1.本技术涉及船舶运动控制半实物仿真技术领域,具体涉及一种电驱动舵减摇半实物仿真系统。
背景技术:
2.船舶在风浪中航行产生六自由度摇摆运动,其中过大的横摇运动严重影响船载电气设备的正常运行、船员的舒适度和安全性,是船舶运动控制中的重要问题。横摇减摇最有效的装置是减摇鳍,成对儿安装于船体两侧通过转鳍运动产生升力以对抗海浪扰动力,具有价格昂贵、安装和维护成本高且占用船体空间等缺点。自动舵用于控制船舶航向,是常规水面船必须装备的,自动舵转动翼面时可产生附加横摇力矩,在实现航向保持的同时可以辅助减摇,即,舵减摇。舵减摇具有节省空间、不会增加附体阻力、价格低廉维护成本低、易于现有船舶安装和改造等优势,因此,欠驱动船舶可通过舵减摇的方式实现横摇减摇。
3.航向自动舵的伺服系统通常为阀控液压驱动装置,存在操舵噪声大、响应速度不足、磨损大和卡舵等缺点,同时需要配备油泵站等设备占用船舱空间。舵减摇对舵的响应速度较高,需要高频转舵才能产生足够的横摇力矩,用电驱动舵减摇系统取代液压舵系统能够有效避免这些缺点。半实物仿真是用计算机模拟被控对象和外部环境扰动,结合执行机构实物进行实验的技术,它是一种更接近工程实际的仿真实验技术,这种仿真技术可用于验证和修改控制器的设计、产品定型改进和出厂检验等方面,采用半实物仿真手段可有效缩短控制系统的研发周期并减少资源浪费。
技术实现要素:
4.为了解决或部分解决相关技术中存在的问题,本技术提供了一种电驱动舵减摇半实物仿真系统,解决液压驱动舵减摇半实物仿真系统的响应速度不足和维护难问题,并降低开发成本。
5.本技术提供了一种电驱动舵减摇半实物仿真系统,包括:主控机、四自由度摇摆台、陀螺仪、运动控制器、电伺服装置、减速器、舵、加载装置和舵角测量装置;
6.所述主控机用于接收所述舵角测量装置发出的舵角电信号并向所述四自由度摇摆台发出船舶运动电信号;
7.所述四自由度摇摆台用于接收所述主控机发出的船舶运动电信号并模拟船舶四自由度摇摆运动;
8.所述陀螺仪用于测量所述四自由度摇摆台的摇摆运动,并输出摇摆运动电信号;
9.所述运动控制器用于接收所述陀螺仪发出的摇摆运动电信号并输出指令舵角电信号;
10.所述电伺服装置用于接收指令舵角电信号并驱动所述舵转动实现操舵;
11.所述舵角测量装置用于测量实际舵角并输出舵角电信号给所述主控机,进而整个系统实现闭环控制;
12.所述加载装置用于模拟舵的流体负载,向舵施加负载力。
13.可选地,所述四自由度摇摆台为电驱动摇摆台,摇摆运动包括:纵荡、横荡、横摇和艏摇。
14.可选地,所述四自由度摇摆台的载重大于或等于120kg。
15.可选地,所述四自由度摇摆台的摇摆运动范围为:纵荡-1.5m~ 1.5m,横荡-1.5m~ 1.5m,横摇-30
°
~ 30
°
,艏摇-30
°
~ 30
°
,纵荡速度-2.5m/s~ 2.5m/s,横荡速度-2.5m/s~ 2.5m/s,横摇角速度-30
°
/s~ 30
°
/s,艏摇角速度-30
°
/s~ 30
°
/s,纵荡加速度-3m/s2~ 3m/s2,横荡加速度-3m/s2~ 3m/s2,横摇角加速度-60
°
/s2~ 60
°
/s2,艏摇角加速度-60
°
/s2~ 60
°
/s2;该摇摆运动范围可以满足中小型欠驱动船舶的测试需求。
16.可选地,所述主控机包括海浪发生器、船舶运动模型数值计算和人机界面。
17.可选地,所述运动控制器包括航向控制器和横摇控制器。
18.可选地,所述四自由度摇摆台为电驱动摇摆台。
19.可选地,所述电伺服装置包括变频器、永磁同步伺服电机和减速器。
20.可选地,所述加载装置由两台阻尼电机构成。
21.可选地,所述陀螺仪为角速度陀螺仪,用以测量横摇角速度和艏摇角速度,横摇角和艏摇角可以通过对横摇角速度和艏摇角速度进行积分计算获得。
22.本技术提供的技术方案可以包括以下有益效果:
23.本发明公开了一种电驱动舵减摇半实物仿真系统,采用电驱动摇摆台和电驱动舵相结合的方式实现全电驱动的半实物仿真系统,相较于液压舵系统具有易维护、易安装、响应速度高和成本低的特点,为电动舵减摇控制装置的研发和实验提供了良好支撑。
24.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
25.为了更清楚地说明本技术专利实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术专利的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
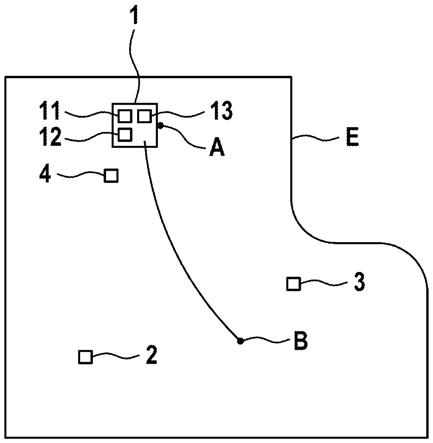
26.图1为本技术实施例中系统结构示意图;
27.图2为本技术实施例中主控机功能结构示意图;
28.图3为本技术实施例中运动控制器功能结构示意图;
29.图4为本技术实施例中电伺服装置结构示意图;
30.图5为本技术实施例中加载装置结构示意图所示。
具体实施方式
31.下面将参照附图更详细地描述本技术的实施方式。虽然附图中显示了本技术的实施方式,但是应该理解的是,可以以各种形式实现本技术而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本技术更加透彻和完整,并且能够将本技术的范围完整地传达给本领域的技术人员。
32.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
33.应当理解,尽管在本技术可能采用术语“第一”、“第二”、“第三”等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本技术范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
34.下文将结合附图1至5对本技术实施例的技术方案进行详细描述。
35.本实施例提供了一种电驱动舵减摇半实物仿真系统,如图1所示,包括:主控机、四自由度摇摆台、陀螺仪、运动控制器、电伺服装置、减速器、舵、加载装置和舵角测量装置。
36.所述的主控机用于接收舵角测量装置发出的舵角电信号并向四自由度摇摆台发出船舶运动电信号;所述的四自由度摇摆台用于接收主控机发出的船舶运动电信号并模拟船舶四自由度摇摆运动;所述的陀螺仪用于测量四自由度摇摆台的摇摆运动,并输出摇摆运动电信号;运动控制器用于接收陀螺仪发出的摇摆运动电信号并输出指令舵角电信号,所述的电伺服装置用于接收指令舵角电信号并驱动舵转动实现操舵;所述的舵角测量装置用于测量实际舵角并输出舵角电信号给主控机,进而整个系统实现闭环控制;加载装置用于模拟舵的流体负载,向舵施加负载力。
37.所述的四自由度摇摆台为电驱动摇摆台,载重大于等于120kg,摇摆运动包括:纵荡、横荡、横摇和艏摇。
38.所述的四自由度摇摆台的摇摆运动范围为:纵荡-1.5m~ 1.5m,横荡-1.5m~ 1.5m,横摇-30
°
~ 30
°
,艏摇-30
°
~ 30
°
,纵荡速度-2.5m/s~ 2.5m/s,横荡速度-2.5m/s~ 2.5m/s,横摇角速度-30
°
/s~ 30
°
/s,艏摇角速度-30
°
/s~ 30
°
/s,纵荡加速度-3m/s2~ 3m/s2,横荡加速度-3m/s2~ 3m/s2,横摇角加速度-60
°
/s2~ 60
°
/s2,艏摇角加速度-60
°
/s2~ 60
°
/s2;该摇摆运动范围可以满足中小型欠驱动船舶的测试需求。
39.所述的陀螺仪为角速度陀螺仪,用以测量横摇角速度和艏摇角速度,横摇角和艏摇角可以通过对横摇角速度和艏摇角速度进行积分计算获得。
40.所述的主控机的功能如图2所示,包括海浪发生器、船舶运动模型数值计算和人机界面,海浪发生器复杂模拟随机海浪扰动,与主控机接收的舵角电信号一并作为船舶运动模型的输入,通过数值计算求解船舶运动状态,由主控机发出船舶运动电信号,人机界面复杂人机交互,可以设置海浪发生器和船舶模型的参数,同时显示海浪扰动和船舶运动状态曲线。
41.所述的运动控制器的功能如图3所示包括:航向控制器和横摇控制器,输入的摇摆运动电信号,通过航向控制器和横摇控制器计算获得所需的舵角并输出指令舵角电信号。
42.所述的舵角测量装置为角度传感器。
43.所述的电伺服装置如图4所示,包括:变频器、永磁同步伺服电机和减速器,变频器为与永磁同步伺服电机相配套品牌的变频器,减速器为齿轮减速机并需要预留出角度传感
器的安装位置,输入为指令舵角电信号,输出为机械角度,用以带动舵旋转。
44.所述的加载装置如图5所示,由两台阻尼电机构成,分布在舵的两侧,分别向舵施加相反方向的负载力,用于模拟操舵运动时舵的流体负载。
45.所述的舵可采用naca0015系列的形状,参见图书《船用翼理论》王献孚著。
46.以上所述,仅为本技术的实施例而已,并非用于限定本技术的保护范围。凡在本技术的精神和范围之内做出的任何修改、等同替换和改进等,均包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。