1.本实用新型涉及作业机械技术领域,尤其涉及一种作业机械的总线网络架构及作业机械。
背景技术:
2.随着作业机械的功能的丰富,总线通信方式在作业机械上被越来越多地使用。以can(控制器局域网络,controller area network)总线为例,旋钮开关、按键面板、中控屏、自动空调、adas(高级驾驶辅助系统,advanced driving assistance system)的控制器、一键启动按钮、esc(电子稳定控制,electronic stabilitycontrol)系统的控制器等均作为总线通信节点接入can总线,导致can网络架构中的节点越来越多,数据量也越来越大,can总线的负载率变大,可靠性降低。并且,各种类型的报文均在一条总线上传输,存在安全隐患。
3.为了解决传统的一路can总线的网络架构的上述不足,现有技术是将整车can网络分为多路can总线(例如动力can总线、车身can总线和信息can总线等),通过增加网关,由网关负责进行各路can总线之间的交互。
4.但增加网关的方式会导致结构复杂,不利于维护及变更,并且带来成本的增加,成本较高。
技术实现要素:
5.本实用新型提供一种作业机械的总线网络架构及作业机械,用以解决现有技术中结构复杂的缺陷,实现更简单的通信网络架构。
6.本实用新型提供一种作业机械的总线网络架构,包括:不止一路通信总线和仪表;
7.各路所述通信总线对应的目标属性不同;每一路所述通信总线与所述仪表连接;每一路所述通信总线上接入至少一个总线通信节点;
8.所述仪表,用于转发目标报文。
9.根据本实用新型提供的一种作业机械的总线网络架构,所述目标报文为第一总线通信节点向第二总线通信节点发送的报文;第一总线通信节点,为第一通信总线上的总线通信节点;第二总线通信节点,为第二通信总线上的总线通信节点。
10.根据本实用新型提供的一种作业机械的总线网络架构,所述目标属性包括通信安全等级、功能类型和升级属性。
11.根据本实用新型提供的一种作业机械的总线网络架构,至少两路所述通信总线的波特率不同。
12.根据本实用新型提供的一种作业机械的总线网络架构,各路所述通信总线均为can总线。
13.根据本实用新型提供的一种作业机械的总线网络架构,至少一路所述通信总线为can总线,至少一路所述通信总线为lin总线。
14.根据本实用新型提供的一种作业机械的总线网络架构,至少一路所述通信总线为can总线,至少一路所述通信总线为most总线。
15.根据本实用新型提供的一种作业机械的总线网络架构,至少一路所述通信总线为flexray总线。
16.本实用新型还提供一种作业机械,包括:上述任一种所述作业机械的总线网络架构。
17.根据本实用新型提供的一种作业机械,所述作业机械包括起重机。
18.本实用新型提供的作业机械的总线网络架构及作业机械,通过将目标属性不同的至少两路通信总线均与仪表连接,由仪表进行任意两路通信总线之间的交互,能降低每一路通信总线的负载率,能提高通信的稳定性,各路通信总线基于不同的目标属性传输不同的报文,能提高通信的安全性,由于不需要额外增加网关,总线网络架构的结构更简单,更有利于维护及变更,成本更低。
附图说明
19.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
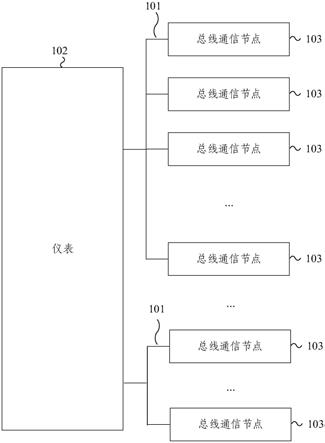
20.图1是本实用新型提供的作业机械的总线网络架构的结构示意图之一;
21.图2是本实用新型提供的作业机械的总线网络架构的结构示意图之二。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.在本实用新型实施例的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,且不涉及顺序。
24.在本实用新型实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型实施例中的具体含义。
25.下面结合图1至图2描述本实用新型提供的作业机械的总线网络架构及作业机械。
26.图1是本实用新型提供的作业机械的总线网络架构的结构示意图之一。下面结合图1描述本技术实施例的作业机械的总线网络架构。如图1所示,该作业机械的总线网络架构包括:不止一路通信总线101和仪表102。
27.具体地,该作业机械的总线网络架构可以由至少两路通信总线101和仪表102等构成。
28.该总线网络架构实际包括的通信总线101的路数可以根据实际需求确定。本实用新型实施例对该作业机械的总线网络架构包括的通信总线101的路数不进行具体限定。
29.优选地,该作业机械的总线网络架构包括2至5路通信总线101。
30.仪表102可以为该作业机械的某一个仪表,支持总线通信功能。
31.各路通信总线101对应的目标属性不同;每一路通信总线101与仪表102连接;每一路通信总线101上接入至少一个总线通信节点103。
32.具体地,总线通信节点103可以包括作业机械中的各种显示设备、控制器、传感器和人机交互设备等装置。
33.根据整个作业机械上各总线通信节点的目标属性,将目标属性相同的各总线通信节点103作为一组节点。可以理解的是,一组节点包括至少一个总线通信节点103。
34.需要说明的是,在对总线通信节点进行分组的过程中,还可以考虑每个总线通信节点传输的报文的数量,不将传输的报文的数量较大的多个总线通信节点划分至同一组节点中。
35.一组节点,对应唯一一路通信总线101;一路通信总线101,应唯一一组节点。可以理解的是,总线通信节点的组数与该作业机械的总线网络架构包括的通信总线101的路数相同。
36.对于每一路通信总线101,该路通信总线101对应的一组节点中的各总线通信节点103均接入该路通信总线101,而不接入其他路通信总线101。通信总线101对应的目标属性,为接入该路通信总线101的总线通信节点103的目标属性。
37.可选地,目标属性,可以为总线通信节点103的安全性、功能类型或可升级性等方面的属性。
38.仪表102,用于转发目标报文。
39.具体地,仪表102分别与每一路通信总线101连接,作为各路通信总线101之间的桥。
40.发送目标报文的总线通信节点接入一路通信总线101,接收目标报文的总线通信节点接入另一路通信总线101。仪表102支持总线通信功能,可以用于任意两路通信总线101之间的交互。
41.本实用新型实施例通过将目标属性不同的至少两路通信总线均与仪表连接,由仪表进行任意两路通信总线之间的交互,能降低每一路通信总线的负载率,能提高通信的稳定性,各路通信总线基于不同的目标属性传输不同的报文,能提高通信的安全性,由于不需要额外增加网关,总线网络架构的结构更简单,更有利于维护及变更,成本更低。
42.基于上述任一实施例的内容,目标报文为第一总线通信节点向第二总线通信节点发送的报文;第一总线通信节点,为第一通信总线上的总线通信节点;第二总线通信节点,
为第二通信总线上的总线通信节点。
43.具体地,仪表102可以转发第一通信总线上的第一总线通信节点向第二通信总线上的第二总线通信节点发送的目标报文。
44.第一通信总线和第二通信总线,为上述各路通信总线101中的两路通信总线。第一通信总线,可以为上述各路通信总线101中的任一路通信总线101。第二通信总线,可以为上述各路通信总线101中与第一通信总线不同的任一路通信总线101。第一总线通信节点,可以为第一通信总线上的任一总线通信节点。第二总线通信节点,可以为第二通信总线上的任一总线通信节点。
45.第一总线通信节点向第二总线通信节点发送的目标报文,将第一通信总线传输至仪表102;仪表102接收目标报文之后,不对目标报文执行拆包、打包和转发的处理流程,而采用直接转发的方式,通过第二通信总线,向第二总线通信节点发送目标报文,实现目标报文由第一总线通信节点传输至第二总线通信节点。
46.可选地,在各路通信总线101为同一类型的总线(例如均为can总线)的情况下,仪表102可以转发目标报文。
47.可选地,在目标报文的格式为目标格式的情况下,仪表102可以转发目标报文。目标格式是预先确定的报文格式。对于目标格式具体为何种报文格式,本实用新型实施例不进行具体限定。仪表102可以只转发目标格式的报文,禁止非目标格式的报文跨通信总线传输,可以更方便、有效、高效地进行报文管控。
48.本实用新型实施例通过仪表转发第一通信总线上的第一总线通信节点向第二通信总线上的第二总线通信节点发送的目标报文,能降低对仪表的功能要求,能降低目标报文转发出现错误的可能性,能提高目标报文传输的成功率。
49.基于上述任一实施例的内容,目标属性包括通信安全等级、功能类型和升级属性。
50.具体地,通信安全等级,指报文的安全等级。
51.可选地,报文的安全等级,可以是根据报文内容涉及的安全事件的影响范围划分的。例如,对于涉及整个作业机械的安全的报文、涉及作业机械的局部安全的报文和不涉及安全的报文,通信安全等级依次降低。
52.功能类型,指总线通信节点的功能类型。
53.对于总线通信节点的功能类型的具体划分,本实用新型实施例不进行具体限定。
54.可选地,总线通信节点的功能类型可以包括车身控制类、娱乐类、安全监控类和车内环境控制类等类型。
55.可选地,具有ota(空中下载技术,over-the-air technology)功能的作业机械,可以对部分或全部总线通信节点进行固件升级。
56.升级属性,指总线通信节点是否可以升级。
57.可以基于通信安全等级、功能类型或升级属性,对各总线通信节点进行分组,也可以结合通信安全等级、功能类型和升级属性中的至少两个对各总线通信节点进行分组。
58.本实用新型实施例通过将通信安全等级、功能类型和升级属性作为目标属性,能更有效地降低每一路通信总线的负载率并提高通信的安全性。
59.基于上述任一实施例的内容,至少两路通信总线101的波特率不同。
60.具体地,对于各路通信总线101中的任意两路通信总线,可以采用相同或不同的波
特率。对于波特率的具体值,本实用新型实施例不进行具体限定。
61.示例性地,各路通信总线101为两路can总线,两路can总线的波特率可以均为250kbps;或者其中一路的波特率的为250kbps,另一路的波特率的为500kbps,波特率更高的一路can总线所接入的总线通信节点可以基于更高的波特率进行升级,为ota功能提供支持,从而可以更好的使用远程升级,避免因传输速率太低导致升级太慢或升级失败。
62.本实用新型实施例通过各通信总线中至少两路通信总线采用不同的波特率,能更安全、快速、方便地对待升级的总线通信节点进行升级。
63.基于上述任一实施例的内容,各路通信总线101均为can总线。
64.具体地,各路通信总线101可以均为can总线。
65.can总线是一种串行数据通信协议,其通信接口中集成了can协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
66.can总线至少具有以下优点:
67.通信速率最高可达1mb/s(此时距离最长40m);
68.节点数实际可达110个;
69.采用短帧结构,每一帧的有效字节数为8个;
70.每帧信息都有crc校验及其他检错措施,数据出错率极低;
71.通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求;
72.节点在错误严重的情况下,具有自动关闭总线的功能,切断该节点与总线的联系,以使总线上的其他操作不受影响;
73.图2是本实用新型提供的作业机械的总线网络架构的结构示意图之二。图2示出了一种作业机械的总线网络架构,该作业机械可以为起重机。如图2所示,该总线网络架构包括两路can总线(can1和can2)以及仪表201。can1和can2的通信安全等级不同。
74.接入can1的总线通信节点可以包括:远程信息处理器(t-box)211、第一按键面板212、peps_u的控制器213、一键启动系统的控制器214、显示屏215、发动机后处理系统的控制器216、nox传感器217、防抱死制动系统(abs,anti-lock braking system)的控制器218、发动机电子控制单元(ecu,electronic control unit,又称行车电脑)219和车载自诊断(obd,on-board diagnostics)系统的控制器220。其中,发动机电子控制单元219可以连接发动机可编程逻辑器件(pld,programmable logic device)221和发动机预热系统的控制器222。
75.接入can1的总线通信节点还可以包括:缓速器控制器223、自动变速箱控制单元(transmission control unit,tcu)224和变矩器控制器225中的至少一个。
76.接入can2的总线通信节点可以包括:第二按键面板226、中控屏227、空调的控制器228和车身控制模块(body control module,bcm)229。
77.接入can2的总线通信节点还可以包括:旋钮开关230、主控/支腿的控制器231、座椅控制器232、电子助力转向控制器233、悬挂/转向的控制器234、无钥匙进入及启动(peps,passive entry passive start)系统的控制器235、电子转向柱锁(escl,electrical steering colum lock)的控制器236、胎压监测系统的控制器237、前中摄像头238、前中雷
达239、左后雷达240、右后雷达241、esc系统的控制器242和集成式摄像头243中的至少一个。其中,无钥匙进入及启动系统的控制器235可以和电子转向柱锁的控制器236连接;前中摄像头238可以和前中雷达239连接;左后雷达240可以和右后雷达241连接。
78.远程信息处理器211与can1之间设置有终端电阻202;发动机电子控制单元219与can1之间设置有终端电阻202;仪表201与can2之间设置有终端电阻202;车身控制器229与can2之间设置有终端电阻202。
79.本实用新型实施例通过各路通信总线均采用can总线,具有作业机械内部通信的实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。
80.基于上述任一实施例的内容,至少一路通信总线为can总线,至少一路通信总线为lin总线。
81.具体地,各路通信总线101可以包括can总线和lin总线两种类型的总线。各路通信总线101中,can总线的数量为一路或多路。各路通信总线101中,lin总线的数量为一路或多路。
82.lin(局域互联网络,local interconnect network)总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对can等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。lin总线是基于sci/uart(串行接口/通用异步收发器,serial communication interface/universal asynchronous receiver/transmitter)数据格式,采用单主控制器/多从设备的模式,是uart中的一种特殊情况。
83.lin总线可为其他类型的总线提供辅助功能,是一种辅助的总线网络,适用于在不需要其他类型的总线(例如can总线)的带宽和多功能的场合,例如智能传感器和制动装置之间的通讯。
84.本实用新型实施例通过各路通信总线采用can总线和lin总线,能进一步降低成本,能降低作业机械内部通信的带宽需求。
85.基于上述任一实施例的内容,至少一路通信总线为can总线,至少一路通信总线为most总线。
86.具体地,各路通信总线101可以包括can总线和most总线两种类型的总线。各路通信总线101中,can总线的数量为一路或多路。各路通信总线101中,most总线的数量为一路或多路。
87.most(media oriented system transport,面向媒体的系统传输)总线,是一种专门针对车内使用而开发的、服务于多媒体应用的数据总线技术。
88.本实用新型实施例通过各路通信总线采用can总线和most总线,能提高作业机械内部通信中音频和/或视频数据等多媒体数据的传输速率。
89.基于上述任一实施例的内容,至少一路通信总线为flexray总线。
90.具体地,各路通信总线101中,至少一路通信总线的类型可以为flexray总线。
91.flexray总线是一种用于汽车的高速、可确定性的,具备故障容错能力的总线技术,它将事件触发和时间触发两种方式相结合,具有高效的网络利用率和系统灵活性特点,可以作为新一代汽车内部网络的主干网络。
92.flexray总线,专为车内联网而设计,采用基于时间触发机制,具有高带宽、容错性
能好等特点,在实时性、可靠性和灵活性方面具有一定的优势,具有高速、可靠及安全的特点。
93.可以理解的是,作业机械具有汽车的行驶功能,可视为一种特殊的汽车,因而作业机械也可以采用汽车的各种总线(例如lin总线、most总线或flexray总线)。
94.本实用新型实施例通过各路通信总线中的至少一路通信总线采用flexray总线,能提高作业机械内部通信的速率、可靠性和安全性。
95.基于上述任一实施例的内容,一种作业机械包括:上述作业机械的总线网络架构。
96.具体地,本实用新型实施例提供的作业机械可以采用上述任一实施例提供的总线网络架构。
97.本实用新型实施例提供的作业机械通过采用前述作业机械的总线网络架构,将目标属性不同的多路通信总线均与仪表连接,由仪表进行任意两路通信总线之间的交互,能降低每一路通信总线的负载率,能提高通信的稳定性,多路通信总线基于不同的目标属性传输不同的报文,能提高通信的安全性,由于不需要额外增加网关,总线网络架构的结构更简单,更有利于维护及变更,成本更低。
98.基于上述任一实施例的内容,作业机械包括起重机。
99.具体地,本实用新型实施例提供的作业机械可以为起重机。
100.以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
101.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。