1.本发明涉及一种用于检测管道内部复杂系统状况的机载瑞利波与兰姆波机器人,具体涉及一种装载多种环境传感器、瑞利波与兰姆波激发与接收装置,机械手臂以及机载计算机的管道检测机器人。
背景技术:
2.管道,尤其是长距离输油管道,通常是被分段一一组装焊接的。每段管道的端部对缝放置在一起进行环焊焊接。这些环焊缝质量可变,因为它们通常在极端条件下焊接,例如管道铺设驳船上或在沙漠中,同时经过长时间的使用,管道内部形成了情况各异的复杂系统,包括管壁的瑕疵/裂缝的演化、焊缝的质变情况以及温湿度、酸碱性的非线性变化等等。因此,管道需要定期进行检查,确保管道的质量安全。在许多情况下,地下、海下和地表安装的管道通常受到外部保护涂层和包胶的保护。如果从管外进行检测,那将耗时费力以及成本昂贵。因此,需要一种管道内检测的设备和方法,其允许管道复杂系统的检查,尤其是环焊缝的内部检查。
3.目前世界上的管道内检测技术大多采用三轴漏磁、超声、电磁超声以及远场涡流等技术,实现了金属损失、裂纹、涂层和防护层剥离等缺陷的检测与识别。目前,全世界最先进的检测技术与设备主要集中在美国 ge pii、德国 rosen 和加拿大russel 等公司,国际市场上常见的内检测设备主要有ge pii 的三轴漏磁检测器“magnescantriax”、圆周漏磁检测器“transcan”、超声检测器“ultrascan cd tm / ultrascan duo”和电磁超声检测器“ematscan tmcd”,rosen的圆周漏磁检测器“rocorr cmf”、超声检测器“rocorr ut”、超声漏磁检测器“rocorr mfl/ut”、电磁超声检测器“rocd2”以及russel的远场涡流检测器“ferroscope r308”。此类设备一般搭载在管道猪上,但是管道猪设备在管道里运动的比较缓慢,像猪一样在里面拱,且不能回头,而且其工作时发出刺耳的声音,类似于猪的嚎叫,因此起名为猪。除此之外,管道猪价格昂贵,一般市场售价在千万元以上,同时自身机构复杂,容易出现故障,无法满足大规模长期使用。除此之外的其他管道机器人,有的结构精巧但无法装载其他复杂的设备,有的功能单一且无法完成对管内复杂情况的探测与分析。有的功能强大但结构复杂而且费用昂贵。
4.文献1:中国实用新型cn201921660658.x公开了一种自适应自主转向的轮式管道机器人,通过弹性伸缩臂绕竖直轴的旋转和蜗轮蜗杆机构将动力通过涡轮传递至皮带传动机构的滚轮,使滚轮沿管壁向前运动,实现机器人的转弯。虽然其结构灵巧,可以解决了管道机器人自主转向的问题,但是其很难搭载超声检测器或漏磁检测器等复杂的设备,无法进行实质有效的管道检测。
5.文献2:中国实用新型cn201620688416.1公开了一种用于管道机器人的多功能环及防撞管道机器人,其通过设置一个可以拨动的u型的多功能环,防止摄像头撞到障碍物和管壁的作用,使用带绳索的挂钩钩住多功能环,实现管道机器人上下检测井。但是其最多只
能搭载一个摄像头,其他设备均无搭载,由于管道内摄像头的视野具有很大的局限性,无法100%的检测管内的细微情况,例如环焊逢处是否有瑕疵或裂缝等。
6.文献3:中国发明专利cn201810346523.x公开了一种可调速的海底石油管道清洁猪,结构间通过法兰连接,能够使管道猪在清管作业中维持比较稳定的速度,对速度的改变比较敏感。但是此管道猪是用于清洁石油管道,在结构上并无法搭载超声检测器或漏磁检测器等复杂的设备,无法进行实质有效的管道检测。
7.文献4:中国发明专利cn201410660632.0公开了一种基于旋转电磁场的管道检测装置,特别涉及一种基于旋转电磁场的管道检测装置。其激励线圈内部分别通入相位依次相差120度的三相交流电,交变磁场在管道内壁上产生循环流动涡流,涡流经过缺陷时会发生畸变并引起空间磁场畸变信号,从而可获取缺陷的大小和位置信息。其以管道猪为载体,实现涡电流在管道内壁的自动旋转,快速识别缺陷并能够确定缺陷的位置和大小。但是其结构十分复杂,不易再搭载摄像头其他等设备;同时,其造价昂贵,目前每公里管道的检测费用以上万美元计算。
8.实现管内复杂情况的检测,系统常常需要搭载多种传感器与设备。同时,由于管内情况复杂,在检测进行中,系统往往更多的信号输出通道以获取冗余的数据信息以便容错,以及稳定的工作电压,同时最好具有成本低、体积小的优点。
技术实现要素:
9.本发明所涉及一种用于检测管道内部复杂系统状况的机载瑞利波与兰姆波移动机器人,用于检查管道内部复杂情况,尤其是环焊缝处的情况。机器人包括:多轴机械臂,瑞利波与兰姆波激发与接收阵列组件、喷水系统、机载计算机、控制器模块、数据采集器、电池组、车轮、车体框架、减震器、陀螺仪、环境传感器阵列、防水摄像机、动态力反馈系统、机载双向无线电发射与接收器。
10.所述机械臂固定在车体框架上,能够伸展延伸到车体之外,机械臂执行末端可以接触到管道内壁。当移动机器人在管道内时沿着管道纵向位移时,所述机械臂收缩,其执行末端不接触管道内壁;当移动机器人进行管壁检测时,机械臂可以伸展,使其执行末端靠近或紧贴待观测处。机械臂执行末端搭载了动态力反馈系统、瑞利波与兰姆波激发与接收阵列组件、防水摄像机。
11.所述的动态力反馈系统,由力学传感器构成,其与多轴机械臂的各关节电机驱动构成了位置与应力的闭环控制系统。该系统保障在机械臂旋转时瑞利波与兰姆波阵列能够一直保持贴靠在管壁上而不松动,能够维持接触面恒定力并抵消机器人由于位移误差或其他突发状况而产生的接触面作用力干扰。
12.所述的防水摄像机接收信息可以辅助操作者实时观测管内情况以及精细调节机械臂的旋转。
13.所述机械臂的基座可以沿垂直车体的轴方向360
°
旋转;所述机械臂的执行末端装备了瑞利波与兰姆波阵列组件;所述瑞利波与兰姆波阵列组件包括至少一个具有用于瑞利波与兰姆波激发与接收的探头阵列;控制器模块固定在所述车体框架上,负责驱动车轮、控制机械臂的运动位置以及喷水系统的开启和关闭;机载计算机连接到所述机器人控制器模块并且能够通过双向无线链路向外界的操作人员发送数据以及接收外界发来的指令信号。
14.所述的瑞利波与兰姆波激发与接收阵列组件,其中包括激发与接收瑞利波与兰姆波的探头;探头一般由压电陶瓷材料制作而成,高频变换的方差电压信号通过压电陶瓷转换为高频机械振动,在接触管壁内表面时,在管内表面以及管壁内部形成瑞利波和兰姆波。兰姆波和瑞利波都属于超声波的一种。兰姆波是板波的一种,是管壁厚度与透入的声波波长相当时在管壁中激励而成对的应力波,其又分为对称型(s型)和非对称型(a型),指因物体两平行表面所限而形成的纵波与横波组合的波,它在整个物体内传播,质点作椭圆轨迹运动,因物体两平行表面所限而形成的纵波与横波组合的波,它在整个物体内传播,质点作椭圆轨迹运动。兰姆波在管壁中传播时,如遇到管壁基体组织发生显著变化的情况,类似管壁内部分层、孔洞、内部瑕疵等缺陷时,会发生反射和散射现象,使得接收到的响应信号和波包幅值、频率成分以及模式发生变化。这些信号由探头采集并转化为电信号传输到机载计算机。通过对信号的分析,提取出其中所含的缺陷信息,就可以对管壁的缺陷的存在、当量大小、类型以及位置进行判别,从而实现对管壁,尤其是易发生情况的焊接处的,无所检测与评价。瑞利波是一种常见的界面弹性波,是沿半无限弹性介质自由表面传播的偏振波。与兰姆波的板波特性不同,瑞利波是表面波,即可以扫频检测管壁内表面的损伤[1]。同理,瑞利波在管壁内表面传播时,如遇到内表面发生显著异常的情况,类似管壁孔洞、瑕疵等缺陷时,会发生反射和散射现象,使得接收到的响应信号和波包幅值、频率成分以及模式发生变化。这些信号由探头采集并转化为电信号传输到机载计算机。通过对信号的分析,提取出其中所含的缺陷信息,就可以对管壁内表面的缺陷的存在、当量大小、类型以及位置进行判别,从而实现对管壁内表面的无所检测与评价。理论可参考文献:z. zhang, j. zhao, and y. pan*,
ꢀ“
surface circular-arc defects interacted by laser-generated rayleigh wave”, ultrasonics, vol. 103: 106085, (2020). (sci收录, 影响因子2.598)在本发明在某些实施案例中,机器人还包括靠近瑞利波与兰姆波激发与接收阵列组件和在配合此阵列组件工作的喷水系统。当机器人进行检测工作时,对待测位置进行加压喷水,一则可以对待检测位置进行清洗,二则可以让探头阵列耦合吸附在待检测管壁上,即探头与管壁内表面之间没有空气,使瑞利波与兰姆波更有效的激发。所述喷水系统包括加压储水箱与水分散系统,水分散系统连接加压储水箱,水分散系统的开关由控制器模块控制,加压储水箱固定在所述车体框架上。
[0015]
本发明在某些实施案例中,机器人还包括温湿度传感器、气体传感器与陀螺仪,以供机器人探测各种不同的管内环境参数以及管道相对于水平面倾斜的角度。机器人的轮子可以由用户根据需要进行更换,以适应不同直径的管道。
附图说明
[0016]
图1是本发明一种用于检测管道内部复杂系统状况的机载瑞利波与兰姆波机器人的一个实施案例示意图。
[0017]
图2是本发明一种用于检测管道内部复杂系统状况的机载瑞利波与兰姆波机器人的主体与管道外工作站的案例示意图。
具体实施方案
[0018]
以下结合附图,详细说明本实用发明的实施方案。
[0019]
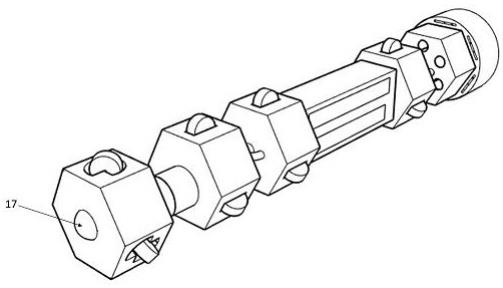
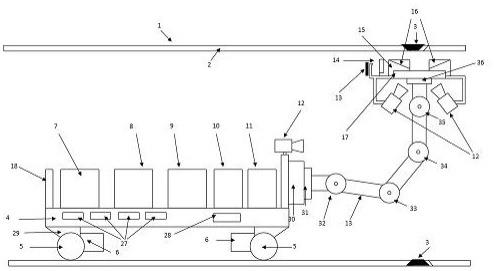
结合图1,本发明用于检测管道内部复杂系统状况的机载瑞利波与兰姆波机器人,其主体包括车体框架4、车轮5、减震器29、电机6、电池组7、机载计算机8、数据采集器9、加压储水箱11、控制器模块10、防水摄像机12、环境传感器阵列27、陀螺仪28、多轴机械臂30、机载双向无线电发射与接收器18与机械臂执行末端的搭载设备。机械臂是多轴的,在本实施方案中,多轴机器臂30为六轴机械臂,包括六个铰链接即机器臂关节31、32、33、34、35、36,其实现了机械臂在六个自由度的运动,其由机载计算机8通过控制器模块10控制。机械臂执行末端的搭载设备包括防水摄像机12、位置传感器13、力学传感器14、相控阵换能器15、瑞利波与兰姆波激发与接收阵列组件16、水分散系统17。如图所示,本实施方案中,机器人共搭载了三台防水摄像机12,其中一台摄像机安置在移动机器前端的云台上,用于探索与监控管道内的情况,另外两台摄像机安置在机械臂的执行末端,它将向操作员提供图像,用于在管道1内精细作业检查管道内壁2的情况。摄像机组件一般是具有内置led光阵列的cctv摄像机。摄像机组件由控制器模块10激活并将视频信号传递到数据采集器9,经过数据采集器9整合处理,然后传输至机载计算机8。摄像机组件可以与自动光学焊接跟踪视觉软件一起使用,以通过根据需要调整机械臂30的位置来确保机械臂执行末端的瑞利波与兰姆波激发与接收阵列组件对待检测区域,尤其是环焊缝处3的精确对准。
[0020]
瑞利波与兰姆波激发与接收阵列组件16通过相控阵换能器15逐次按预先规定的延迟时间激发各个晶片(通常为压电陶瓷),所有晶片发射的瑞利波和兰姆波形成一个整体波阵面,能有效地控制所发射波阵面的形状和方向,实现波束的扫描、偏转和聚焦,为确定不连续性的形状、大小和方向提供出比单个或多个探头系统更大的能力。波在管壁表面以及内部传播,并由接收阵列组件接收,转化为电信号发送到数据采集器9,经过数据采集器9整理后,然后与其他传感器数据同步传输至机载计算机8,由其进行数据二次处理。通常瑞利波与兰姆波激发与接收阵列具有48至64个可以单独收发脉冲的微型独立电子元件,所部署的相控阵换能器根据检测要求定制,其通常使用30khz-5mhz的激发信号进行环焊扫频检查,相控阵换能器由机械臂放置在环焊缝处3的两侧,以便于焊缝的检查,并提高焊接缺陷的分辨率和检测效果。
[0021]
位置传感器13,通常是编码器,当机械臂执行末端贴近管壁把瑞利波与兰姆波发射与接收阵列压在待检测的管壁上时,位置传感器13也将被压在管道内壁上,机械臂执行末端在旋转期间通过位置传感器记录下其与管壁的相对位置;同时力学传感器14监测并记录由机械臂施加到管道内壁的力。机器人控制器模块10利用从位置传感器13与力学传感器14接收的信息用于调节机械臂30,用以在机械臂执行末端与管壁接触处获得相对恒定的力,形成闭环控制。
[0022]
车轮5由车载控制的电机6提供动力。在本实施方案中,机器人每个车轮都具有自身的驱动电机,电机由控制器模块进行控制,当左右两侧车轮转速不同时,可以实现机器人在管道内的转弯与侧移。电池组可以是可充电电池组,例如易于再充电的快速连接器(未示出),或者它可以是一次性电池组。电池组7既连接到驱动电机6,又连接到电子设备(例如控制器模块10、数据采集器9和机载计算机8),并为其提供电力。
[0023]
移动机器人的加压储水箱11,具有集成的压力调节器,并连接到瑞利波、兰姆波发射与接收阵列组件16,用以将所需压力的水供应到整体水分散系统17。水是发送和接收瑞利波与兰姆波信号的介质,使得在瑞利波、兰姆波发射与接收阵列组件16在工作时,其与内
管壁2之间没有任何空气。如此一来,激发信号有效的从激发阵列传递到了管壁上;同理,管壁上的信号也有效地传递到了接收阵列组件,传递过程中没有被空气阻断。
[0024]
结合图1与图2,本发明用于检测管道内部复杂系统状况的机载瑞利波与兰姆波机器人,其机械臂与机械臂执行末端的搭载设备都由控制器模块控制;控制器模块是下位机,实现对车轮电机、机械臂各关节电机以及水分散系统水泵电机的控制;机载计算机为上位机,其收集位置传感器13、力学传感器14与防水摄像机12的数据,其可以实时对数据进行分析,同时机载双向无线电发射与接收器18通过管道内双向无线链路20发射数据到管道口出双向无线电发射与接收器19,然后通过管道外双向无线链路21传送至工作站26,工作站的工作人员可以实时监控管道内的作业情况病通过组成的无线通道反向对机器人进行作业所需的控制操作。
[0025]
管道外工作站26包括,工作站的双向无线电发射与接收器22、解释工作站23、显示器24、视频监控站25。管道口处的双向无线电发射与接收器19接收到移动机器人发来的信号之后,通过管道外双向无线链路21传送信息到工作站的双向无线电发射与接收器22。解释工作站23配置互相独立的i/o硬件,用于处理与保存移动机器人发送来的各项数据,然后把数据进行可视化,显示在显示器24上,以供工作人员随时查看与分析。防水摄像机12所拍摄的视频也通过双线无线链路、双向无线电发射与接收器、解释工作站传输到了视频遥控站25,以供工作人员监控;同时,工作人员也通过视频遥控站25发送遥控指令反向传输至移动机器人,直接人为控制移动机器人的行驶和机械臂的运动。
[0026]
图标说明:1:管道2:管道内壁3:环焊缝处4:车体框架5:车轮6:电机7:电池组8:机载计算机9:数据采集器10:控制器模块11:加压储水箱12:防水摄像头13:位置传感器14:力学传感器15:相控阵换能器16:瑞利波与兰姆波激发与接收阵列组件17:水分散系统18:机载双向无线电发射与接收器19:管道口出双向无线电发射与接收器20:管道内双向无线链路
21:管道外双向无线链路22:工作站的双向无线电发射与接收器23:解释工作站24:显示器25:视频监控站26:工作站27:环境传感器阵列28:陀螺仪29:减震器30:多轴机械臂31-36:铰链接即机器人臂关节。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。