1.本实用新型涉及智能机器人技术领域,具体涉及一种具有风道自清洁功能的机器人。
背景技术:
2.扫地机器人是智能家用电器的一种,能凭借一定的人工智能 ,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘 、擦地工作的机器人 ,也统一归为扫地机器人。扫地机器人在使用久了之后,扫地机器人的吸尘风道的内壁就会堆积灰尘和头发等垃圾,如果要清理,就需要将机器人吸尘风道的吸尘口处的滚刷拆除,才能对吸尘风道的内壁进行清洁,清洁过程较为复杂,需要人为操作,浪费人力。
技术实现要素:
3.为解决上述问题,本实用新型公开一种具有风道自清洁功能的机器人,本申请的机器人可以在吸尘风道堆积较多的垃圾时,对吸尘风道进行自清洁,降低了用户的拆卸清洁频率,减少了工作量,提高用户体验度,防止细菌滋生。具体技术方案如下:
4.一种具有风道清洁功能的机器人,包括主体,所述主体中包括控制模块、吸尘风道、尘盒、风机、驱动机构和清洁刷,所述控制模块用于控制机器人,所述吸尘风道、尘盒和风机用于为机器人提供吸尘清洁功能,所述清洁刷设置在吸尘风道的内壁上,所述驱动机构用于为清洁刷在吸尘风道中移动提供动力,使所述清洁刷在移动过程中对吸尘风道的内壁进行清洁。与现有的技术相比,本申请的技术方案中的机器人可以在吸尘风道堆积较多的垃圾时,对吸尘风道进行自清洁,降低了用户的拆卸清洁频率,减少了工作量,提高用户体验度,防止细菌滋生;清洁刷通过左右移动的方式来对吸尘风道的内壁进行清洁,清洁效率高。
5.进一步地,所述清洁刷为条状清洁刷,该条状清洁刷的顶部设有刷毛,所述条状清洁刷与吸尘风道上半部内壁紧贴设置,且一端与驱动机构相连。
6.进一步地,所述吸尘风道上设有导槽,所述条状清洁刷的另一端与导槽可活动地相连。通过导槽将清洁刷的另一端固定,防止清洁刷工作较长的时间后,发生形变,无法与吸尘内壁贴合。
7.进一步地,所述驱动机构设置在吸尘风道的外部,该驱动机构包括转动电机、蜗杆和涡轮,所述转动电机与蜗杆的一端转动相连,所述涡轮与清洁刷的一端固定相连,所述蜗杆和涡轮相互啮合,来使转动电机转动时,带动清洁刷左右移动。驱动机构设置在吸尘风道的外部,防止吸尘风道吸进的灰尘对驱动机构造成影响。
8.进一步地,所述驱动机构设置在吸尘风道的外部,该驱动机构包括转动电机、齿条和齿轮,所述转动电机与清洁刷的一端固定连接,所述齿轮与转动电机转动相连,所述齿条固定在所述主体上且与齿轮啮合。驱动机构设置在吸尘风道的外部,防止驱动机构对吸尘
风道进行占用,降低清洁效率。
9.进一步地,所述吸尘风道的吸尘口处设有滚刷。
10.进一步地,所述吸尘风道中设有红外检测器,该红外检测器用于检测吸尘风道的内壁的垃圾堆积情况。可以根据吸尘风道的垃圾堆积情况来对吸尘风道进行清洁,灵活性高。
附图说明
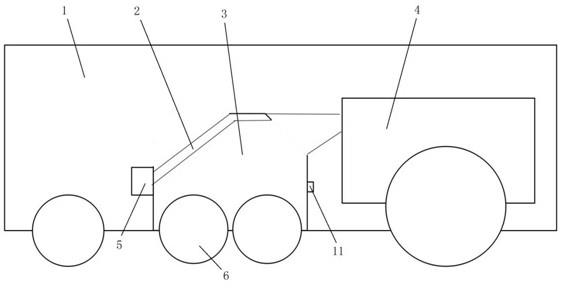
11.图1为本实用新型一种实施例中所述的具有风道自清洁功能的机器人的结构示意图;
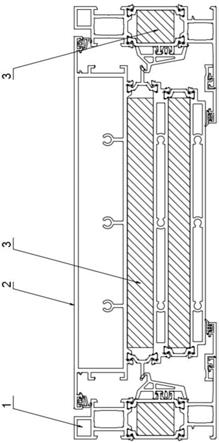
12.图2为本实用新型一种实施例中所述的具有风道自清洁功能的机器人的底部结构示意图。
具体实施方式
13.为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行描述和说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本申请。基于本申请提供的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
14.参照图1和图2可知,一种具有风道清洁功能的机器人,包括主体1,所述主体1中包括控制模块、吸尘风道3、尘盒4、风机7、驱动机构5和清洁刷2,所述控制模块用于控制机器人,所述控制模块具备目前常规扫地机器人的基本功能,包括运动控制,地图构建,多种导航方式等,并且具备向其他单元下达指令了功能,而所述主体1中具有相应的模块,来实现上述所说功能。所述吸尘风道3、尘盒4和风机7用于为机器人提供吸尘清洁功能,所述清洁刷2设置在吸尘风道3的内壁上,所述驱动机构5用于为清洁刷2在吸尘风道3中移动提供动力,使所述清洁刷2在移动过程中对吸尘风道3的内壁进行清洁。与现有的技术相比,本申请的技术方案中的机器人可以在吸尘风道3堆积较多的垃圾时,对吸尘风道3进行自清洁,降低了用户的拆卸清洁频率,减少了工作量,提高用户体验度,防止细菌滋生;清洁刷2通过左右移动的方式来对吸尘风道3的内壁进行清洁,清洁效率高。
15.作为其中一种实施例,所述清洁刷2为条状清洁刷,该条状清洁刷的顶部设有刷毛,所述条状清洁刷与吸尘风道3上半部内壁紧贴设置,且一端与驱动机构5相连。条状清洁刷的弯折度根据吸尘风道3的内壁的具体形状来进行设置,而且清洁刷2在不工作时,会放置在吸尘风道3的左右两侧中的一侧,且与顶部内壁贴合,不影响机器人的吸尘功能。所述吸尘风道3上设有导槽12,所述条状清洁刷2的另一端与导槽12可活动地相连。通过导槽12将清洁刷2的另一端固定,防止清洁刷2工作较长的时间后,发生形变,无法与吸尘内壁贴合。
16.作为其中一种实施例,所述驱动机构5设置在吸尘风道3的外部,该驱动机构5包括转动电机8、蜗杆9和涡轮10,所述转动电机8与蜗杆9的一端转动相连,所述涡轮10与清洁刷2的一端固定相连,所述蜗杆9和涡轮10相互啮合,来使转动电机8转动时,带动清洁刷2左右移动。驱动机构5设置在吸尘风道3的外部,防止吸尘风道3吸进的灰尘对驱动机构5造成影响。
17.作为其中一种实施例,所述驱动机构5设置在吸尘风道3的外部,该驱动机构5包括转动电机、齿条和齿轮,所述转动电机与清洁刷2的一端固定连接,所述齿轮与转动电机转动相连,所述齿条固定在所述主体1上且与齿轮啮合。驱动机构5设置在吸尘风道3的外部,防止驱动机构5对吸尘风道3进行占用,降低清洁效率。
18.作为其中一种实施例,所述吸尘风道3的吸尘口处设有滚刷6。所述吸尘风道3中设有红外检测器11,该红外检测器11用于检测吸尘风道3的内壁的垃圾堆积情况。可以根据吸尘风道3的垃圾堆积情况来对吸尘风道3进行清洁,灵活性高。
19.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
20.以上各实施例仅表达了本实用新型的几种实施例,其描述较为具体和详细,但并不能因此而理解为实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。
技术特征:
1.一种具有风道自清洁功能的机器人,包括主体,其特征在于,所述主体中包括控制模块、吸尘风道、尘盒、风机、驱动机构和清洁刷,所述控制模块用于控制机器人,所述吸尘风道、尘盒和风机用于为机器人提供吸尘清洁功能,所述清洁刷设置在吸尘风道的内壁上,所述驱动机构用于为清洁刷在吸尘风道中移动提供动力,使所述清洁刷在移动过程中对吸尘风道的内壁进行清洁。2.根据权利要求1所述的具有风道自清洁功能的机器人,其特征在于,所述清洁刷为条状清洁刷,该条状清洁刷的顶部设有刷毛,所述条状清洁刷与吸尘风道上半部内壁紧贴设置,且一端与驱动机构相连。3.根据权利要求2所述的具有风道自清洁功能的机器人,其特征在于,所述吸尘风道上设有导槽,所述条状清洁刷的另一端与导槽可活动地相连。4.根据权利要求1或2所述的具有风道自清洁功能的机器人,其特征在于,所述驱动机构设置在吸尘风道的外部,该驱动机构包括转动电机、蜗杆和涡轮,所述转动电机与蜗杆的一端转动相连,所述涡轮与清洁刷的一端固定相连,所述蜗杆和涡轮相互啮合,来使转动电机转动时,带动清洁刷左右移动。5.根据权利要求1或2所述的具有风道自清洁功能的机器人,其特征在于,所述驱动机构设置在吸尘风道的外部,该驱动机构包括转动电机、齿条和齿轮,所述转动电机与清洁刷的一端固定连接,所述齿轮与转动电机转动相连,所述齿条固定在所述主体上且与齿轮啮合。6.根据权利要求1所述的具有风道自清洁功能的机器人,其特征在于,所述吸尘风道的吸尘口处设有滚刷。7.根据权利要求1所述的具有风道自清洁功能的机器人,其特征在于,所述吸尘风道中设有红外检测器,该红外检测器用于检测吸尘风道的内壁的垃圾堆积情况。
技术总结
本实用新型公开一种具有风道清洁功能的机器人,包括主体,所述主体中包括控制模块、吸尘风道、尘盒、风机、驱动机构和清洁刷,所述控制模块用于控制机器人,所述吸尘风道、尘盒和风机用于为机器人提供吸尘清洁功能,所述清洁刷设置在吸尘风道的内壁上,所述驱动机构用于为清洁刷在吸尘风道中移动提供动力,使所述清洁刷在移动过程中对吸尘风道的内壁进行清洁。与现有的技术相比,本申请的技术方案中的机器人可以在吸尘风道堆积较多的垃圾时,对吸尘风道进行自清洁,降低了用户的拆卸清洁频率,减少了工作量,提高用户体验度,防止细菌滋生。防止细菌滋生。防止细菌滋生。
技术研发人员:肖刚军 徐广贤 黄泰明
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:2021.08.06
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。