1.本发明涉及一种具有对角分体式布局的车辆制动系统,更具体地说,涉及一种用于建议驾驶员转向调节以补偿在制动回路中的一个制动回路不起作用时的自转向效应的系统和方法。
背景技术:
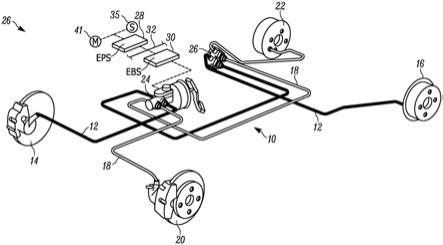
2.参照图1,示出了传统的车辆制动系统,其总体上用10表示,具有对角分体式布局。系统10包括两个制动回路。第一回路包括连接在右前盘式制动器14和左后鼓式制动器16之间的第一液压制动管线12,第二回路包括连接在左前盘式制动器20和右后鼓式制动器22之间的第二液压制动管线18。串联主缸24控制制动管线12、18中的流体流动。还提供制动压力控制阀26。
3.对于系统10,如果回路中的一个回路(制动管线12或18)发生故障或不能操作,则制动仅在两个成对角布置的轮(左前轮和右后轮,或右前轮和左后轮)处可用。在硬制动情况下,车辆往往会朝向具有制动扭矩的前轮侧自动转向,这会增加车辆打滑和失去控制的可能性。
4.因此,在对角分体式制动系统中需要消除当制动回路中的一个制动回路不起作用时的自动转向效应。
技术实现要素:
5.本发明的目的是满足上面提到的需求。根据实施例的原理,该目的通过在制动系统故障时校正车辆转向的方法来实现。该制动系统具有对角分体式布局,包括两个制动回路,即第一制动回路和第二制动回路,第一制动回路包括连接在右前制动器和左后制动器之间的第一液压制动管线,第二制动回路包括连接在左前制动器和右后制动器之间的第二液压制动管线。制动系统还包括主缸,该主缸被配置和布置成控制制动管线中的流体流动。该方法提供一种电子制动系统(ebs),该电子制动系统包括具有处理器电路的控制单元。该控制单元被配置和布置成控制主缸的操作。提供了一种电子动力转向系统(eps),该电子动力转向系统包括处理器电路、被配置和布置成测量车辆的转向柱的运动和扭矩的传感器、以及被配置和布置成向转向柱提供扭矩的马达。在驾驶员制动期间,ebs确定是否制动回路中的一个制动回路发生故障,导致车辆的转向朝向具有制动扭矩的前轮侧偏离。当制动回路中的一个制动回路发生故障时,处理器电路中的一个计算由驾驶员仅用一个起作用的制动回路进行制动而引入的偏航扭矩值。基于从eps的传感器获得的转向轮转角和转向轮扭矩并且基于偏航扭矩值,处理器电路计算转向轮扭矩请求,该转向轮扭矩请求限定为了抵消偏航扭矩值所需的转向轮扭矩/转角。转向轮扭矩请求被发送到eps,其中,eps提供驾驶员转向建议以补偿转向偏差。如果驾驶员接受建议,则eps操作马达以补偿转向偏差。
6.根据实施例的另一方面,提供了一种控制系统,用于在制动系统故障时校正车辆的转向。该制动系统具有对角分体式布局,包括两个制动回路,即第一制动回路和第二制动
回路,第一制动回路包括连接在右前制动器和左后制动器之间的第一液压制动管线,第二制动回路包括连接在左前制动器和右后制动器之间的第二液压制动管线。制动系统还包括主缸,主缸被配置和布置成控制制动管线中的流体流动。控制系统包括电子动力转向系统(eps),该电子动力转向系统具有处理器电路、被配置和布置成测量车辆的转向柱的运动和扭矩的传感器,并包括被配置和布置成向转向柱提供扭矩的马达。提供了一种电子制动系统(ebs),该电子制动系统包括具有处理器电路的控制单元。控制单元被配置和布置成控制主缸的操作。通信总线电连接eps和ebs。在驾驶员制动期间,在制动回路中的一个制动回路发生故障导致车辆的转向朝向具有制动扭矩的前轮侧偏离的情况下,处理器电路中的至少一个被配置和布置成计算由驾驶员仅用一个起作用的制动回路进行制动而引入的偏航扭矩值。基于从eps的传感器获得的转向轮转角和转向轮扭矩以及基于偏航扭矩值,处理器电路计算转向轮扭矩请求,转向轮扭矩请求限定为了抵消偏航扭矩值所需的转向轮扭矩/转角。转向轮扭矩请求被发送到eps,并且基于转向轮扭矩请求,eps被配置和布置成操作马达以补偿转向偏差。
7.当参照附图考虑以下详细描述和所附权利要求时,本发明的其他目的、特征和特性,以及操作方法和结构的相关元件的功能,部件的组合,和制造的经济性将变得更加明显,所有这些都构成本说明书的一部分。
附图说明
8.通过以下结合附图对本发明的优选实施例的详细描述,本发明将被更好地理解,在附图中:
9.图1是具有对角分体式布局的车辆制动系统的示意图。
10.图2是根据实施例提供的包括具有对角分体式布局的车辆制动系统的控制系统的示意图。
11.图3是图2的控制系统的电子动力转向系统和电子制动系统的示意图,该电子动力转向系统和电子制动系统被示出为联接到车辆总线网络。
12.图4是图2的车辆制动系统在只有一个制动回路操作时的驾驶员制动效果的示意图。
13.图5是示出了计算最终转向轮扭矩请求以抵消在图4的条件下由驾驶员制动引入的偏航扭矩的示意图。
14.图6是当制动系统10中只有一个回路操作时使用图2的系统校正转向的过程的流程图。
具体实施方式
15.参照图2,示出了根据实施例的车辆控制系统,其总体上用26表示。系统26包括图1的具有对角分体式布局的传统车辆制动系统10。制动系统10包括两个制动回路。第一回路包括连接在右前轮的右前盘式制动器14和左后轮的左后鼓式制动器16之间的第一液压制动管线12,第二回路包括连接在左前轮的左前盘式制动器20和右后轮的右后鼓式制动器22之间的第二液压制动管线18。串联主缸24控制制动管线12、18中的流体流动。还提供了制动压力控制阀26。在图2中没有示出轮。
16.车辆控制系统26包括电子动力转向系统(electronic power steering system,eps)28和电子制动系统(electronic brake system,ebs)30,电子动力转向系统和电子制动系统中的每一个被示出为电耦合到车辆总线网络32。参照图3,ebs 30包括电子控制单元(electronic control unit,ecu)33,该电子控制单元可以评估来自各种传感器(未示出)的信号,所述传感器诸如为用于监测车辆旋转行为的轮速度传感器。ecu 33根据特定情况的控制算法控制主缸24的泵和传统制动系统10的阀(未示出)。eps 28包括处理器电路31和传感器35(例如扭矩角传感器和转向角传感器),以测量转向柱41的运动和扭矩。该信息为ecu 37提供数据,以施加从电动马达43提供的辅助扭矩的变化量,从而匹配驱动条件。下面将说明eps 28和ebs 30的进一步功能。
17.参照图4,如果回路中的一个回路(例如,图2的制动管线12)发生故障或不能操作,则制动仅在两个成对角布置的轮处可用,即在左前轮36和右后轮38处可用。通过驾驶员制动产生偏航扭矩34,并且在前轮36和成对角布置的后轮38处产生制动扭矩。这导致车辆转向以朝向具有制动扭矩的前轮侧偏离。为了确定制动扭矩,在ebs 30中提供压力传感器来测量主缸压力。制动扭矩是根据车辆基础制动特性从制动压力转换而来的。一旦确定了车辆和基础制动器,就用多个参数来控制/校准这种转换(压力-巴和扭矩-nm之间的转换)。因此,对于没有单独的轮压力传感器的车辆,轮制动压力通常是通过ebs软件内的轮压力模型来估计的。替代地,可以根据由与每个轮相关联的制动压力传感器39获得的数据来确定制动扭矩。
18.图5示出了根据实施例的通过ebs ecu 30的处理器电路40对转向轮扭矩的计算。在方框49中,基于前轮36上的制动扭矩42的输入、后轮38上的制动扭矩44的输入、前轮36到车辆重心(center of gravity,cog)的x-距离46的输入以及后轮38到cog的y-距离48的输入,处理器电路40计算由驾驶员仅用一个起作用的制动回路进行制动而引入的偏航扭矩(yawtorque)50的值。在方框52中,基于从eps 28的传感器35获得的偏航扭矩50、转向轮转角54和转向轮扭矩56,通过处理器电路40计算转向轮扭矩请求58,该转向轮扭矩请求是为了抵消由驾驶员制动引入的偏航扭矩50所需的转向轮扭矩/转角。接下来,在方框59中,处理器电路40可基于安全要求(例如,道路条件、车辆速度)来调整或限制转向轮扭矩请求58,以防止转向过度或转向不足情况。然后,处理器电路40输出最终转向轮扭矩请求58’。
19.注意,由于ebs和eps通过总线32连接,而不是通过ebs的执行上述计算的处理器电路40连接,因此可以将来自ebs的数据发送到eps,并且eps的处理器电路31可以执行上述计算,或者可以通过总线32上可用的任何其他处理器电路来执行计算。通过使用大陆公司(continental corporation)的驾驶员转向建议(driver steering recommendation)软件可以知道这种计算,该软件生成附加的转向轮扭矩偏移,以向驾驶员提供在不同摩擦系数的道路上制动(利用功能齐全的制动系统)时如何以正确的方式作出反应的建议。
20.参照图6,将理解当仅有制动系统10的一个回路可操作时使用系统26校正转向的过程。在步骤60,ebs 30确定制动器布局是否为对角分体式布局。如果是,则在步骤62中,检查eps 28,以查看eps 28是否被配置为“开启”。如果eps 28开启,则在步骤64,ebs 30确定驾驶员制动扭矩(来自制动压力传感器39)是否高于定义的阈值,如果是,则在步骤66,确定ebs 30是否检测到制动系统10的两个制动回路中的一个出现故障。在步骤68,ebs 30检测是否存在使制动系统10的操作制动回路的功能退化的任何故障。如果不存在这样的故障,
则在步骤70,处理器电路40以图5所述的方式计算偏航扭矩50。此后,以图5所示的方式计算转向轮扭矩请求58。接下来,在步骤72,基于如上所述的安全要求,确定轮扭矩请求58是否需要调整或限制。此后,ebs 30在车辆总线32上输出最终转向轮请求58’。在步骤78,eps 28接收最终转向轮请求58’,并基于此,eps 28例如通过可听音调或可视指示向驾驶员提供转向建议。如果驾驶员通过提供输入来接受该建议,则eps 28使与转向柱41相关联的马达43运行,以补偿由于制动回路中仅有一个制动回路起作用而导致的转向偏离。可以理解,如果需要,esp 28可以自动补偿转向偏离,而无需来自驾驶员的输入。
21.本文描述的操作和算法可以被实现为具有如上所述的相应处理器电路31和40的ecu 37或ecu 33内的可执行代码,或者可以存储在独立计算机或机器可读的非暂时性有形存储介质上,本文描述的操作和算法是基于由使用一个或多个集成电路实现的处理器电路来执行代码而完成的。所公开电路的示例性实施方式包括在逻辑阵列(诸如可编程逻辑阵列(pla)、现场可编程门阵列(fpga))中实现的硬件逻辑,或者通过集成电路(诸如专用集成电路(asic))的掩模编程实现的硬件逻辑。这些电路中的任何一个也可以使用基于软件的可执行资源来实现,该可执行资源由相应的内部处理器电路(例如微处理器电路(未示出))执行并且使用一个或多个集成电路来实现,其中,存储在内部存储器电路中的可执行代码的执行使得实现处理器电路的一个或多个集成电路将应用状态变量存储在处理器存储器中,从而创建执行如本文所述的电路的操作的可执行应用资源(例如,应用实例)。因此,在本说明书中术语“电路”的使用指的是使用一个或多个集成电路实现并包括用于执行所述操作的逻辑的基于硬件的电路,或者是包括处理器电路(使用一个或多个集成电路实现)的基于软件的电路,该处理器电路包括处理器存储器的预留部分,该预留部分用于存储通过处理器电路执行可执行代码而被修改的应用变量和应用状态数据。存储器电路80可以例如使用非易失性存储器(诸如可编程只读存储器(prom)或eprom)和/或易失性存储器(诸如dram等)来实现。
22.为了说明本发明的结构和功能原理,以及说明采用优选实施例的方法,已经示出和描述了上述优选实施例,并且在不偏离这些原理的情况下可以对这些优选实施例进行改变。因此,本发明包括包含在所附权利要求的精神内的所有修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。