1.本发明涉及一种植株冠层体积计算方法,特别提供一种基于环形施药结构的变量喷雾植株冠层体积计算的方法。
背景技术:
2.智能施药决策时变量喷雾技术中的一个关键环节,合理的施药量时病虫害防治效果和环境效益的有机统一。随着国家对果品质量及环境安全的重视,越来越多的果园生产者认识到了变量施药的重要性。准确的树冠体积计算是决定各电磁阀流量大小输出的依据,更是实现果园变量喷雾功能的前提。常规的基于冠层体积的计算模型(trv)假设一行树由一个长方体冠层体积组成,将激光雷达的数据转换为笛卡尔坐标表示,根据树干与激光雷达的距离、相邻数据点的高度差和数据点到冠层外侧的距离进行面积计算,结合速度以及扫描时间进行体积计算,将离散化的长方体体积相加近似得到树冠单侧的体积。该种计算模型适用于常规仿形喷雾机,该类型喷雾机通常的施药结构垂直安装于喷雾机两侧以配合冠层模型计算冠层体积。目前市场上的环形施药结构喷雾机的喷雾输出覆盖范围以及角度和常规的两侧施药结构喷雾机不同,常规的基于冠层体积的计算模型(trv)并不能完全适配环形施药结构变量喷雾机的使用。针对这一问题,设计了一种基于环形施药结构的变量喷雾植株冠层体积计算方法。
技术实现要素:
3.为了提高变量喷雾机的通用性和紧凑性,针对于环形施药结构的特点以及结合激光雷达的扫描特性,提出了一种植株冠层体积计算方法。该方法无需极坐标转直角坐标步骤,能更快计算冠层体积大小,不仅适用于果园环境的检测,同时还适用于苗圃和葡萄园等多种环境的冠层体积计算。
4.本发明的技术方案如下:
5.基于二维激光雷达和速度传感器的环形施药结构喷雾机的冠层计算方法包括以下步骤:
6.步骤1:基于机器人操作系统(ros)采用垂直/水平安装方式的激光雷达实时获取果园的环境信息,水平扫描的激光雷达通过点云聚类检测树干的距离,采用速度传感器获取环形施药结构喷雾机的实时行进速度。步骤2:根据环形施药结构的特点和垂直扫描激光雷达的参数进行喷施区域划分,每个区域对应一个喷嘴的喷施范围。通过水平激光聚类得到树干的距离信息,结合融合扇区的角度范围、垂直扫描的激光雷达的安装位置和果树的高度上限设定阈值范围。步骤3:对处于阈值范围之内的有效激光点云进行计算,采用激光扫描周期方式进行果树冠层纵向分割,分别根据各喷施区域范围内的相邻点云对区域的扇区面积进行计算。步骤4:将连续n帧激光雷达数据作为一个喷雾单元,取这n帧数据的最大面积作为该喷雾单元的面积,结合速度传感器获得的速度信息和激光雷达的扫描周期可得
到果树冠层的体积大小。
7.进一步,所述步骤2具体包括:
8.垂直激光雷达与施药结构圆心安装在同一水平线上,避免不必要的矫正。根据环形施药结构上喷嘴在圆弧的接点相互间隔角度和所选用的二维激光雷达进行喷施区域划分,确定激光点和融合扇区的范围。根据水平扫描方向的激光雷达得到树干距离l,经坐标转换后可得到树干与垂直扫描激光雷达的距离d。通过垂直扫描激光雷得到果树的高度上限h,根据激光点的角度θ、距离ρ、树干距离d和果树高度上限h,可求得靶标有效区域对角线与z轴的夹角β和激光点到树干边界的距离:
[0009][0010]
β是为以激光雷达的z轴与所检测目标的高度上限之间的夹角。对激光点返回的数据点角度进行转换,将角度坐标系整体向逆时针方向旋转90
°
,转换至以激光雷达安装位置的水平向右为0
°
正方向。
[0011][0012]
式中r
ij
是第i扇区第j点激光雷达数据到树干边界的距离,α为角度坐标系转换之后每个激光点与z轴的夹角。
[0013][0014]
式中,ρ
ij
为激光雷达与检测物体的距离,θ为当前激光点所对应的角度值;θ
min
和θ
max
分别为融合扇区的最小角度值和最大角度值。当满足上面公式中的任意一条时,均视为在阈值范围之外的无效激光数据点,不对该激光点进行后续面积和体积等计算,直接进行过滤。
[0015]
进一步,所述步骤3具体包括:
[0016]
经步骤2求得垂直扫描激光雷达z轴与果树高度上限的夹角β和激光点到树干边界的距离r,根据设定阈值范围进行无效数据点过滤后,针对有效的激光雷达数据在线进行各区域的果树面积s的计算。其中,激光雷达的角度分辨率为θ,根据步骤2求得的第i扇区第j点激光数据到达树干边界的距离r
ij
和当前激光点的距离l
ij
和角度分辨率θ,可以分别推断当前激光点和下一个激光点在树干边界的扇区面积s1和在植株冠层外层的扇区面积s2,用s1减去s2即可以得到当前激光点所对应的扇区面积s,对融合扇区范围内的每个激光点面积进行累加,即可得到该扇区的面积si。
[0017][0018]
式中,si为第i扇区的面积,单位为m2;l
ij
为第i扇区第j点激光雷达数据到靶标外层距离;r
ij
为第i扇区第j点激光雷达数据到树干边界的距离;θ为激光雷达的角度分辨率。根据扇形面积计算公式可求出各喷施区域对应的靶标面积。
[0019]
进一步,所述步骤4具体包括:
[0020]
根据步骤3可在线计算植株冠层每帧激光数据所对应的各喷施区域的面积。为了匹配电磁阀的响应时间和提高靶标植株三维模型精度,采用累积法搭建靶标植株三维模型求体积:采取激光雷达连续扫描模式下的n帧数据作为一个喷雾单元。避免由于空隙而造成靶标漏检,取n帧数据中各喷施区域的最大面积作为该喷雾单元各喷施区域的面积。
[0021][0022]
式中,t
电磁阀
为电磁阀的响应时间,t
lidar
为激光雷达一帧数据的扫描时间,ceil()为向上取整函数。为了求取最大的扇区面积,需要对每次检测得到的面积进行临时存储于数组中,当检测生成n个面积数组后,对n个面积数组的每一个喷施区域面积分别进行比较,取每个喷施区域的面积最大值最为喷雾单元中该区域的面积。每个横向分割的最小单元完成的所需时间为激光雷达一帧数据的扫描时间t
lidar
,喷雾机的速度为v,将n个横向分割的最小单元作为一个喷雾单元,可以计算出每块单元的宽度w,进而可得到植株冠层喷雾单元扇格体积。
[0023]
w=n*t
lidar
*v
[0024]vi
=n*t
lidar
*v*si[0025]
式中,n为一个喷雾单元的激光雷达扫描的次数,t
lidar
为激光雷达一帧数据的扫描时间,v为变量喷雾机行驶的速度,si为一个喷雾单元内的各喷施区域的最大面积,vi为植株冠层喷雾单元扇格体积。对所有的扇格体积进行累加即可得到植株冠层的单侧体积。
[0026]
本发明的一种基于环形施药结构的变量喷雾控制系统,包括环形施药结构的变量喷雾单元、电源模块1、垂直方向扫描激光雷达2,水平方向扫描激光雷达3、嵌入式计算机4、速度传感器5、主控制器6;环形施药结构的变量喷雾单元中,变量喷雾作业前打开变量喷雾单元水箱开关9,药液从药箱8流过水箱开关9和过滤器10,通过机械泵11升压依次流向压力传感器15、半环形喷杆及其喷杆上排列设置的多个喷头16,喷杆的背面弯曲并将鼓风机17无接触包围;机械泵11和压力传感器15之间依次设有减压阀12、泄流开关13;变量喷雾控制系统经过信息采集和信息处理后,嵌入式计算机4根据计算得到的植株冠层体积大小分别计算出每个变量喷雾电磁阀7所需的占空比大小,主控制器6根据指令对变量喷雾电磁阀7进行驱动,使药液从变量喷雾电磁阀7流出,通过鼓风机17将雾滴吹响靶标,在使用时观察压力传感器15输出压力,调节减压阀12,直至输出期望水压,减压阀12输出的回流流向药箱8,使用射流搅拌器14使药液混合均匀;
[0027]
电源模块1给上层处理的设备进行供电,嵌入式计算机4通过机器人操作系统ros分别对垂直方向扫描激光雷达2,水平方向扫描激光雷达3和速度传感器5进行数据采集,信息采集后,嵌入式计算机4作为信息处理单元对这些数据分别进行处理;水平扫描激光雷达3的数据经嵌入式计算机4聚类处理后可以得到植株中心和水平扫描激光雷达3的距离,经坐标换算后得到垂直方向扫描激光雷达和植株中心的距离,嵌入式计算机4结合三个传感器的信息,根据基于环形施药结构的变量喷雾植株冠层体积计算方法流程处理之后,得到植株冠层的体积大小,进一步计算可以分别得到每个喷嘴对应输出的流量以及电磁阀的占空比大小,生成的指令通过串口发送至主控制器6,主控制器6根据指令独立控制变量喷雾电磁阀7,从而实现变量喷雾功能。
[0028]
进一步,垂直方向扫描激光雷达2和水平方向扫描激光雷达3采用的是欧镭激光的
lr-1bs2二维激光雷达;lr-1bs2激光雷达的有效工作角度范围是45
°
~315
°
,角度分辨率为0.225
°
,每个工作周期产生1200个有效距离数据点,范围是200~1400,当它的扫描频率为20hz时,其扫描周期为50ms,垂直方向扫描激光雷达安装在和鼓风机17处于同一水平线上,距离地面0.8米的位置,水平扫描激光雷达安装在垂直扫描激光雷达的正下方,距离地面0.6米,速度传感器5采用gps获取变量喷雾机的速度信息。
[0029]
本发明的有益效果为:
[0030]
1.针对环形施药结构的变量喷雾机发明的植株冠层体积计算方法,直接使用激光雷达的极坐标数据进行计算,能够更加快速的计算植株冠层的体积,同时适用于果园、苗圃和葡萄园等多种作业环境,提高喷雾机检测的通用性和准确性。
[0031]
2.采用水平/垂直扫描的激光雷达组合方式,提高机器人对作业环境的理解。水平扫描激光雷达可以动态、提前地检测到树干到激光雷达的距离,垂直激光雷达根据该距离可实现持续的匹配植株特征变化的冠层体积在线计算。
[0032]
3.采用喷施区域划分的方法独立计算每个喷嘴所对应的体积大小,结合环形施药结构和激光雷达扫描的特点对每个喷嘴所负责的区域计算计算,有利于后续计算各喷嘴的输出流量和电磁阀的占空比大小,为实现独立喷嘴的变量喷雾控制提供依据。
[0033]
4.采用累积法构建植株冠层三维模型,以n个最小分割单元作为一个喷雾单元,匹配电磁的响应时间和避免了由于冠层空隙而造成的漏检问题,提高了植株冠层体积计算的精度。
附图说明
[0034]
图1是基于环形施药结构的变量喷雾控制系统原理示意图;
[0035]
图2是基于环形施药结构的变量喷雾单元结构示意图;
[0036]
图3是基于环形施药结构的变量喷雾喷施区域划分示意图;
[0037]
图4是靶标植株冠层扇区面积计算示意图;
[0038]
图5是植株冠层体积测量原理示意图。
[0039]
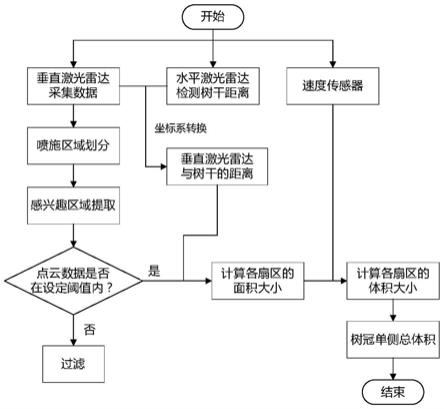
图6是基于环形施药结构的变量喷雾植株冠层体积计算方法流程图;
[0040]
图中,1-电源模块,2-垂直方向扫描激光雷达,3-水平方向扫描激光雷达,4-嵌入式计算机,5-速度传感器,6-主控制器,7-电磁阀,8-药箱,9-水箱开关,10-过滤器,11-机械泵,12-减压阀,13-泄流开关,14-射流搅拌器,15-压力传感器,16-喷头,17-鼓风机,18-喷施区域。
具体实施方式
[0041]
下面结合实施例及附图对本发明做进一步的描述,但本发明的实施方式不限于此。
[0042]
如图1所示,本示例采用的基于环形施药结构的变量喷雾控制系统,包括信息采集单元、信息处理单元和变量喷雾执行单元;
[0043]
一种基于环形施药结构的变量喷雾控制系统,包括信息采集单元、信息处理单元和变量喷雾执行单元;信息采集单元包括垂直方向扫描激光雷达2,水平方向扫描激光雷达3和速度传感器5;本示例中,垂直方向扫描激光雷达2和水平方向扫描激光雷达3采用的是
欧镭激光的lr-1bs2二维激光雷达。lr-1bs2激光雷达的有效工作角度范围是45
°
~315
°
,角度分辨率为0.225
°
,每个工作周期产生1200个有效距离数据点,范围是200~1400,当它的扫描频率为20hz时,其扫描周期为50ms。垂直扫描方向的激光雷达安装在和鼓风机17处于同一水平线上,距离地面0.8米的位置。水平扫描激光雷达安装在垂直扫描激光雷达的正下方,距离地面0.6米。速度传感器5采用gps获取变量喷雾机的速度信息。
[0044]
电源模块1给上层处理的设备进行供电,嵌入式计算机4通过机器人操作系统(ros)分别对垂直方向扫描激光雷达2,水平方向扫描激光雷达3和速度传感器5进行数据采集。信息采集后,嵌入式计算机4作为信息处理单元对这些数据分别进行处理。水平扫描激光雷达3的数据经嵌入式计算机4聚类处理后可以得到植株中心和水平扫描激光雷达3的距离,经坐标换算后得到垂直方向扫描激光雷达和植株中心的距离。嵌入式计算机4结合三个传感器的信息,根据图3的基于环形施药结构的变量喷雾植株冠层体积计算方法流程处理之后,得到植株冠层的体积大小,进一步计算可以分别得到每个喷嘴对应输出的流量以及电磁阀的占空比大小,生成的指令通过串口发送至主控制器6,主控制6根据指令独立控制变量喷雾电磁阀7,从而实现变量喷雾功能。
[0045]
如图2所示,基于环形施药结构的变量喷雾单元结构示意图。变量喷雾作业前打开变量喷雾单元水箱开关9,药液从药箱8流过水箱开关9和过滤器10,通过机械泵11升压流向压力传感器15。变量喷雾控制系统经过信息采集和信息处理后,嵌入式计算机4根据计算得到的植株冠层体积大小分别计算出每个变量喷雾电磁阀7所需的占空比大小。主控制器6根据指令对变量喷雾电磁阀7进行驱动,使药液从变量喷雾电磁阀7流出,通过鼓风机17将雾滴吹响靶标。在使用时观察压力传感器15输出压力,调节减压阀12,直至输出期望水压。减压阀12输出的回流流向药箱8,使用射流搅拌器14使药液混合均匀。
[0046]
如图3所示,基于环形施药结构的变量喷雾喷施区域划分示意图。lr-1bs2激光雷达的有效工作角度范围是45
°
~315
°
,角度分辨率为0.225
°
,每个工作周期产生1200个有效距离数据点,范围是200~1400。本实例采用的变量喷雾机的环形施药结构上的喷嘴在圆弧节点相互间隔22.5
°
,且内倾10
°
,经过计算决定使用的激光点范围为:312~1288,融合扇区范围为:70
°
~290.25
°
。喷施区域18中1~9号区域分别对应的激光点和角度范围为:扇区1对应的激光点范围312~446,对应的角度范围70
°
~101.25
°
;扇区2对应的激光点范围447~547,对应的角度范围101.5
°
~123.75
°
;扇区3对应的激光点范围548~648,对应的角度范围124
°
~146.25
°
;扇区4对应的激光点范围649~749,对应的角度范围146.5
°
~168.75
°
;扇区5对应的激光点范围750~850,对应的角度范围169
°
~191.25
°
;扇区6对应的激光点范围851~951,对应的角度范围191.5
°
~213.75
°
;扇区7对应的激光点范围952~1052,对应的角度范围214
°
~236.25
°
;扇区8对应的激光点范围1053~1153,对应的角度范围236.5
°
~258.75
°
;扇区9对应的激光点范围1154~1288,对应的角度范围259
°
~290.25
°
。
[0047]
如图4所示,靶标植株冠层扇区面积计算示意图。垂直扫描方向激光雷达2距离地面0.8米,以激光雷达连续扫描周期方式对植株冠层进行纵向(yz平面)分割。根据图2可知,激光雷达检测角度被分为9个子区域,根据设定的区域条件分别对每个区域进行面积计算。垂直扫描方向激光雷达2扫描得到植株的高度上限h和由水平扫描方向激光雷达3聚类得到的树干与激光雷达的距离d,可以求出垂直扫描方向激光雷达2与植株高度上限的夹角β;通
过对比垂直扫描方向激光雷达2与z轴之间的夹角α和β的对应关系求得当前激光点于树干边界的距离r。lr-1bs2激光雷达的角度分辨率为0.225
°
,根据扇形面积公式可以计算得出子区域内每个激光点所对应的植株扇区面积
[0048][0049]
式中,r为当前激光点于树干边界的距离,l为激光点到植株冠层外层的距离。对同一个扇区内的所有激光点对应的面积s进行累加,即可得到该喷施子区域的总面积。
[0050][0051]
式中,式中,si为第i扇区的面积,单位为m2;l
ij
为第i扇区第j点激光雷达数据到靶标外层距离;r
ij
为第i扇区第j点激光雷达数据到树干边界的距离;
[0052]
如图5所示,植株冠层体积测量原理示意图。垂直扫描激光雷达2lidar在第i点处在植株冠层外层反射会p点的距离和角度信息,嵌入式计算机4经结算后得到p点与lidar的距离为l,根据图4可计算出lidar到树干边界的距离r,进而求得p点处所对应的扇区面积大小。同时嵌入式计算机4通过结算速度传感器5的信息,得到变量喷雾即当前的行驶速度,结合垂直扫描激光雷达2的扫描周期时间50ms,可以求出每帧数据所对应的扇区体积v。
[0053]
v=0.05*v
car
*s
[0054]
同理,其他点所对应的扇区体积也可以根据上面公式进行求解。对同一个扇区内的所有体积进行相加即可得到该喷施子区域的总体积,对同一侧的喷施子区域的体积进行相加即可以得到植株冠层的单侧总体积。为了匹配电磁阀的响应时间和避免由于空隙而造成激光雷达漏检的情况,采取每两帧数据作为一个喷雾单元进行体积计算的方法。其中,取两帧数据中各喷施子区域面积最大值作为该区域的面积进行体积计算。
[0055]vi
=2*0.05*v
car
*s
i_max
[0056]
式中,vi为各喷施子区域的面积,v
car
为变量喷雾机的行进速度,0.05s为激光雷达的扫描周期;s
i_max
为每两帧扇区面积的最大值。经上述公式计算后可得出每个喷施区域的体积大小。
[0057]
如图6所示,基于环形施药结构的变量喷雾植株冠层体积计算方法流程图。嵌入式计算机4基于机器人操作系统(ros)采用欧镭激光的lr-1bs2二维垂直扫描激光雷达2和二维水平扫描激光雷达3实时采集果园环境的点云数据,通过水平扫描的lr-1bs2激光雷达对树干进行聚类识别,得到树干和水平扫描激光雷达的距离l,经过坐标换算得到垂直激光雷达和树干的距离d。由图3可知,lr-1bs2激光雷达的有效工作角度范围是45
°
~315
°
,角度分辨率为0.225
°
,每个工作周期产生1200个有效距离数据点,范围是200~1400。本实例采用的变量喷雾机的环形施药结构上的喷嘴在圆弧节点相互间隔22.5
°
,且内倾10
°
,经过计算决定使用的激光点范围为:312~1288,融合扇区范围为:70
°
~290.25
°
。根据划分好的喷施区域进行条件设定,采用遍历激光点云的方式对每一帧点云数据进行计算。根据lr-1bs2激光雷达的角度分辨率为0.225
°
可推断出与下一个点云之间的关系,从而进行相邻点云之间的面积计算,对处于同一喷施区域的面积进行累加,进而得到该喷施区域但帧数据的总面积,计算结果存储与面积数组中。本实例采用的电磁阀响应时间为100ms,lr-1bs2激光雷达的扫描频率设定为20hz,扫描周期t
lidar
为50ms,因此决定每两帧数据作为一个喷雾单元。为
了避免由于冠层空隙而造成激光雷达漏检导致精度降低的问题,对每两帧的面积数组进行比较,取各喷施区域面积最大值作为该喷施区域的面积。根据速度传感器获得喷雾机的行进速度v,可求出一个喷雾单元中每个喷施区域所对应的扇格体积,并将结果存储于动态数组中,实现在线持续计算植株冠层体积大小。
[0058]
本发明未尽事宜为公知技术。
[0059]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或实例中。本署名书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以放在任何的一个或多个实施例或示例中以合适的方式结合。
[0060]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实例进行多种变化、修改、替换和变型、本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
