1.本实用新型涉及花生仁真空包装技术领域,具体为花生仁自动包装整形抽空设备。
背景技术:
2.花生仁是指去掉花生壳的那部分,事实上是花生的种子,整个的花生叫做果实,荚果。也叫做花生米又名落花生、地果、唐人豆。花生长于滋养补益,可延年益寿,所以民间又称“长生果”,并且和黄豆一样被誉为“植物肉”、“素中之荤”。花生的营养价值比粮食类高,可与鸡蛋媲美,花生仁在完成产品挑选进入最后包装的环节,由电子秤称重客户要求的重量,进入放入整形模板的包装袋,抽空设备抽出袋内空气,压口机自动加垫压好袋口,移出码垛。
3.目前,市面上现有的花生仁真空包装存在以下几点不足:
4.1.从前的产品包装过程是人工进行称重,在产量大的时候,人工操作时间段,存在计量不精确的情况;
5.2.同时,想计量精确又存在产量上不去的缺点,后面的缝口和抽空都是由人工分别操作,劳动强度大,效率不高,加工成本高。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本实用新型提供了花生仁自动包装整形抽空设备,解决了从前的产品包装过程是人工进行称重,在产量大的时候,人工操作时间段,存在计量不精确的情况;同时,想计量精确又存在产量上不去的缺点,后面的缝口和抽空都是由人工分别操作,劳动强度大,效率不高,加工成本高的问题。
8.(二)技术方案
9.为实现以上目的,本实用新型通过以下技术方案予以实现:花生仁自动包装整形抽空设备,包括装置主体,所述装置主体包括输送架、第一固定装置、第二固定装置以及抽真空设备,所述输送架的一侧通过焊接的方式连接有支架,所述支架的顶部两侧均通过螺栓连接支撑板的底部,所述支撑板的顶部固定安装有抽真空设备,所述抽真空设备包括底板,所述底板的底部通过螺栓连接支撑板的顶部,所述底板的顶部通过嵌入的方式活动连接有两组电动推杆,两组所述电动推杆的端部一侧通过焊接的方式连接连接杆的两端,所述连接杆的外壁一侧套接有真空泵,所述真空泵的一侧固定连接有真空管,两组所述电动推杆的外壁一侧固定安装有移动块,所述移动块位于所述底板的上方,所述移动块的顶部通过螺栓连接有电动转块,所述电动转块的中部固定连接有第二推杆,所述第二推杆固定连接真空管外壁一侧,所述电动转块的端部一侧固定安装至夹块的一侧,所述夹块位于所述移动块的上方,所述夹块的一侧固定连接有夹板,所述移动块的顶部一侧通过嵌入的方式固定连接有夹片,所述夹板位于所述夹块的下方。
10.优选的,所述输送架包括传输带、第一电机以及转轴,所述输送架的顶部侧板内部活动连接有两组转轴,两组所述转轴的外壁套接有传输带,所述第一电机的驱动端贯穿至输送架侧板的内部,且与所述转轴固定连接。
11.优选的,所述输送架的侧板之间固定连接有称重传感器,所述称重传感器位于所述传输带的内部,所述称重传感器电性连接称重显示器,所述称重显示器的背部通过螺栓连接所述支架一侧。
12.优选的,所述输送架的一侧通过螺栓固定连接固定板的一侧,所述固定板的一侧活动连接有第一固定装置,所述第一固定装置包括移动杆、第二电机、第一推杆、连接板以及卡块,所述移动杆贯穿连接连接板,所述移动杆共设有四组,四组所述移动杆的端部一侧分别连接连接板的四周,四组所述移动杆之间设有两组第一推杆。
13.优选的,两组所述第一推杆的端部一侧固定连接至连接板的一侧,两组所述第一推杆的另一侧端部固定连接至第二电机的驱动端,所述第一电机的一侧通过螺栓连接至固定板的一侧,所述连接板的另一侧固定连接有卡块。
14.优选的,所述第二固定装置的一侧安装至固定箱的一侧,所述固定箱位于所述支架的内部,所述第二固定装置与所述第一固定装置呈镜像分布形式。
15.(三)有益效果
16.本实用新型提供了花生仁自动包装整形抽空设备。具备以下有益效果:
17.(1)、该花生仁自动包装整形抽空设备,通过各个部件的互相组合,该装置主体具有效率高,节省人工,减少劳动强度,降低生产成本的优点,有效的解决了从前的产品包装过程是人工进行称重,在产量大的时候,人工操作时间段,存在计量不精确的情况的问题,同时,通过抽真空设备的设置,可同时进行包装袋的抽真空及封口工作,而称重传感器的设置,具有计量准确快速、均匀的优点,有效的解决了想计量精确又存在产量上不去的缺点,后面的缝口和抽空都是由人工分别操作的问题。
18.(2)、该花生仁自动包装整形抽空设备,通过第一固定装置与第二固定装置的设置,其中中的卡块贴合在一起,大大的方便花生仁在抽真空中定型,无需工人手动定型,减低了工人的工作负担。
附图说明
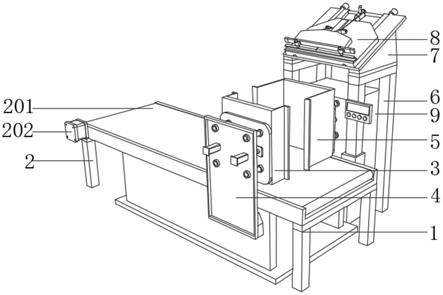
19.图1为本实用新型整体的结构示意图;
20.图2为本实用新型第一固定装置的结构示意图;
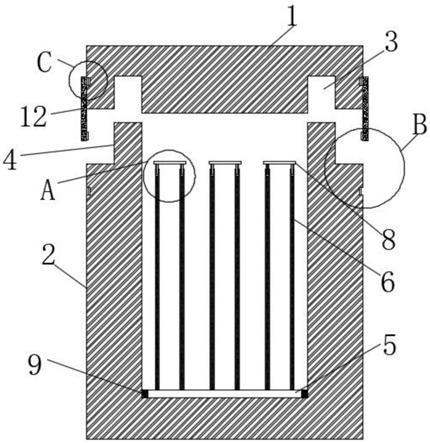
21.图3为本实用新型抽真空设备的结构示意图;
22.图4为本实用新型称重传感器的结构示意图。
23.图中,1-装置主体、2-输送架、201-传输带、202-第一电机、203
‑ꢀ
转轴、3-第一固定装置、301-移动杆、302-第二电机、303-第一推杆、304-连接板、305-卡块、4-固定板、5-第二固定装置、6-支架、7
‑ꢀ
支撑板、8-抽真空设备、801-底板、802-电动推杆、803-连接杆、804
‑ꢀ
真空泵、805-真空管、806-移动块、807-电动转块、808-夹块、809
‑ꢀ
夹板、810-夹片、811-第二推杆、9-固定箱、10-称重显示器、101
‑ꢀ
称重传感器。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1-4,本实用新型实施例提供一种技术方案:花生仁自动包装整形抽空设备,包括装置主体1,所述装置主体1包括输送架 2、第一固定装置3、第二固定装置5以及抽真空设备8,所述输送架 2的一侧通过焊接的方式连接有支架6,所述支架6的顶部两侧均通过螺栓连接支撑板7的底部,所述支撑板7的顶部固定安装有抽真空设备8,所述抽真空设备8包括底板801,所述底板801的底部通过螺栓连接支撑板7的顶部,所述底板801的顶部通过嵌入的方式活动连接有两组电动推杆802,两组所述电动推杆802的端部一侧通过焊接的方式连接连接杆803的两端,所述连接杆803的外壁一侧套接有真空泵804,所述真空泵804的一侧固定连接有真空管805,两组所述电动推杆802的外壁一侧固定安装有移动块806,所述移动块806 位于所述底板801的上方,所述移动块806的顶部通过螺栓连接有电动转块807,所述电动转块807的中部固定连接有第二推杆811,所述第二推杆811固定连接真空管805外壁一侧,所述电动转块807的端部一侧固定安装至夹块808的一侧,所述夹块808位于所述移动块 806的上方,所述夹块808的一侧固定连接有夹板809,所述移动块 806的顶部一侧通过嵌入的方式固定连接有夹片810,所述夹板809 位于所述夹块808的下方。
26.在本实施例中,使用时,通过两组电动推杆802带动移动块806 向下移动,直至花生仁的包装袋处,之后通过电动转块807将夹块 808下压,下压的同时,第一推杆303带动真空管805向前移动,使真空管805的端部伸入至包装袋的内部,之后通过夹板809与夹片 810夹住包装带的封口处,此时,真空泵804开始启用,通过真空管 805将包装袋内的空气吸出,空气吸出完毕后,通过第一推杆303将真空管805回收至初始状态,之后夹板809与夹片810开始进行封口,可同时进行抽真空与封口工作。
27.所述输送架2包括传输带201、第一电机202以及转轴203,所述输送架2的顶部侧板内部活动连接有两组转轴203,两组所述转轴 203的外壁套接有传输带201,所述第一电机202的驱动端贯穿至输送架2侧板的内部,且与所述转轴203固定连接,所述输送架2的侧板之间固定连接有称重传感器101,所述称重传感器101位于所述传输带201的内部,所述称重传感器101电性连接称重显示器10,所述称重显示器10的背部通过螺栓连接所述支架6一侧。
28.在本实施例中,通过第一电机202带动转轴203的转动,可以使传输带201进行转动,从而将真空包装后的花生仁移动至指定位置,而内部所设置的称重传感器101在进行花生仁真空包装时,因重力下沉,可实时测量花生仁的重量,并反馈至称重显示器10上。
29.所述输送架2的一侧通过螺栓固定连接固定板4的一侧,所述固定板4的一侧活动连接有第一固定装置3,所述第一固定装置3包括移动杆301、第二电机302、第一推杆303、连接板304以及卡块305,所述移动杆301贯穿连接连接板304,所述移动杆301共设有四组,四组所述移动杆301的端部一侧分别连接连接板304的四周,四组所述移动杆301之间设有两组第一推杆303,两组所述第一推杆303的端部一侧固定连接至连接板304的一侧,两组所述第一推杆303的另一侧端部固定连接至第二电机302的驱动端,所述第一电机202的一侧通
过螺栓连接至固定板4的一侧,所述连接板304的另一侧固定连接有卡块305,所述第二固定装置5的一侧安装至固定箱9的一侧,所述固定箱9位于所述支架6的内部,所述第二固定装置5与所述第一固定装置3呈镜像分布形式。
30.在本实施例中,使用时,第一固定装置3与第二固定装置5,通过第二电机302的启用带动第二推杆811进行移动,从而使连接板 304所连的卡块305同时进行移动,同时,所连接的移动杆301在移动的过程中做匀速移动,从而使第一固定装置3与第二固定装置5中的卡块305贴合在一起,从而方便花生仁在抽真空中定型。
31.需要说明的是,该花生仁自动包装整形抽空设备中的第一电机 202与第二电机302分别为ye2和y2型号,使用时,第一固定装置3 与第二固定装置5,通过第二电机302的启用带动第二推杆811进行移动,从而使连接板304所连的卡块305同时进行移动,同时,所连接的移动杆301在移动的过程中做匀速移动,从而使第一固定装置3 与第二固定装置5中的卡块305贴合在一起,将包装袋放置在其上方,此时,花生仁进入包装袋内后,因重力使包装袋落入至卡块305中,之后,通过两组电动推杆802带动移动块806向下移动,直至花生仁的包装袋处,之后通过电动转块807将夹块808下压,下压的同时,第一推杆303带动真空管805向前移动,使真空管805的端部伸入至包装袋的内部,之后通过夹板809与夹片810夹住包装带的封口处,此时,真空泵804开始启用,通过真空管805将包装袋内的空气吸出,空气吸出完毕后,通过第一推杆303将真空管805回收至初始状态,之后夹板809与夹片810开始进行封口,同时,传输带201内部所设置的称重传感器101在进行花生仁真空封口时,因重力下沉,可实时测量花生仁的重量,并反馈至称重显示器10上,工人可随时观察花生仁的重量,之后第一固定装置3与第二固定装置5通过第二电机 302恢复至初始状态,最终,通过第一电机202带动转轴203的转动,可以使传输带201进行转动,从而将真空包装后的花生仁移动至指定位置,以完成花生仁自动包装整形抽真空工作。
32.本实用新型的1-装置主体、2-输送架、201-传输带、202-第一电机、203-转轴、3-第一固定装置、301-移动杆、302-第二电机、303
‑ꢀ
第一推杆、304-连接板、305-卡块、4-固定板、5-第二固定装置、6
‑ꢀ
支架、7-支撑板、8-抽真空设备、801-底板、802-电动推杆、803
‑ꢀ
连接杆、804-真空泵、805-真空管、806-移动块、807-电动转块、808
‑ꢀ
夹块、809-夹板、810-夹片、811-第二推杆、9-固定箱、10-称重显示器、101-称重传感器,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知,本实用新型解决了从前的产品包装过程是人工进行称重,在产量大的时候,人工操作时间段,存在计量不精确的情况;同时,想计量精确又存在产量上不去的缺点,后面的缝口和抽空都是由人工分别操作,劳动强度大,效率不高,加工成本高的问题,本实用新型通过上述部件的互相组合,该装置主体具有效率高,节省人工,减少劳动强度,降低生产成本的优点。
33.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利
要求。
34.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。