1.本发明涉及航天飞行器技术领域,尤其涉及一种航天飞行器辅助姿态解算方法。
背景技术:
2.当前航天领域飞行器的姿态解算基本依靠捷联惯导系统的惯性传感器采集3轴加速度和3轴角速度进行姿态解算,使用卫星导航技术作为参照,辅助修正捷联系统结算结果,进行组合导航运算。
3.然而gps每秒钟数据为1个,最高能够达到20个,并且存在丢帧的情况,无法保证参照数据的实时性。
4.尤其在一级飞行段,地面无线通信和电磁环境干扰对通信信号造成的影响,会使gps数据接收的质量造成影响,因此该阶段需要提供一种除gps外的辅助参考依据。
技术实现要素:
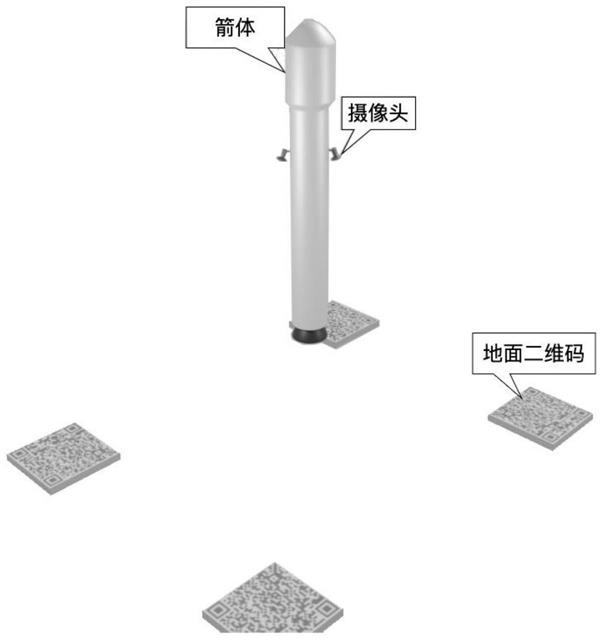
5.针对现有技术存在的问题,本发明提供一种航天飞行器辅助姿态解算方法,在发射场周边地面增设大面积的二维码标识,在飞行器上增加高清图像采集设备,使用定位估计方法,为传统的组合导航解算增加一个有利的辅助参考依据,增加计算精度,也可以在卫星导航丢星时直接参与组合导航计算。
6.为达到上述目的,本发明提供了一种航天飞行器辅助姿态解算方法,包括:在发射场周边多个二维码图形;在箭体上安装摄像头拍摄地面图像,视野范围至少能够覆盖3个二维码图形;每个二维码图形的二维码内容表征中心点的经纬度和高度;
7.基于所拍摄的二维码图形的世界坐标系位置以及在图像中的位置,解算二维码的实际点相对相机坐标系的旋转矩阵r和平移向量t,再经过和摄像机的逻辑中心与火箭箭体的中心的位置旋转矩阵rc及平移向量tc相乘,求解出火箭箭体的中心坐标和旋转角度;
8.当gps数据不存在时,采用求解出火箭箭体的中心坐标和旋转角度作为惯性导航提供辅助计算的参考值。
9.进一步地,二维码图形的画幅至少400米*400米,多个二维码之间至少间隔5km。
10.进一步地,所述箭体的两侧各设置一个摄像头,摄像头与所述箭体刚性连接,镜头可视角至少达到170度。
11.进一步地,所述摄像头每秒钟拍摄60帧,每秒钟计算60组火箭箭体的中心坐标和旋转角度;gps数据为每秒不超过20组;对gps丢码或不存在对应时刻数值时,采用求解出火箭箭体的中心坐标和旋转角度,作为惯性导航提供辅助计算的参考值。
12.进一步地,所述摄像头在飞行高度为50公里以下的一级飞行段进行拍摄,所述摄像头设置在一级火箭。
13.进一步地,旋转矩阵r和平移向量t通过下式求解:
[0014][0015]
其中u、v分别为二维码图形中心点在图片中的横、纵像素值,x、y、z分别为二维码图形在世界坐标系中的x、y、z方向的坐标值;dx、dy为感光芯片上像素;u0、v0表示的是图像的中心像素坐标和图像圆点像素坐标之间相差的横向和纵向像素数;f为摄像机的镜头焦距;rc和tc是摄像机的逻辑中心与火箭箭体的中心的位置旋转矩阵和平移向量。
[0016]
本发明的上述技术方案具有如下有益的技术效果:
[0017]
(1)本发明在发射场周边地面增设大面积的二维码标识,在飞行器上增加高清图像采集设备,使用定位估计方法,为传统的组合导航解算增加一个有利的辅助参考依据,增加计算精度,也可以在卫星导航丢星时直接参与组合导航计算。
[0018]
(2)本发明通过二维码定位,无需寻找标记点,计算速度快,解算的实时性更好。
[0019]
(3)本发明依据主流摄像设备60帧/秒的拍摄能力,理论上可以提供60组/秒的辅助参考数据;传统的gps数据最高只能够达到20组/秒,并且存在丢帧的情况。采用本发明的数据弥补gps数据的不足,能够实现每秒钟提供60次的辅助参考数据,保证姿态解算实时性精度更高。
附图说明
[0020]
图1是摄像设备成像示意图;
[0021]
图2二维码示意图;
[0022]
图3姿态解算流程图。
具体实施方式
[0023]
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0024]
如图1所示,需要在发射场周边合适的地面位置,设置多个大画幅的二维码,根据发射场周边情况至少设置4个二维码图形,成环状分布。每个二维码图形的二维码内容表征中心点的经纬度和高度。
[0025]
箭体上安装的摄像头镜头要求可视角至少达到170度,拍摄地面图像中至少能获取地面一个二维码,根据二维码的内容和图像在图片中的位置,整合两个镜头采集到的二维码信息,可以解算出摄像头在地理坐标系中的位置和方向。
[0026]
因为摄像头在箭体上为刚性连接,通过摄像头的位置和方向就能推算出当前箭体的姿态,从而为火箭的导航制导姿控提供辅助计算的参考值。
[0027]
一种航天飞行器辅助姿态解算方法,结合图3,包括:
[0028]
(1)在发射场周边多个二维码图形;在箭体上安装摄像头拍摄地面图像,视野范围至少能够覆盖3个二维码图形;每个二维码图形的二维码内容表征中心点的经纬度和高度。
[0029]
(2)基于所拍摄的二维码图形的世界坐标系位置以及在图像中的位置,解算二维
码的实际点相对相机坐标系的旋转矩阵r和平移向量t,再经过和摄像机的逻辑中心与火箭箭体的中心的位置旋转矩阵rc及平移向量tc相乘,求解出火箭箭体的中心坐标和旋转角度。
[0030]
旋转矩阵r和平移向量t通过下式求解:
[0031][0032]
公式中u、v分别为二维码图形中心点在图片中的横、纵像素值,x、y、z分别为二维码图形在世界坐标系中的x、y、z方向的坐标值;dx、dy单位为毫米/像素,dx,dy表示感光芯片上像素的实际大小,u0,v0表示的是图像的中心像素坐标和图像圆点像素坐标之间相差的横向和纵向像素数,f是摄像机的镜头焦距,这些值是摄像机出厂的标定值。
[0033]
rc是一个3*3的矩阵,tc是一个1*3的向量,物理含义是摄像机的逻辑中心(一般取镜头的焦点)与火箭的逻辑中心的位置旋转矩阵和平移向量,在火箭箭体结构设计及摄像头安装后,这些值就可以获取,是已知量。
[0034]
r是一个3*3的矩阵,t是一个1*3的向量,物理含义是二维码的实际点相对相机坐标系的旋转矩阵和平移向量,旋转矩阵由俯仰、偏航、滚转三个角度表示,平移向量和旋转矩阵的求解就是求解六个未知量。
[0035]
需要至少3个目标点和3个成像点之间的确切数值,根据上述公式(1)中的等式,能求解出火箭箭体的中心坐标和旋转角度。
[0036]
(3)当gps数据不存在时,采用求解出火箭箭体的中心坐标和旋转角度作为惯性导航提供辅助计算的参考值。
[0037]
在一个实施例中,首先在发射场的地面设置实体二维码,二维码采用版本40l的标准,码元尺寸为10米*10米(使得飞行器在亚轨道附近仍旧能识别二维码的内容),二维码的内容为本二维码图形占据的地面四个角落的地理坐标系的经度、纬度和高度,整个二维码图形的画幅至少400米*400米,多个二维码之间至少间隔5km,二维码铺设后与箭体的相对位置的效果如图1所示。二维码如图2所示。
[0038]
解析后得到的内容是“116.397127,39.916528,45,116.397128,39.916528,46,116.397127,39.916527,46,116.397128,39.916527,44”,分别是4个点经纬度和高度,二维码图片中的顶点顺序计算方法是把没有方块的角落放到右下角,分别标记左上、右上、左下、右下四个顶点的经纬高。四个点在世界坐标系(同地理坐标系)的坐标值分别记为:
[0039][0040]
通过摄像头采集到的该二维码的四个顶点在图片中的位置记为:
[0041][0042]
本发明的目标是通过上述八个向量,代入公式(1),计算出火箭箭体的位置和姿态,即箭体逻辑中心(比如质心)的地理系坐标和旋转矢量。
[0043]
综上所述,本发明涉及一种航天飞行器辅助姿态解算方法,在发射场周边多个二
维码图形;在箭体上安装摄像头拍摄地面图像,视野范围至少能够覆盖3个二维码图形;基于所拍摄的二维码图形的世界坐标系位置以及在图像中的位置,解算二维码的实际点相对相机坐标系的旋转矩阵和平移向量,进而求解出火箭箭体的中心坐标和旋转角度;当gps数据不存在时,采用求解出火箭箭体的中心坐标和旋转角度作为惯性导航提供辅助计算的参考值。本发明在发射场周边地面增设大面积的二维码标识,在飞行器上增加高清图像采集设备,使用定位估计方法,为传统的组合导航解算增加一个有利的辅助参考依据,增加计算精度,也可以在卫星导航丢星时直接参与组合导航计算。
[0044]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。