1.本实用新型属于机器人技术领域,特别是涉及一种机器人。
背景技术:
2.随着科学技术的发展,机器人越来越广泛地应用于各个领域中。在机器人的应用过程中,通常会需要机器人移动以最终实现特定功能,比如实现自动配送、自动移动检测等功能,而在机器人的移动过程中,必然会遇到前方存在障碍物的情况,此时需要及时确定障碍物的位置并进行自动避障。现有技术中,机器人在运动过程中往往存在较大幅度的感知盲区,如此,在障碍物较为密集,或障碍物(比如行人)可移动的状态下,往往不能及时准确进行避障而导致机器人与障碍物的碰撞,如此,不仅影响了机器人功能实现的效果,降低机器人的使用体验,甚至可能发生安全事故。
技术实现要素:
3.本实用新型针对现有技术中的机器人存在较大幅度的感知盲区所导致的不能及时准确进行避障的问题,提供了一种机器人。
4.鉴于以上技术问题,本实用新型实施例提供一种机器人,包括所述机器人包括底盘、设置于所述底盘上的机器人本体、朝斜上方设置于所述底盘上的第一相机以及朝斜下方设置于所述机器人本体上的第二相机;
5.所述第一相机的探测视角的第一中心线与所述第一中心线所在的第一铅垂面中的第一参照线呈第一预设夹角设置;所述第一参照线与自所述机器人本体指向所述底盘的机器人长度方向平行设置;
6.所述第二相机的探测视角的第二中心线与所述第二中心线所在的第二铅垂面中的第二参照线呈第二预设夹角设置;所述第二参照线与所述机器人长度方向平行设置。
7.可选地,所述述第一相机和所述第二相机之间的连线与所述机器人长度方向平行,所述机器人还包括位于所述第一相机和所述第二相机之间的且设置于所述机器人本体上的显示屏。
8.可选地,所述第一相机和所述第二相机之间的距离为700mm~800mm。
9.可选地,第一相机和所述第二相机之间的距离为750mm;所述第一相机的安装高度为150mm,所述第二相机的安装高度为900mm。
10.可选地,所述第一相机和所述第二相机均为rgbd摄像头。
11.可选地,所述第一预设夹角为30度~60度。
12.可选地,所述第一预设夹角为45度。
13.可选地,所述第二预设夹角为25度~50度。
14.可选地,所述第二预设夹角为35.4度。
15.可选地,所述第一相机的水平视场角为70度~100度,垂直视场角为45度~70度;所述第二相机的水平视场角为70度~100度,垂直视场角为45度~70度。
16.本实用新型中,机器人包括底盘、设置于所述底盘上的机器人本体、朝斜上方设置于所述底盘上的第一相机以及朝斜下方设置于所述机器人本体上的第二相机;所述第一相机的探测视角的第一中心线与所述第一中心线所在的第一铅垂面中的第一参照线呈第一预设夹角设置;所述第一参照线与自所述机器人本体指向所述底盘的机器人长度方向平行设置;所述第二相机的探测视角的第二中心线与所述第二中心线所在的第二铅垂面中的第二参照线呈第二预设夹角设置;所述第二参照线与所述机器人长度方向平行设置。
17.本实用新型中,机器人通过朝斜上方安装在机器人底盘的第一相机,以及朝斜下方安装在所述机器人本体上的第二相机,进行避障检测,此时,第一相机主要用于检测三维悬空障碍物,为三维避障功能服务;而第二相机主要用于检测低矮障碍物及地面低洼区域,为三维避障,防压脚,防跌落功能服务,如此,第一相机和第二相机实现了协同监测,缩减了感知盲区的范围,实现了机器人感知范围的最优化;且本实用新型的机器人仅使用了两个相机即可在机械结构限制的前提下,最小化机器人上方盲区和下方盲区,进而有效保护机器人头部,以避免与悬空障碍物碰撞,同时也可以有效检测地面近距离障碍物,为机器人避让障碍物提供了一个较宽的缓冲区;并且,基于机器人的大小和两个相机(第一相机和第二相机)的可感知监测范围,可以使得机器人达到最优的检测效果,有效保障了机器人运行安全和行人(或其他障碍物)的安全。
附图说明
18.下面结合附图和实施例对本实用新型进一步说明。
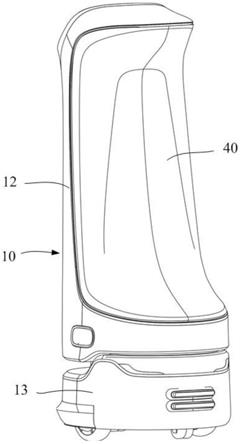
19.图1是本实用新型一实施例提供的机器人的结构及探测视角示意图。
20.说明书中的附图标记如下:
21.1、机器人本体;11、第二相机;2、底盘;21、第一相机;3、第一铅垂面;31、第一中心线;4、第二铅垂面;41、第二中心线;α、第一预设夹角;β、第二预设夹角。
具体实施方式
22.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
23.需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本实用新型的限制。
24.如图1所示,本实用新型一实施提供的一种机器人,所述机器人包括底盘2、设置于所述底盘2上的机器人本体1、朝斜上方设置于所述底盘2上的第一相机21以及朝斜下方设置于所述机器人本体1上的第二相机11;作为优选,第一相机21朝向斜上方安装在机器人本体1的前方,且第一相机21的探测视角朝向斜上方,第二相机11朝向斜下方安装在机器人本体1的前方,且第二相机11的探测视角朝向斜下方。其中,机器人本体1和底盘2的连接方式可以根据需求设定,比如卡接、螺钉连接或焊接等均可,只要能实现两者的稳定连接即可。可理解地,机器人本体1的形状可以根据需求设定,比如,其可以为柱体,柱体的支撑体上的
大部分外表面上呈曲面设计,如此,不仅提升了其外形美观程度,且在与外界物体或人接触时,不会对其产生损伤。
25.所述第一相机11的探测视角(也即第一相机21在图1中示出的仰视角)的第一中心线31与所述第一中心线31所在的第一铅垂面3中的第一参照线(图未示)呈第一预设夹角α设置;所述第一参照线与自所述机器人本体1指向所述底盘2的机器人长度方向f平行设置;其中,所述机器人长度方向f是指在机器人处于直立状态时,与铅垂线平行的方向,且所述机器人长度方向f不仅可以自所述机器人本体1指向所述底盘2,亦可认为是由底盘2指向机器人本体1。
26.所述第二相机11的探测视角(也即第二相机11在图1中示出的俯视角)的第二中心线41与所述第二中心线41所在的第二铅垂面4中的所述第二参照线(图未示)呈第二预设夹角β设置;所述第二参照线与所述机器人长度方向f平行设置。
27.在本实用新型中,机器人本体1前方是指机器人本体1上在正常的移动过程中朝向预设行进路线前进的方向。无论是朝斜上方的第一相机21还朝斜下方的第二相机,均是机器人本体1在正常状态(如正常运行或者站立状态下)下的方位。可理解地,上述第一相机21和第二相机11可以安装在机器人本体1前方的特定位置,比如,机器人本体1前方的正中间位置点,或者以正中间位置点为中心并向两侧延伸的预设可调范围内设定的任意一个位置点等。如此,第一相机21主要用于检测位于机器人本体1前方的三维悬空障碍物,为三维避障功能服务;而第一相机21主要用于检测位于机器人本体1前方的低矮障碍物及地面低洼区域,为三维避障,防压脚,防跌落功能服务。
28.作为优选,所述第一预设夹角α为30度~60度;具体地,在图1中所示,所述第一预设夹角α为45度,但第一预设夹角α亦可以为除45度之外的其他角度,比如30度、35度、50度、55度等亦可。所述第二中心线41与水平线之间呈第二预设夹角β设置;作为优选,所述第二预设夹角β为25度~50度。具体地,在图1中所示,所述第二预设夹角β为35.4度。但第二预设夹角β亦可以为除35.4度之外的其他角度,比如30度、35度、40度、45度等亦可。在本实用新型的上述实施例中,机器人通过朝斜上方安装在所述机器人底盘2的第一相机21,以及朝斜下方安装在所述机器人本体1上的第二相机11,进行避障检测,此时,第一相机21主要用于检测三维悬空障碍物,为三维避障功能服务;而第二相机11主要用于检测低矮障碍物及地面低洼区域,为三维避障,防压脚,防跌落功能服务,如此,第一相机21和第二相机11实现了协同监测,缩减了感知盲区的范围,实现了机器人感知范围的最优化;且本实用新型的机器人仅使用了两个相机即可在机械结构限制的前提下,最小化机器人上方盲区和下方盲区,进而有效保护机器人头部,以避免与悬空障碍物碰撞,同时也可以有效检测地面近距离障碍物,为机器人避让障碍物提供了一个较宽的缓冲区;并且,基于机器人的大小和两个相机(第一相机21和第二相机11)的可感知监测范围,可以使得机器人达到最优的检测效果,有效保障了机器人运行安全和行人(或其他障碍物)的安全。
29.进一步地,所述第一相机21和所述第二相机11的中心点连线与所述机器人长度方向f平行,所述机器人还包括位于所述第一相机21和所述第二相机11之间的且设置于所述机器人本体1上的显示屏(图未示)。也即,在机器人处于直立状态时,所述第二相机11位于所述第一相机21的正上方,此时,第一相机21与第二相机11设置在同一铅垂线上,第一相机21可以以该铅垂线为中心检测三维悬空障碍物,而第二相机11也同样以该铅垂线为中心来
检测低矮障碍物及地面低洼区域,如此,第一相机21和第二相机11的探测视角的协同性能更好。
30.可理解地,所述第一相机21与所述第二相机11之间的距离可以根据需求进行设定。作为优选,所述第一相机21和所述第二相机11之间的距离为700mm~800mm。在上述距离内,所述第一相机21与所述第二相机11可以协同监测达到更好的检测效果。进一步地,所述第一相机21和所述第二相机11之间的距离为750mm,在一具体的实施例中,所述第一相机21的安装高度为150mm,所述第二相机11的安装高度为900mm。上述预设距离和安装高度的设置,可以合理利用第一相机21和第二相机11达到最优感知范围。
31.作为优选,所述第一相机21和所述第二相机11均为rgbd摄像头(深度图像摄像头)。在该实施例中,第一相机21和第二相机11用于采集图像颜色信息等,进而使得机器人可以根据采集到的上述信息进行定位或确定并避开障碍物。
32.进一步地,所述第一相机的水平视场角为70度~100度,垂直视场角为45度~70度;所述第二相机的水平视场角为70度~100度,垂直视场角为45度~70度。在一具体实施例中,所述第一相机21的水平视场角为85度,垂直视场角为58度。可选地,所述第二相机11的水平视场角为85度,垂直视场角为58度。也即,上述实施例中的第一相机21和第二相机11的视场角较大,可以提升监测效果,进而更好地实现机器人的三维避障功能。
33.在如图1所示的机器人中,所述第一相机21和所述第二相机11之间的距离为750mm,所述第一相机21的安装高度为150mm,所述第二相机11的安装高度为900mm;所述第一预设夹角为45度;所述第二预设夹角为35.4度;所述第一相机21的水平视场角为85度,垂直视场角为58度;所述第二相机11的水平视场角为85度,垂直视场角为58度。此时,机器人的上方盲区仅为0.15米左右,可以有效保护机器人头部,避免机器人与悬空障碍物碰撞;下方盲区也很小,仅为0.1米,可以有效检测地面近距离障碍物,最远可检测2米左右(比如2088.43mm)的障碍物,使得机器人可以合理利用两个相机实现了在最优感知范围内进行障碍物检测。同时,图1中所示的机器人前方0.15米~1.2米左右的区域完全在第一相机21和第二相机11的感知范围内,为机器人避让障碍物提供了一个较宽的缓冲区,且该感知范围内两个相机的检测精度理想,有利于行人的检测。
34.以上仅为本实用新型的部分实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。