区域位置后提取其长宽度信息,结合之前blob分析所得显示屏区域中心点坐标,最后经过计算偏移即可分别得到四位数字的中心点位置,之后就进入7段数码管识别流程,字识别是根据7段数码管点亮状态判断得到相应编码来实现,所得编码与脚本中预写入的编码数列对比就可得出四个所显示的数字值,最后将结果传输到上位机,视觉检测的结果如图6所示,由于不同规格的被检表显示屏参数不同,将采取不同的方案进行检测识别。
47.如图7所示,视觉检测器6四周均设有照明组件7,照明组件7包括照明灯 71,照明灯71可转动的设置在机壳1内顶面,照明灯71用于照射待测的转速测量仪4;照明组件7还包括至少一个连接架72,每个连接架72均包括三角块 721、底板722和两组竖板723,底板722水平连接在照明灯71的顶部,两组竖板723相对且竖直连接在底板722的两端,三角块721竖直连接在两组竖板723 之间,且三角块721竖直设置,三角块721的顶部连接角与机壳1内顶面铰接,三角块721的顶部连接角处还设有用于驱动照明灯71转动的驱动电机724;灯光调整原理:当待测转速测量仪4上的光照度需要进行调整,则驱动电机724 驱动三角块721转动,三角块721转动后带动连接架72转动,连接架72底部的照明灯71转动;如图8所示,两组竖板723的背离面上分别设有弧形滑轨73,同侧的竖板723顶端设有滑动连接在同侧弧形滑轨73内的滑动轮74,弧形滑轨 73的圆心与三角块721转动点重合,弧形滑轨73的目的是起到一个限位辅助的作用,本实用新型中三角块721的转动角度在
±
10
°
之间,其有益的效果为通过可调节照射角度的照明灯71对视觉检测器6进行辅助,视觉检测器6可针对不同尺寸的屏幕进行采集图像,采集的图像更为清晰,有助于后续的数据分析。
48.测试例:三种规格型号转速测量仪4数量各30个,在转速500~6000rpm内选取五个校准点进行测试。
49.由于不同规格的被检表显示屏尺寸,特征点匹配等参数不同,也会采取不同的方案进行检测识别,现采取三种方案分别用来检测三种不同型号规格的转速测量仪4数值,各方案主要在blob分析的面积使能、阈值分割阈值;特征模板匹配等参数有所区别,结果中的耗时时间包括软件内部各工具调用和视觉算法时间和,不同型号被检仪表显示屏等参数的不同将会导致方案耗时时间的差异,测试具体结果如表2所示:
50.表2-视觉识别结果
[0051][0052]
识别异常具体有几种情况:显示屏特征匹配区域被仪器其他连线所遮挡,导致显示屏区域匹配不准确;相较于其他型号规格的被检表,rpm5600显示屏周围有大量黑色区域,blob分析的效果相对来说不是特别理想,会对后续数码管识别造成干扰。
[0053]
此外还采取与传统手动校准方法过程进行对比测试,结果如表3所示,其中耗时计算的时间包括从开始对转速测量仪4检测直至生成原始记录总时间。
[0054]
表3-两种检测结果时间对比
[0055]
待测转速测量仪手动校准平均耗时/min自动校准平均耗时/minmqz-412.453.57mqz-516.234.62rpm560018.476.19
[0056]
从整体校准操作时间上与传统的手动校准时间来看,手动校准的时间大致在每台15min,而自动校准系统的整体运行时间在4min-5min左右,校准时间缩短了约70%,大大提高了校准效率。
[0057]
以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。