1.本实用新型涉及一种基于就地热再生机组智能联动驾驶系统,属于人工智能和智能家居技术领域。
背景技术:
2.沥青路面就地热再生技术是通过现场加热、翻松路面、添加外加材料、拌合、摊铺、碾压等工序,一次性实现旧沥青路面100%原价值就地循环再生利用。沥青路面就地热再生机组是热再生技术施工的专用设备,作为一种低速行驶的施工车辆,与货车、轿车等普通汽车相比,车速低、行驶在封闭路段,更容易实现自动驾驶。沥青路面就地热再生施工,受季节影响,一般在温度较高的夏季及晚春和早秋施工,作业环境温度一般都在30℃以上,加热后的路面表面温度在150℃左右,现场设备操作人员处于高温,较重的沥青烟和较大的噪声环境中,难免会损害操作人员的身体健康。工程车辆实现智能驾驶,可以减轻驾驶员的劳动强度、降低施工环境对人体的损害,将人们从繁重的操作工作中解放出来,节约施工成本,提高经济效益。急需研制一套就地热再生机组智能联动驾驶系统,实现就地热再生机组的编队智能驾驶,自动施工。
技术实现要素:
3.本实用新型目的是提供了一种基于就地热再生机组智能联动驾驶系统,能够实现就地热再生机组的智能驾驶、自动施工。
4.本实用新型为实现上述目的,通过以下技术方案实现:
5.一种基于就地热再生机组智能联动驾驶系统,包括路径采集装置、差分gps基站、管理控制中心和驾驶室主控单元;
6.差分gps基站用于路径点采集装置和工程车辆的辅助定位;路径采集装置与管理控制中心进行通信;管理控制中心安装在就地热再生机组的首车上;
7.驾驶室主控单元包括车辆控制器、电源转换电路、数字量接口、模拟量接口、无线通信接口、ttl串行接口、r485接口、通讯接口1和通讯接口2,车辆控制器经模拟量接口1与超声波传感器通讯,车辆控制器经模拟量接口2与燃油流量计进行通讯,车辆控制器输入端分别经ttl串行接口、r485接口、通讯接口1和通讯接口2与差分gps定位器、热红外传感器、速度方向传感器以及车辆火控制器通信,车辆控制器输出端与数量接口连接。
8.所述基于就地热再生机组智能联动驾驶系统优选方案,车辆控制器stm32f103vc芯片为主处理器,包括tm32f103vc芯片和max232 芯片,tm32f103vc芯片由can控制器引出信号发送端经6n137搭建的光耦隔离电路进行电平转换,将3.3v电压转为5v,信号输出端接can收发器tja1050t,tja1050t接外围电路控制输出高低电平。
9.所述基于就地热再生机组智能联动驾驶系统优选方案,通讯接口1为can接口1,通讯接口2为can接口2或rs485。
10.本实用新型的优点在于:
11.(1)就地热再生机组智能联动驾驶系统,实现了就地热再生加热机组的智能驾驶,施工人员得以从恶劣的施工环境中脱离解放出来,提高了工程施工的自动化、智能化水平。
12.(2)解决了操作员长时间驾驶,无法保持车距近距离稳定的问题,大大降低了热损耗,实现了节能减排、有效提高了施工效率。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
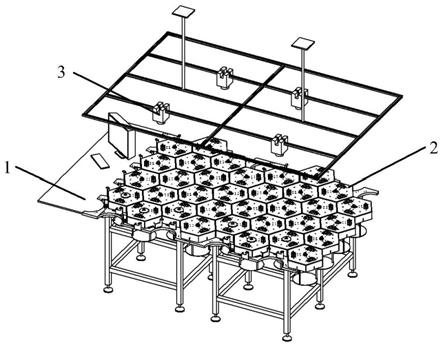
14.图1为本实用新型实施例的系统结构示意图。
15.图2为本实用新型实施例的系统组成示意图。
16.图3为本实用新型实施例的管理控制中心电路原理图。
17.图4为本实用新型实施例的驾驶室主控单元电路原理图。
18.图5为本实用新型实施例的驾驶室主控单元通讯示意图。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.参考图1及图2,一种基于就地热再生机组智能联动驾驶系统,包括路径采集装置、差分gps基站、管理控制中心和驾驶室主控单元;
21.差分gps基站用于路径点采集装置和工程车辆的辅助定位;
22.路径采集装置根据施工情况采集路径,路径采集装置通过对行驶路线上的关键点进行定位,将这些离散的关键点进行曲线拟合,并将路径参数化后下发给管理中心,路径采集装置采集路径进行曲线拟合为现有技术在此不予描述;
23.管理控制中心安装在就地热再生机组的首车上;
24.参考图5,驾驶室主控单元包括车辆控制器、电源转换电路、数字量接口、模拟量接口、无线通信接口、ttl串行接口、r485接口、通讯接口1和通讯接口2,车辆控制器经模拟量接口1与超声波传感器通讯,车辆控制器经模拟量接口2与燃油流量计进行通讯,车辆控制器输入端分别经ttl串行接口、r485接口、通讯接口1和通讯接口2与差分gps定位器、热红外传感器、速度方向传感器以及车辆火控制器通信,车辆控制器解算后经输出端与数量接口连接。本实用新型实施例中,通讯接口1为can接口1,通讯接口2为can接口2或rs485。
25.参考图3,管理控制中心采用32位cortex_m3内核的arm控制器stm32f767作为控制核心,具有改善电源电路,改善电源电路具有二极管d1、保险丝f1、瞬态抑制二极管t1、电容c2和共模电感u4;经改善电源改善后电源一部分经mp1584降压为vcc_5a,还有一部分经vrb2412ymd隔离产生12v电源,再经mp1584降压为vcc5;vcc5经as1117-3.3降压为3.3v;sn653082e485芯片输出端经2个双向tvs二极管接rs485接口。
26.参考图4,车辆控制器stm32f103vc芯片为主处理器,包括tm32f103vc芯片和max232 芯片,tm32f103vc芯片由can控制器引出信号发送端经6n137搭建的光耦隔离电路
进行电平转换,将3.3v电压转为5v,信号输出端接can收发器tja1050t,tja1050t接外围电路控制输出高低电平。
27.整个联动过程中,首车上的管理控制中心与编队车辆主控制器实时通讯。通过无线通讯模块依次查询五辆车,做到了实时、准确、稳定。联动过程中各个车之间的车距也是可以设定的,根据实际车距与设定车距的偏差来调节速度,工程车辆通过获取计算前车的位置信息与自身的位置信息来调整和保持车距。通过控制首车车速,后面的车辆会通过车距自动调节速度,对首车速度进行跟踪,达到五辆车车间距与车速稳定。在进行车距调节时,通过一个闭环的pid系统调节,通过实际车距与设定车距的偏差调节车速。如果车距过大,通过闭环的pid调节,速度将自动增加,减小车距,当车距减小到一定的距离时,速度减小。同理,车距变小时,速度减小,车距增加,增加到一定距离时速度增加。使其车队的车距和车速相对稳定。
28.在智能驾驶、自动施工的过程中,为确保施工过程中的安全性,每辆工程车辆加装了两个超声波传感器,用于检测前方障碍物。在自动驾驶过程中,超声波发射器向外发射出超声波,当遇到障碍物时,超声波接收器接收回波,并利用时间差完成测距,然后经内部电路将距离信号转换为电流信号。将电流信号转变为车辆控制器能直接采集的电压信号,经过模数转换成数字量信息,通过对数字量信息的比对,判断车辆前方是否有障碍物及车辆与障碍物的距离。障碍物距车在1米范围内时,车辆鸣笛;0.5m范围内时自动停止行驶。
29.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。