1.本技术属于智能家电技术领域,更具体地,涉及清洁机器人技术领域,例如,提供一种拖布清洁组件及清洁机器人基站。
背景技术:
2.清洁机器人是智能家用电器的一种,能够自动识别目标区域并自主规划清扫路径,凭借一定的人工智能自动在房间内完成地板清理工作。
3.目前,市面上的绝大多数清洁机器人通过采用刷扫和真空吸尘相结合方式,先将地面浮尘及杂物扫拢至底部尘盒吸口处,并通过机身内部产生的高负压将其吸入内置的集尘盒,完成地面清理的功能。
4.随着人们对于清洁功能需求的提高,逐渐出现一种集刷扫、吸尘及拖地为一体的智能清洁机器人,该机器人是在吸尘装置的后方设置拖地装置。拖地装置中的拖布在使用一段时间后需要更换,以方便下次有效清洁地面。
5.然而,拖布在擦拭一段时间地面后会吸附有较多的污水,如果不对污水进行清洁,则会对地面造成二次污染。
技术实现要素:
6.本技术的目的包括,例如,提供了一种拖布清洁组件及清洁机器人基站,以改善至少部分上述的问题。
7.本技术的实施例可以这样实现:
8.第一方面,提供一种拖布清洁组件,用于刮除拖布上的污物,包括动力件、传动组件以及刮污件。传动组件与动力件传动连接且包括传动齿轮;刮污件包括固定连接的刮污板和齿条,齿条沿第一方向延伸,以使刮污件安装于拖布上后,刮污板可以贴附于拖布的表面,齿条与传动齿轮啮合,且传动组件在动力件的驱动下能够带动刮污件沿第一方向往复运动。
9.进一步地,刮污件的数量为两个且分别为第一刮污件和第二刮污件,第一刮污件包括第一刮污板和第一齿条,第二刮污件包括第二刮污板和第二齿条,第一刮污板和第二刮污板平行设置,第一齿条的延伸方向与第二齿条的延伸方向相反,且第一齿条和第二齿条分别与传动齿轮啮合传动。
10.进一步地,第一齿条的数量为两个,两个第一齿条相对设置于第一刮污板沿宽度方向的两侧,且两个第一齿条的延伸方向相同;第二齿条的数量为两个,两个第二齿条相对设置于第二刮污板沿宽度方向的两侧,且两个第二齿条的延伸方向相同。
11.进一步地,传动组件还包括第一带轮和传动带,传动齿轮包括主动轮、第一从动轮、第二从动轮及第三从动轮,主动轮包括第二带轮和驱动轮,第二带轮与驱动轮同轴且固定连接,第一带轮连接于动力件的输出端,传动带同时套设于第一带轮和第二带轮,驱动轮分别与第一从动轮和第二从动轮啮合传动,第二从动轮与第三从动轮啮合传动,驱动轮和
第二从动轮分别与第一齿条啮合,第一从动轮和第三从动轮分别与第二齿条啮合。
12.进一步地,驱动轮和第二从动轮之间的中心距小于第一从动轮和第三从动轮之间的中心距,第一从动轮的厚度小于驱动轮和第一齿条的厚度之差,第三从动轮的厚度小于第二从动轮和第一齿条的厚度之差。
13.进一步地,传动组件还包括第一带轮和传动带,传动齿轮包括第二带轮和从动齿轮,第二带轮与从动齿轮同轴且固定连接,第一带轮连接于动力件的输出端,传动带同时套设于第一带轮和第二带轮,从动齿轮同时与第一齿条和第二齿条啮合,以使传动组件在动力件的驱动下带动从动齿轮转动,进而带动第一齿条和第二齿条相互靠近或者远离。
14.进一步地,刮污板包括刮污本体和凸设于刮污本体一侧的固定部,齿条与固定部连接,刮污本体的长度方向与第一方向垂直。
15.进一步地,刮污件还包括刮污条,刮污本体包括沿长度方向设置的嵌设部,嵌设部为背离固定部的一侧,刮污条固定连接于嵌设部。
16.进一步地,拖布清洁组件还包括导流板,刮污本体与固定部之间形成穿设槽,导流板穿设于穿设槽,以使齿条和刮污本体分别位于导流板的两侧。
17.第二方面,提供一种清洁机器人基站,包括机座、清洗组件以及拖布清洁组件。机座包括收容腔,清洗组件安装于机座,且包括喷水口,喷水口的朝向用于和待清洁拖布相对应。拖布清洁组件安装于机座的收容腔,拖布清洁组件的刮污件能够与待清洁拖布相适配,以使刮污件在传动组件的作用下,相对于待清洁拖布能够沿第一方向往复运动。
18.本技术实施例提供的拖布清洁组件,可以安装于清洁机器人的基站上。当清洁机器人在使用一段时间或者一段距离后,拖布吸附了大量的污物或污水。如果继续使用拖布进行拖地,会造成地面的二次污染。
19.因此,清洁机器人在工作完成后需要进行深度清洁,通过在基站中安装拖布清洁组件,使用拖布清洁组件中的刮污件可以去除拖布中的污物或污水。使用时,清洁机器人运行至基站位置,清洗组件向待清洁拖布冲水,同时刮污件在传动组件的传动下,相对于拖布沿第一方向往复运动。刮污件在运动过程中,可以将拖布中的污物或污水刮除下来,有利于快速深度清洁拖布,改善拖布对地面造成二次污染的现象。
附图说明
20.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
21.图1为本技术实施例提供的拖布清洁组件的结构示意图;
22.图2为本技术实施例提供的拖布清洁组件的分解示意图;
23.图3为图2中刮污件和传动组件配合后的结构示意图;
24.图4为图2中刮污件的分解示意图;
25.图5为图3中传动组件的结构示意图;
26.图6为本技术实施例提供的拖布清洁组件一结构中刮污件和传动组件的结构示意图;
27.图7为本技术实施例提供的拖布清洁组件另一结构中刮污件和传动组件的结构示意图;
28.图8为图7的分解示意图;
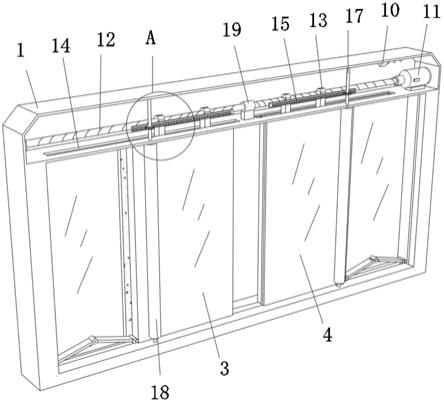
29.图9为本技术实施例提供的清洁机器人基站的结构示意图;
30.图10为清洁机器人基站的分解示意图。
31.图标:001-第一方向;100-拖布清洁组件;110-动力件;120-传动组件;121-传动齿轮;122-主动轮;123-第一从动轮;124-第二从动轮;125-第三从动轮;126-第一带轮;127-传动带;128-从动齿轮;130-刮污件;131-第一刮污件;1310-第一刮污板;1312-第一齿条;133-第二刮污件;1330-第二刮污板;1332-第二齿条;135-刮污板;1350-刮污本体;1352-固定部;1353-嵌设部;1354-齿条;1356-穿设槽;1358-刮污条;136-导流板;200-清洁机器人基站;210-机座;212-收容腔;220-清洗组件。
具体实施方式
32.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
33.需要说明的是,在不冲突的情况下,本技术的实施例中的特征可以相互结合。
34.随着科技的发展,智能家电越来越多的受到用户的欢迎。其中,清洁机器人作为一种能够自动识别目标区域,并自主规划清扫路径的智能家用电器。能够对房间进行自动清扫、吸尘及拖地的功能,代替用户进行房间清理。
35.目前,市场上的清洁机器人可以采用刷扫、吸尘及拖地相结合的方式,即先将地面浮尘及杂物扫拢至底部尘盒吸口处,通过机身内部产生的高负压将其吸入内置的集尘盒,再通过设置在机身底部的拖布或带拖布的滚筒,来实现拖地的功能,从而实现集刷扫、吸尘及拖地为一体的清洁方式。
36.其中,清洁机器人的拖地方式可以包括平板式结构、滚筒式结构及履带式结构。相对于平板式结构和滚筒式结构而言,履带式结构的拖地效果更好。履带式结构是指:在履带式转动组件上包覆拖布,拖布随履带式转动组件的转动而转动。在清洁机器人的行走过程中,拖布具有随机器人平行移动和随履带式转动组件转动的双重动作,且拖布在履带式转动组件的作用下与地面的接触面积增大,从而可以提高地面清理效果。
37.然而,当拖布在擦拭一段地面后会吸附大量的污物,包括污水。如果不对拖布进行处理或者清洗,继续使用拖地,会对地面造成二次污染。
38.基于上述问题,请参照图1,本技术实施例提供了一种拖布清洁组件100,该拖布清洁组件100用于安装在清洁机器人基站上,当清洁机器人工作完成后运行至基站位置,通过拖布清洁组件100来刮除拖布上的污物。
39.具体地,拖布清洁组件100可以包括动力件110、传动组件120以及刮污件130。
40.其中,传动组件120与动力件110传动连接,且传动组件120可以包括传动齿轮(图中未示出)。刮污件130可以包括固定连接的刮污板135和齿条1354,齿条1354沿第一方向001延伸。当拖布清洁组件安装于拖布上后,刮污板135正好可以贴设于拖布的表面,通过刮
污板135将拖布上的污物和污水刮除。
41.传动连接时,齿条1354与传动齿轮相啮合,传动组件120在动力件110的驱动下能够通过传动齿轮带动齿条1354沿第一方向001运动,进而齿条1354带动刮污板135沿第一方向001相对于拖布进行往复运动。且刮污板135在相对于拖布进行运动时,可以刮除拖布上的污物,挤出拖布中的污水,从而避免了拖布进行拖地时对地面造成二次污染。
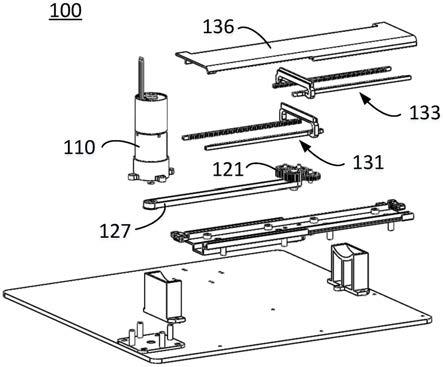
42.请参照图2,所示为拖布清洁组件100一结构的分解示意图。
43.具体地,刮污件130的数量为两个,两个刮污件130分别为第一刮污件131和第二刮污件133。安装时,第一刮污件131和第二刮污件133交错设置,方向相反。当传动齿轮121与齿条1354啮合传动且带动刮污件130沿第一方向001往复运动时,第一刮污件131和第二刮污件133相对靠近或者相对远离。
44.请参照图3,第一刮污件131包括第一刮污板1310和第一齿条1312,第一刮污板1310和第一齿条1312固定连接。第二刮污件133包括第二刮污板1330和第二齿条1332,第二刮污板1330和第二齿条1332固定连接。
45.安装完成后,第一刮污板1310和第二刮污板1330平行设置,第一齿条1312的延伸方向与第二齿条1332的延伸方向相反,且第一齿条1312和第二齿条1332分别与传动齿轮121啮合传动。以使传动齿轮121可以带动第一齿条1312和第二齿条1332朝相反的方向同时运动,当第一齿条1312和第二齿条1332相互靠近时,第一刮污板1310和第二刮污板1330相对靠近,直至贴合。当第一齿条1312和第二齿条1332相互远离时,第一刮污板1310和第二刮污板1330相对远离。
46.请参照图4,所示为刮污件130的结构示意图。
47.刮污件130可以包括刮污板135和齿条1354,齿条1354用于和传动组件120的传动齿轮121啮合传动,刮污板135用于和待清洁拖布配合,用于刮除拖布上的污物。其中,刮污板135可以包括刮污本体1350和凸设于刮污本体1350一侧的固定部1352,刮污本体1350包括沿长度方向的两端,刮污本体1350的两端可以均设置有固定部1352,且两端的固定部1352位于刮污本体1350的同一侧。齿条1354的数量为两个,两个齿条1354分别与两个固定部1352一一对应的连接,且连接后,齿条1354、固定部1352及刮污本体1350可以形成穿设槽1356。
48.为了使得刮污本体1350随齿条1354在沿第一方向001运动时,可以较好的刮除拖布上的污物。可选地,刮污本体1350的长度方向与第一方向001垂直,即刮污本体1350的长度方向与齿条1354的运动方向垂直。当齿条1354沿第一方向001往复运动时,刮污本体1350也可以沿第一方向001往复运动,且刮污本体1350相对于拖布在运动的过程中,可以将与刮污本体1350长度相对应的拖布区域进行污物刮除。
49.可选地,连接于同一刮污板135上的两个齿条1354平行设置,两个齿条1354上开设的齿牙相对设置。两个齿条1354的长度相同,与刮污板135的连接位置也相同,以使该刮污件130为一对称结构。当两个齿条1354分别与传动齿轮121啮合时,可以使得齿条1354沿第一方向001运动至最大化,与齿条1354固定连接的刮污板135沿第一方向001的运动距离最大。
50.为了使得刮污件130可以方便的对拖布进行刮擦,且不易损伤拖布。可选地,刮污件130还可以包括刮污条1358,刮污条1358可以采用塑料、泡沫等材质。
51.刮污本体1350包括沿长度方向开设的嵌设部1353,嵌设部1353为背离固定部1352的一侧,刮污条1358固定连接于嵌设部1353。当刮污件130为两个时,第一刮污件131上设置的刮污条1358可以和第二刮污件133上设置的刮污条1358相对。当该刮污件130在使用一段时间后,可以根据需求更换刮污条1358,更换方便,且有利于节省费用,降低成本。
52.请参照图5,所示为传动组件120的示意图。
53.具体地,传动组件120可以包括传动齿轮121、第一带轮126和传动带127。
54.其中,传动齿轮121可以包括主动轮122、第一从动轮123、第二从动轮124及第三从动轮125。主动轮122包括同轴且固定连接的第二带轮和驱动轮。
55.安装时,第一带轮126与动力件110的动力输出端固定连接,第二带轮与驱动轮同轴固定连接。传动带127同时套设于第一带轮126和第二带轮,以形成皮带轮传动。即动力件110通过皮带轮传动结构可以带动驱动轮进行转动。
56.驱动轮分别与第一从动轮123和第二从动轮124啮合传动,第二从动轮124与第三从动轮125啮合传动。驱动轮和第二从动轮124作为一组,可以和第一刮污件131啮合传动,第一从动轮123和第三从动轮125作为一组,可以和第二刮污件133啮合传动。
57.具体地,驱动轮和第一刮污件131的其中一个第一齿条1312啮合传动,第二从动轮124和第一刮污件131的另外一个第一齿条1312啮合传动。需要注意的是,要使得第一刮污件131上的两个第一齿条1312运动同步,则需要保证驱动轮和第二从动轮124的分度圆半径、齿数等参数均相同。当传动连接时,驱动轮的旋转方向与第二从动轮124的旋转方向相反,旋转速度相同。
58.同理,驱动轮与第一从动轮123啮合,驱动轮作为主动件可以带动第一从动轮123转动,且第一从动轮123的转动方向与驱动轮的转动方向相反。第二从动轮124与第三从动轮125啮合,第二从动轮124作为主动件可以带动第三从动轮125转动,且第二从动轮124的转动方向与第三从动轮125的转动方向相反。
59.第一从动轮123和第三从动轮125分别与第二刮污件133的第二齿条1332啮合传动。即:第一从动轮123和第二刮污件133的其中一个第二齿条1332啮合传动,第三从动轮125和第二刮污件133的另外一个第二齿条1332啮合传动。需要注意的是,要使得第二刮污件133上的两个第二齿条1332运动同步,则需要保证第一从动轮123和第三从动轮125的分度圆半径、齿数等参数均相同。当传动连接时,第一从动轮123的旋转方向与第三从动轮125的旋转方向相反,旋转速度相同。
60.为了避免驱动轮和第二从动轮124带动第一刮污件131运动,第一从动轮123和第三从动轮125带动第二刮污件133沿相反的方向运动的同时,第一齿条1312、第二齿条1332、第一从动轮123、第三从动轮125、第二从动轮124及驱动轮相互之间发生干涉,影响正常传动。
61.可选地,第一齿条1312的数量为两个,两个第一齿条1312相对设置于第一刮污板1310沿宽度方向的两侧,且两个第一齿条1312的延伸方向相同。第二齿条1332的数量为两个,两个第二齿条1332相对设置于第二刮污板1330沿宽度方向的两侧,且两个第二齿条1332的延伸方向相同。
62.可选地,请参照图6,可以将第一刮污件131上的两个第一齿条1312之间的距离设计相对近一些,将第二刮污件133上的两个第二齿条1332之间的距离设计相对远一些。同
时,将第一刮污件131上的两个第一齿条1312和第二刮污件133上的两个第二齿条1332分层设置。即第一刮污件131上的两个第一齿条1312位于第二刮污件133上的两个第二齿条1332的上方,且同时,第一刮污件131上的两个第一齿条1312位于第二刮污件133上的两个第二齿条1332的外侧。
63.与第一齿条1312、第二齿条1332相对应的,驱动轮和第二从动轮124之间的中心距小于第一从动轮123和第三从动轮125之间的中心距。且第一从动轮123的厚度小于驱动轮和第一齿条1312的厚度之差,第三从动轮125的厚度小于第二从动轮124和第一齿条1312的厚度之差。
64.可选地,传动带127也可以采用链条,第一带轮126、第二带轮及传动带127也可以设置为链条传动方式。本技术对于皮带轮传动或是链条传动不作限定,具体根据实际的环境空间和设计需求而定。
65.可选地,动力件110可以采用电机,电机包括动力输出轴。第一带轮126可以通过花键或者键与动力输出轴固定连接。
66.在可选的其他实施方式中,传动组件120还可以为其他结构。
67.请一并参照图7和图8,传动组件120可以包括传动齿轮121、第一带轮(图中未示出)及传动带127。
68.刮污件130包括固定连接的刮污板135和齿条1354,齿条1354数量为一个且固定连接于刮污板135的一侧,且齿条1354的延伸方向和刮污板135的延伸方向垂直。刮污件130的数量为两个分别为第一刮污件131和第二刮污件133,第一刮污件131上的齿条为第一齿条1312,第二刮污件133上的齿条为第二齿条1332。
69.其中,传动齿轮121可以包括第二带轮(图中未示出)和从动齿轮128,第二带轮与从动齿轮128同轴且固定连接。安装时,第一带轮(图中未示出)连接于动力件110的动力输出端,传动带127同时套设于第一带轮和第二带轮,以形成皮带轮传动。动力件110通过皮带轮传动可以带动从动齿轮128转动。
70.从动齿轮128同时与第一刮污件131的第一齿条1312和第二刮污件133的第二齿条1332啮合传动,当从动齿轮128沿一个方向(例如,顺时针方向)转动时,可以带动第一齿条1312和第二齿条1332同步相向运动,使得第一刮污板1310和第二刮污板1330相互靠近。当从动齿轮128沿反方向(例如,逆时针方向)转动时,可以带动第一齿条1312和第二齿条1332同步相背运动,使得第一刮污板1310和第二刮污板1330相互远离。
71.传动组件120在动力件110的驱动下,可以带动从动齿轮128转动,进而从动齿轮128带动第一齿条1312和第二齿条1332相互靠近或者远离,使得第一刮污板1310和第二刮污板1330相互靠近或者远离。
72.该拖布清洁组件100在将拖布上的污物或污水进行挤压清理的过程中,为了防止污水流入拖布清洁组件100的内部,对传动组件120和动力件110造成污染。
73.可选地,请继续参照图1,拖布清洁组件100还可以包括导流板136。
74.如图4,刮污本体1350、固定部1352及齿条1354之间可以形成穿设槽1356,导流板136穿设于穿设槽1356中,以使齿条1354和刮污本体1350分别位于导流板136的两侧。安装完成后,刮污本体1350位于导流板136的外侧,通过导流板136可以将传动组件120和齿条1354进行遮挡保护,防止污水流入,可以延长拖布清洁组件100的使用寿命。
75.本技术实施例提供的拖布清洁组件100,通过传动组件120将动力件110的动力传送给刮污件130,以使刮污件130可以沿第一方向001往复运动。由于刮污件130与拖布贴合设置,当刮污件130沿第一方向001运动时,可以刮除拖布上的污物或者污水,有利于快速清理拖布,避免拖布对地面造成二次污染。
76.请参照图9,本技术实施例还提供了一种清洁机器人基站200。
77.该清洁机器人基站200可以包括机座210、清洗组件(图中未示出)以及上述的拖布清洁组件100。
78.其中,请参照图10,机座210可以包括收容腔212,清洗组件220可以安装于机座210上,清洗组件220用于向待清洁的拖布进行喷水。因此,清洗组件220可以包括喷水口,喷水口的朝向正好和待清洁拖布相对应。拖布清洁组件100安装于机座210的收容腔212内,且拖布清洁组件100的刮污件130能够与待清洁拖布相适配。
79.刮污件130在传动组件120的作用下,可以相对于待清洁拖布沿第一方向001进行往复运动。
80.清洁拖布时,需要清洁机器人运行至基站的机座内,然后通过清洗组件和拖布清洁组件对拖布进行清洁。需要注意的是,当清洁机器人中的动力组件驱动拖布在转动的过程中,拖布清洁组件中的刮污件在传动组件的传动下,可以相对于拖布沿第一方向进行往复运动。
81.可以设置清洁机器人的动力组件的转速和转动方向,以使待清洁拖布每转动一定角度时,刮污件可以相对于拖布沿第一方向往复运动多次,从而有利于将拖布的每个部位刮除干净,实现深度清洁的目的。
82.本技术实施例提供的清洁机器人基站200,在机座210中设置清洗组件220和拖布清洁组件100。当清洁机器人在工作完成后,运动至清洁机器人基站处,且运动到机座的收容腔内。通过清洗组件向清洁机器人的拖布进行喷水,同时,拖布清洁组件中的刮污件130可以相对于拖布沿第一方向001进行往复运动,方便将拖布上的污物或污水刮除下来,提高清洁效果,减少对地面造成二次污染的概率,提升用户良好体验。
83.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。