1.本发明属于二维激光雷达成像技术领域,具体涉及一种用于管道检测的二维激光雷达成像系统与方法。
背景技术:
2.目前基于二维激光扫描的管道内部成像过程中,通常采用的方法是接收同一帧激光信号的回波信号,并根据该回波信号构建二维图像来显示管道内部二维图像数据。现有技术中,通过二维激光雷达展示的轮廓成像是获取的每一次数据都进行展示,而在回波信号采集过程中,往往存在误差,使得某次数据会存在较大的偏差,如图2所示。
3.另外,现有的图像观测过程中,仅存在通过肉眼观察坐标系刻度值来粗略的得出任意两点之间的距离,并且对于二维图像数据无法实现数据回放。
技术实现要素:
4.本发明要解决的技术问题是:提供一种用于管道检测的二维激光雷达成像系统与方法,能够降低成像的误差率,提高数据准确度。
5.本发明为解决上述技术问题所采取的技术方案为:一种用于管道检测的二维激光雷达成像系统,本系统包括:数据采集模块,用于获取二维激光雷达扫描的管道内壁的每一帧图像数据;每一帧图像数据包括若干有效点的数据,所述的有效点为二维激光雷达扫描的管道内壁上的点;成像数据处理模块,用于对所采集的每相邻的n帧图像数据进行融合处理,将融合后的图像数据作为一次成像数据;定位点距离计算模块,用于对成像数据中的有效点进行坐标的计算,并在接收到2个定位点距离计算命令时,计算命令中的2个定位点对应的有效点之间的距离;存储模块,用于对采集的每一帧图像数据和每次成像数据进行保存;数据调用模块,用于在接收到回放命令时,根据回放命令调取存储模块中存储的对应数据;展示模块,用于展示成像数据和定位点之间的距离。
6.按上述系统,所述的有效点的数据包括该有效点与二维激光雷达中心点之间的距离和角度。
7.按上述系统,采集的图像数据中,一个像素代表的实际距离为标定值;成像数据中的一个像素,与采集的图像数据中的一个像素,代表的实际距离相等;所述的定位点距离计算模块具体用于通过坐标距离计算公式,对成像数据中的有效点进行坐标的计算。
8.按上述系统,所述的展示模块还用于输入2个定位点距离计算命令和/或回放命令。
9.按上述系统,所述的2个定位点距离计算命令,通过识别在展示的成像数据上点击两个定位点实现。
10.一种用于管道检测的二维激光雷达成像方法,本方法包括:获取二维激光雷达扫描的管道内壁的每一帧图像数据;每一帧图像数据包括若干有效点的数据,所述的有效点为二维激光雷达扫描的管道内壁上的点;对所采集的每相邻的n帧图像数据进行融合处理,将融合后的图像数据作为一次成像数据;对成像数据中的有效点进行坐标的计算,并在接收到2个定位点距离计算命令时,计算命令中的2个定位点对应的有效点之间的距离;对采集的每一帧图像数据和每次成像数据进行保存;在接收到回放命令时,根据回放命令调取存储模块中存储的对应数据;展示成像数据和定位点之间的距离。
11.按上述方法,所述的图像数据包括若干有效点的数据,每个有效点的数据包括该有效点与二维激光雷达中心点之间的距离和角度。
12.按上述方法,采集的图像数据中,一个像素代表的实际距离为标定值;成像数据中的一个像素,与采集的图像数据中的一个像素,代表的实际距离相等;所述的对成像数据中的有效点进行坐标的计算,具体为:通过坐标距离计算公式, 对成像数据中的有效点进行坐标的计算。
13.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述的方法的步骤。
14.一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述任一项所述的方法的步骤。
15.本发明的有益效果为:通过采用每相邻的n帧图像数据进行融合处理,将融合后的图像数据作为一次成像数据,从而提高其成像效果。此外,对成像数据通过鼠标点击实现计算任意两点之间的距离值,更好的避免了通过直接看坐标系的刻度值来得出距离值出现的误差。
附图说明
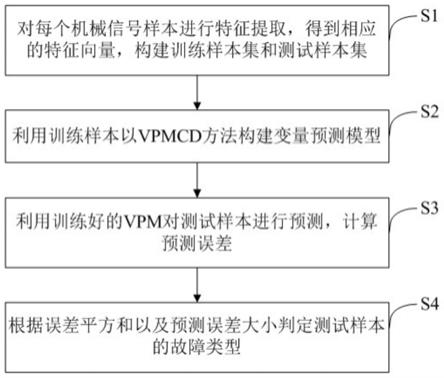
16.图1为本发明一实施例的方法流程图。
17.图2为现有技术的轮廓成像结果示意图。
18.图3为本发明一实施例的轮廓成像结果示意图。
19.图4为计算定位点距离展示图。
20.图5为回放显示图。
具体实施方式
21.下面结合具体实例和附图对本发明做进一步说明。
22.本发明提供一种用于管道检测的二维激光雷达成像系统,本系统包括:数据采集模块,用于获取二维激光雷达扫描的管道内壁的每一帧图像数据;每一帧图像数据包括若干有效点的数据,所述的有效点为二维激光雷达扫描的管道内壁上的点;每个有效点的数据包括该有效点与二维激光雷达中心点之间的距离和角度。
23.成像数据处理模块,用于对所采集的每相邻的n帧图像数据进行融合处理,将融合
后的图像数据作为一次成像数据,如图3所示。本实施例中,n=5,然后对每帧图像数据中采集到的有效点的数据取平均值,从而融合成一次成像数据。这样可以优化检测时遇到数据出现不准确时导致的成像差距很大的问题。作为扩展方案,在获得二维激光雷达检测数据时,对每一次检测数据进行筛选,判断每一次数据是否满足预设条件,若检测数据不满足预设条件,则将此次检测数据移除。
24.定位点距离计算模块,用于对成像数据中的有效点进行坐标的计算,并在接收到2个定位点距离计算命令时,计算命令中的2个定位点对应的有效点之间的距离。由于采集的图像数据中,一个像素代表的实际距离为标定值;成像数据中的一个像素,与采集的图像数据中的一个像素,代表的实际距离相等;所述的定位点距离计算模块具体用于通过坐标距离计算公式,对成像数据中的有效点进行坐标的计算。
25.所述的2个定位点距离计算命令,通过识别在展示的成像数据上点击两个定位点实现,如图4所示,对成像数据通过鼠标点击实现计算任意两点之间的距离值,更好的避免了通过直接看坐标系的刻度值来得出距离值出现的误差。
26.存储模块,用于对采集的每一帧图像数据和每次成像数据进行保存。把检测的每次有效数据都进行自定义文件格式的保存,可以通过文件读取的方式来实现检测过的数据实现回放。
27.数据调用模块,用于在接收到回放命令时,根据回放命令调取存储模块中存储的对应数据。
28.展示模块,用于展示成像数据和定位点之间的距离,还用于输入2个定位点距离计算命令和/或回放命令,如图5所示。
29.具体操作时,将二维激光雷达安设在管道检测机器人上,随着管道检测机器人沿管道行驶,以一定的扫描频率对管道内壁进行扫描。
30.一种用于管道检测的二维激光雷达成像方法,如图1所示,本方法包括:获取二维激光雷达扫描的管道内壁的每一帧图像数据。每一帧图像数据包括若干有效点的数据,所述的有效点为二维激光雷达扫描的管道内壁上的点。每个有效点的数据包括该有效点与二维激光雷达中心点之间的距离和角度。
31.对所采集的每相邻的n帧图像数据进行融合处理,将融合后的图像数据作为一次成像数据。
32.对成像数据中的有效点进行坐标的计算,并在接收到2个定位点距离计算命令时,计算命令中的2个定位点对应的有效点之间的距离。采集的图像数据中,一个像素代表的实际距离为标定值;成像数据中的一个像素,与采集的图像数据中的一个像素,代表的实际距离相等;所述的对成像数据中的有效点进行坐标的计算,具体为:通过坐标距离计算公式(勾股定理),对成像数据中的有效点进行坐标的计算。
33.对采集的每一帧图像数据和每次成像数据进行保存。
34.在接收到回放命令时,根据回放命令调取存储模块中存储的对应数据。
35.展示成像数据和定位点之间的距离。
36.本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述的方法的步骤。
37.一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理
器执行时实现上述任一项所述的方法的步骤。
38.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。