1.本发明涉及养殖饲喂装置以及饲喂方法,具体涉及一种保育猪智能粥料机以及饲喂方法。
背景技术:
2.在保育猪的饲喂中,断奶应激大、死淘率高、饲喂干料腹泻率高等,一直都是保育猪养殖过程中影响保育猪生长的问题。研究表明保育猪断奶后饲喂粥料,尤其是带有香甜味和适当腥味并且与母猪物理状态较为相似的粥料,可帮助保育猪较好的从母乳饲喂过渡到饲料饲喂。饲喂粥料,能显著减少仔猪断奶应激,具有提高采食量、提高饲料转化率、减少各种疾病发生、显著提高生长性能等优点。
3.在现有的生猪规模化养殖中,保育猪断奶后的饲喂工作,基本上是靠人工调配粥料,逐步过渡到干料饲喂,耗费大量的人力物力,一定程度上增加了养殖成本;部分猪场甚至直接过渡到干料饲喂,导致保育猪腹泻率、病猪率及饲料浪费率增加。
技术实现要素:
4.本发明的目的在于克服上述存在的问题,提供一种保育猪智能粥料机,该保育猪智能粥料机能够自动提供粥料进行饲喂,无需人工参与,降低养殖成本。
5.本发明的另一个目的在于提供一种保育猪智能粥料饲喂方法。
6.本发明的目的通过以下技术方案实现:
7.一种保育猪智能粥料机,包括自动下料机构、自动供水机构、盛料机构以及料量检测机构;所述自动下料机构包括储料仓、螺旋输送杆和旋转驱动机构,所述螺旋输送杆设置在储料仓的内腔中,该螺旋输送杆与旋转驱动机构的输出端连接;所述储料仓的底部设有下料口,所述螺旋输送杆上设有延伸至下料口中的螺旋下料部;所述自动供水机构包括供水管和供水喷头,所述供水管连通在水源和供水喷头之间;所述盛料机构包括食槽,该食槽设置在储料仓的下料口的下方;
8.所述料量检测机构包括探针、搭铁线和探针线,所述探针设置在食槽之上;所述搭铁线的两端分别与控制器和食槽连接,所述探针线的两端分别与控制器和探针连接。
9.上述保育猪智能粥料机的工作原理为:
10.工作时,工作人员往储料仓中投放饲料,在旋转驱动机构的驱动下,螺旋输送杆进行旋转运动,由于螺旋输送杆的螺旋下料部延伸至下料口中,随着螺旋输送杆的旋转,螺旋下料部将储料仓中的饲料往下推送,使得饲料穿过下料口掉落至下方的食槽中。然后,通过供水管将水输送至供水喷头,再由供水喷头喷入食槽中,食槽内的饲料在水的浸泡作用下形成粥料,从而完成自动饲喂工作。
11.其中,在供水供料持续工作下,食槽内的水的液面逐渐增加,当液面接触到食槽的探针底部时,搭铁线和探针线形成电路导通,将闭合信号通过控制电路传输至控制器,控制器根据闭合信号,判断此时为食槽为料满状态,向自动下料机构和自动供水机构发送停止
工作指令。
12.本发明的一个优选方案,其中,所述食槽上设有锥形凸起的散料部,该散料部位于下料口的正下方。通过设置锥形结构的散料部,当饲料从下料口掉落后,可以沿着锥形面四周散开,均匀的分布在食槽的底部。
13.进一步,所述供水喷头设置在散料部的正上方,该供水喷头上设有多个圆周方向分布的出水孔;所述供水管从食槽的下方往上穿过散料部与供水喷头连接。通过上述结构,将供水喷头集成在凸起的散料部上,不仅可以为均匀为食槽喷水,而且还可以在水压的作用下圆周均匀喷出,可清洗粘附在食槽上的残留,实现自清洗的功能。
14.进一步,所述供水喷头包括锥形的封盖体和出水筒,所述出水筒的侧壁设有多个所述出水孔,沿着径向往外,所述出水孔往下倾斜设置;所述出水孔与出水筒的内腔连通;
15.所述封盖体上设有安装槽,所述出水筒的顶部安装在安装槽中;所述安装槽的槽壁往外倾斜,该槽壁的底部边缘低于出水孔的底部边缘。通过上述结构,水沿多个圆周分布的出水孔喷出后,打在伞状的槽壁上,形成连续伞状的水帘,继而对食槽的散料部的锥形面进行冲洗,可清洗锥形面上粘附的饲料。
16.进一步,所述出水孔与竖直方向之间的夹角为55
°
。
17.本发明的一个优选方案,其中,所述供水管包括主管道和分管道,所述主管道与水源连接;
18.所述分管道设有多个,分别连接在主管道上;一部分分管道与供水喷头连接,另一部分分管道与水嘴连接;其中,与供水喷头连接的分管道上设有过滤器、电磁阀和流量计;所述电磁阀和流量计均与控制器连接。通过上述结构,由主管道进行供水,通过过滤器过滤,可过滤掉水中大部分的杂质,避免杂质进入水路工作部件中,导致部件损坏,过滤器后接流量计,控制器根据流量计数据统计供水量和判断供水状态,来选择其工作模式,根据供水量判断是否改变电磁阀的开启状态。
19.本发明的一个优选方案,其中,所述螺旋输送杆上设有位于螺旋下料部的上方的搅料件,该搅料件上设有平行地贴着储料仓的内壁往上延伸的上搅拌部和平行地贴着储料仓的内壁往下延伸的下搅拌部。这样,在旋转驱动机构的驱动下,搅料件进行旋转,上搅拌部可扰动储料仓内上方的饲料,避免饲料粘附在储料仓避免形成料拱,下搅拌部可将螺旋下料部附近的饲料刮落,避免饲料粘附在进料喇叭口附近的斜面上。
20.本发明的一个优选方案,其中,所述旋转驱动机构包括旋转驱动电机,该旋转驱动电机固定设置在固定于机架的横梁上,该旋转驱动电机的输出轴通过联轴器与螺旋输送杆连接。通过上述结构,在旋转驱动电机的驱动下,根据内部饲喂方案程序,到达饲喂时间时,向旋转驱动电机发送工作指令,旋转驱动电机通过联轴器带动螺旋输送杆运转,从而将储料仓中的饲料推下至食槽中。
21.一种保育猪智能粥料饲喂方法,包括以下步骤:
22.设定单次喂料量、喂料时间以及水料比例;
23.到达喂料时间后,检测供水是否正常;
24.若供水正常时,向旋转驱动机构发送下料信号,旋转驱动机构驱动螺旋输送杆进行旋转,将储料仓中的饲料推下至食槽中,饲料与食槽中的水混合、浸泡,形成粥料;
25.在下料过程中,计算本次下料量和饲喂时长;若本次下料量达到设定值或饲喂时
长达到设定值时,旋转驱动机构停止驱动螺旋输送杆;若本次下料量和饲喂时长均未达到设定值时,继续下料;
26.若供水异常时,向旋转驱动机构发送下料信号,旋转驱动机构驱动螺旋输送杆进行旋转,将储料仓中的饲料推下至食槽中;自动供水机构向食槽中供水,水与饲料混合、浸泡,形成粥料;
27.在下料过程中,计算本次下料量和饲喂时长;若本次下料量达到设定值或饲喂时长达到设定值时,旋转驱动机构停止驱动螺旋输送杆,自动供水机构停止供水;
28.若本次下料量和饲喂时长均未达到设定值时,通过料量检测机构检测食槽中的料量;若料量达到设定值时,旋转驱动机构停止驱动螺旋输送杆;若料量未达到设定值时,继续下料;根据水料比计算下水量,若下水量达到设定值时,自动供水机构停止供水;若下水量未达到设定值时,继续供水。
29.本发明的一个优选方案,其中,当旋转驱动机构和自动供水机构停止工作时,进入空槽时段,给猪只预留清槽的时间,将食槽净槽;避免食槽内剩余料较多,导致食槽内粥料酸败。
30.本发明与现有技术相比具有以下有益效果:
31.1、本发明中的保育猪智能粥料机能够自动提供粥料进行饲喂,无需人工参与,降低养殖成本。
32.2、在旋转驱动机构的驱动下,螺旋输送杆进行旋转运动,由于螺旋输送杆的螺旋下料部延伸至下料口中,随着螺旋输送杆的旋转,螺旋下料部将储料仓中的饲料往下推送,使得饲料穿过下料口掉落至下方的食槽中。然后,通过供水管将水输送至供水喷头,再由供水喷头喷入食槽中,食槽内的饲料在水的浸泡作用下形成粥料,从而完成自动饲喂工作。
附图说明
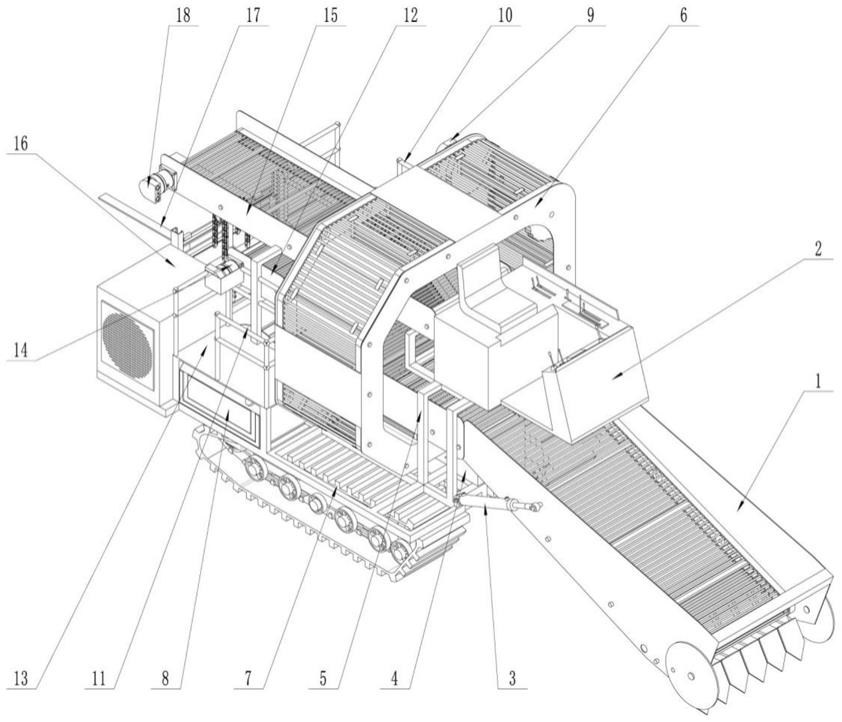
33.图1为本发明中的保育猪智能粥料机的立体结构示意图。
34.图2为本发明中的保育猪智能粥料机的剖视图。
35.图3为本发明中的自动供水机构的结构简图。
36.图4为本发明中的料量检测机构和食槽的结构简图。
37.图5为本发明中的供水喷头的剖视图。
38.图6为本发明中的保育猪智能粥料饲喂方法的工作流程图。
具体实施方式
39.为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
40.参见图1-2,本实施例中的保育猪智能粥料机,包括自动下料机构、自动供水机构、盛料机构以及料量检测机构;所述自动下料机构包括储料仓1、螺旋输送杆2和旋转驱动机构,所述螺旋输送杆2设置在储料仓1的内腔中,该螺旋输送杆2与旋转驱动机构的输出端连接;所述储料仓1的底部设有下料口1-1,所述螺旋输送杆2上设有延伸至下料口1-1中的螺旋下料部2-1。其中,所述螺旋输送杆2的参数为:左旋、外径40mm、螺距25mm、螺旋叶片厚度为2mm、内径为12mm、长度为100mm。
41.参见图1-2,所述螺旋输送杆2上设有位于螺旋下料部2-1的上方的搅料件3,该搅料件3上设有平行地贴着储料仓1的内壁往上延伸的上搅拌部和平行地贴着储料仓1的内壁往下延伸的下搅拌部。具体地,所述上搅拌部的折弯角度为114
°
,长度为100mm,下搅拌部的折弯角度为65
°
,长度为70mm。这样,在旋转驱动机构的驱动下,搅料件3进行旋转,上搅拌部可扰动储料仓1内上方的饲料,避免饲料粘附在储料仓1避免形成料拱,下搅拌部可将螺旋下料部2-1附近的饲料刮落,避免饲料粘附在进料喇叭口附近的斜面上。
42.参见图1-2,所述旋转驱动机构包括旋转驱动电机4,所述旋转驱动电机4与控制器5电连接,该控制器5由外部接线供电,通过内部控制电路连接旋转驱动电机4。所述旋转驱动电机4固定设置在固定于机架6的横梁上,该旋转驱动电机4的输出轴通过联轴器7与螺旋输送杆2连接。在电机保护罩8的作用下,可避免饲料或者其他杂质进入电机工作部件,销钉将旋转驱动电机4的输出轴和联轴器7连接,锁紧橡胶圈将销钉固定在联轴器7的销钉孔内,避免销钉滑出,导致工作失效。
43.通过上述结构,在旋转驱动电机4的驱动下,根据内部饲喂方案程序,到达饲喂时间时,向旋转驱动电机4发送工作指令,旋转驱动电机4通过联轴器7带动螺旋输送杆2运转,从而将储料仓1中的饲料推下至食槽11中。
44.参见图1-2,所述自动供水机构包括供水管9和供水喷头10,所述供水管9连通在水源和供水喷头10之间;所述盛料机构包括食槽11,该食槽11设置在储料仓1的下料口1-1的下方。
45.参见图2-3,所述供水管9包括主管道和分管道,所述主管道与水源连接;所述分管道设有多个,分别连接在主管道上;一部分分管道与供水喷头10连接,另一部分分管道与水嘴12连接;其中,与供水喷头10连接的分管道上设有过滤器13、电磁阀14和流量计15;所述电磁阀14和流量计15均与控制器5连接;所述分管道上均设有手动阀门16。通过上述结构,由主管道进行供水,通过过滤器13过滤,可过滤掉水中大部分的杂质,避免杂质进入水路工作部件中,导致部件损坏,过滤器13后接流量计15,控制器5根据流量计15数据统计供水量和判断供水状态,来选择其工作模式,根据供水量判断是否改变电磁阀14的开启状态。
46.其中,供水管9裸露在机架6外侧的部分,通过套接不锈钢波纹管实现保护效果。其中,供水管9为透明pu管,管接头均为快插pu管接头,提高设备的拆卸的维修效率。
47.参见图2-3,所述食槽11上设有凸起的散料部11-1,该散料部11-1为锥形结构,且位于下料口1-1的正下方。通过设置锥形结构的散料部11-1,当饲料从下料口1-1掉落后,可以沿着锥形面四周散开,均匀的分布在食槽11的底部。
48.进一步,所述食槽11中间有锥形凸起结构,沿食槽11外缘焊接有隔档,将食槽11均分为六部分。
49.参见图2-5,所述供水喷头10设置在散料部11-1的正上方,该供水喷头10上设有多个圆周方向分布的出水孔10-2-1;所述供水管9从食槽11的下方往上穿过散料部11-1与供水喷头10连接。通过上述结构,将供水喷头10集成在凸起的散料部11-1上,不仅可以为均匀为食槽11喷水,而且还可以在水压的作用下圆周均匀喷出,可清洗粘附在食槽11上的残留,实现自清洗的功能。
50.进一步,所述供水喷头10包括锥形的封盖体10-1和出水筒10-2,所述出水筒10-2的侧壁设有多个所述出水孔10-2-1,沿着径向往外,所述出水孔10-2-1往下倾斜设置,所述
出水孔10-2-1与竖直方向之间的夹角为55
°
;所述出水孔10-2-1与出水筒10-2的内腔连通;所述封盖体10-1上设有安装槽,所述出水筒10-2的顶部安装在安装槽中;所述安装槽的槽壁往外倾斜,该槽壁的底部边缘低于出水孔10-2-1的底部边缘。通过上述结构,水沿多个圆周分布的出水孔10-2-1喷出后,打在伞状的槽壁上,形成连续伞状的水帘,继而对食槽11的散料部11-1的锥形面进行冲洗,可清洗锥形面上粘附的饲料。
51.参见图2-5,所述料量检测机构包括探针17、搭铁线18和探针线19,所述探针17设置在食槽11之上;所述搭铁线18的两端分别与控制器5和食槽11连接,所述探针线19的两端分别与控制器5和探针17连接。通过上述结构,在供水供料持续工作下,食槽11内的水的液面逐渐增加,当液面接触到食槽11的探针17底部时,搭铁线18和探针线19形成电路导通,将闭合信号通过控制电路传输至控制器5,控制器5根据闭合信号,判断此时为食槽11为料满状态,向自动下料机构和自动供水机构发送停止工作指令。
52.在复杂的猪场环境中,普通材料极易腐蚀,本实施例中,所涉及的机架6、输出轴、联轴器7、销钉、探针17均为耐腐蚀的不锈钢材料,以避免腐蚀,降低设备的使用寿命。
53.上述实施例中,电磁阀14和流量计15为一体结构,型号为wfs-e-np006s-4,0-30l/min,湛江鼎方电磁阀科技有限公司。
54.上述实施例中,所述食槽11液位监测装置,探针17依靠紧定螺钉压紧在尼龙衬套内,探针17距离食槽11底部距离可调,通过调整该距离,实现调整食槽11内存料量。
55.参见图1-5,上述保育猪智能粥料机的工作原理为:
56.工作时,工作人员往储料仓1中投放饲料,在旋转驱动机构的驱动下,螺旋输送杆2进行旋转运动,由于螺旋输送杆2的螺旋下料部2-1延伸至下料口1-1中,随着螺旋输送杆2的旋转,螺旋下料部2-1将储料仓1中的饲料往下推送,使得饲料穿过下料口1-1掉落至下方的食槽11中。然后,通过供水管9将水输送至供水喷头10,再由供水喷头10喷入食槽11中,食槽11内的饲料在水的浸泡作用下形成粥料,从而完成自动饲喂工作。
57.进一步,控制器5根据内部程序,统计旋转驱动电机4运行的时长,来计算已排出的料量,当料量达到本饲喂周期所设定料量时,停止下水下料,进入空槽时段,以方便猪只将食槽11内的余料采食完毕。如果未达到设定料量,但本周期工作时长已达到周期设定时长,仍会停止下水下料,进入空槽时段。
58.按控制器5内设定的水料比例及份量,分离式供水供料,实现水料均匀混合,混合比例精准;还可根据食槽11内余料,来实时调整供料,减少饲料浪费。
59.参见图6,本实施例中的保育猪智能粥料饲喂方法,包括以下步骤:
60.设定单次喂料量、喂料时间以及水料比例。
61.到达喂料时间后,检测供水是否正常。
62.若供水正常时,向旋转驱动机构发送下料信号,旋转驱动机构驱动螺旋输送杆2进行旋转,将储料仓1中的饲料推下至食槽11中,饲料与食槽11中的水混合、浸泡,形成粥料。
63.在下料过程中,计算本次下料量和饲喂时长;若本次下料量达到设定值或饲喂时长达到设定值时,旋转驱动机构停止驱动螺旋输送杆2;若本次下料量和饲喂时长均未达到设定值时,继续下料。
64.若供水异常时,向旋转驱动机构发送下料信号,旋转驱动机构驱动螺旋输送杆2进行旋转,将储料仓1中的饲料推下至食槽11中;自动供水机构向食槽11中供水,水与饲料混
合、浸泡,形成粥料。
65.在下料过程中,计算本次下料量和饲喂时长;若本次下料量达到设定值或饲喂时长达到设定值时,旋转驱动机构停止驱动螺旋输送杆2,自动供水机构停止供水。
66.若本次下料量和饲喂时长均未达到设定值时,通过料量检测机构检测食槽11中的料量;若料量达到设定值时,旋转驱动机构停止驱动螺旋输送杆2;若料量未达到设定值时,继续下料;根据水料比计算下水量,若下水量达到设定值时,自动供水机构停止供水;若下水量未达到设定值时,继续供水。
67.当旋转驱动机构和自动供水机构停止工作时,进入空槽时段,给猪只预留清槽的时间,将食槽11净槽;图6为避免食槽11内剩余料较多,导致食槽11内粥料酸败。
68.上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。