1.本实用新型涉及工业机器人领域,尤其涉及一种内走线工业机器人的同轴转动关节的过线保护装置。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.现有的内走线工业机器人的转动关节在进行使用时,内走线容易与外壳接触,从而导致内走线容易磨损,降低了工业机器人的安全性与使用寿命,不利于长期进行使用。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种内走线工业机器人的同轴转动关节的过线保护装置,具备能够对工业机器人的内走线进行一定的保护的优点,解决了现有的工业机器人内走线容易造成磨损的问题。
6.(二)技术方案
7.为实现上述能够对工业机器人的内走线进行一定的保护的目的,本实用新型提供如下技术方案:一种内走线工业机器人的同轴转动关节的过线保护装置,包括第一外壳,所述第一外壳的一侧设置有第二外壳,所述第一外壳与第二外壳之间设置有底部转动件,所述第一外壳与第二外壳的顶部设置有顶部转动件,所述第一外壳与第二外壳的内部设置有线组,所述第一外壳的内表面一侧设置有第一弹簧,所述第一弹簧的一端设置有第一保护套,所述第二外壳的内表面底部设置有第二弹簧,所述第二弹簧的顶端设置有第二保护套,所述第一外壳与第二外壳的连接处设置有关节过线保护装置。
8.优选的,所述关节过线保护装置包括第一转杆,所述第一转杆的一端与第一外壳的内表面一侧之间为转动连接,所述第一转杆的另一端设置有第二转杆,所述第二转杆的一端与第二外壳的内表面底部之间为转动连接,所述第二转杆的另一端设置有转动座,所述转动座的顶部设置有关节保护套。
9.优选的,所述第一转杆的另一端与转动座的一侧之间为转动连接,所述第二转杆的另一端与转动座的一侧之间为转动连接。
10.优选的,所述转动座的顶部与关节保护套的底部之间为固定连接,所述关节保护套的材料为丁腈橡胶。
11.优选的,所述第一弹簧的数量为四组,所述第一保护套的数量为两组,所述一组第一保护套与两组第一弹簧之间相适配。
12.优选的,所述第二弹簧的数量为四组,所述第二保护套的数量为两组,所述一组第
二保护套与两组第二弹簧之间相适配。
13.优选的,所述线组依次贯穿第一保护套与第二保护套,所述第一保护套与第二保护套的材料均为橡胶。
14.(三)有益效果
15.与现有技术相比,本实用新型提供了一种内走线工业机器人的同轴转动关节的过线保护装置,具备以下有益效果:
16.本实用新型中,采用的关节过线保护装置,实现能够对工业机器人的内走线进行一定的保护,在工业机器人的关节进行转动时,第一外壳与第二外壳在底部转动件与顶部转动件的作用下相互移动,使得线组在第一外壳与第二外壳的内部位置发生改变,通过第一弹簧与第一保护套,使得线组不会与第一外壳的内部接触,通过第二弹簧与第二保护套,使得线组不会与第二外壳的内部接触,使得线组不会与外壳接触造成磨损,在关节处,通过第一转杆与第二转杆的支撑作用与关节保护套对线组的束缚,使得线组不会与关节处接触,能够有效防止关节活动时线组与外壳接触造成磨损,从而增加工业机器人的安全性。
附图说明
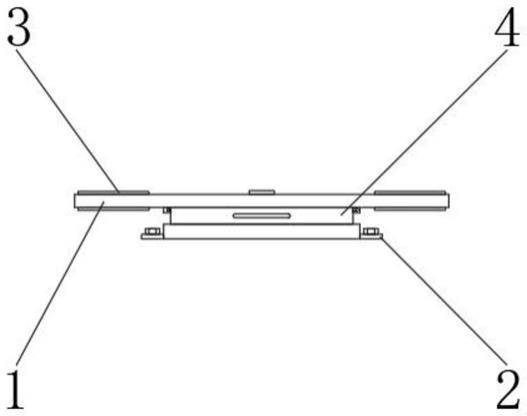
17.图1为本实用新型提出一种内走线工业机器人的同轴转动关节的过线保护装置的整体结构示意图;
18.图2为本实用新型提出一种内走线工业机器人的同轴转动关节的过线保护装置中关节过线保护装置的结构示意图。
19.图例说明:
20.1、第一外壳;2、第二外壳;3、底部转动件;4、顶部转动件;5、线组;6、第一弹簧;7、第一保护套;8、第二弹簧;9、第二保护套;10、关节过线保护装置;101、第一转杆;102、第二转杆;103、转动座;104、关节保护套。
具体实施方式
21.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
22.参照图1-2,一种内走线工业机器人的同轴转动关节的过线保护装置,包括第一外壳1,第一外壳1的一侧设置有第二外壳2,第一外壳1与第二外壳2之间设置有底部转动件3,第一外壳1与第二外壳2的顶部设置有顶部转动件4,第一外壳1与第二外壳2的内部设置有线组5,第一外壳1的内表面一侧设置有第一弹簧6,第一弹簧6的一端设置有第一保护套7,第二外壳2的内表面底部设置有第二弹簧8,第二弹簧8的顶端设置有第二保护套9,第一外壳1与第二外壳2的连接处设置有关节过线保护装置10。
23.进一步的,关节过线保护装置10包括第一转杆101,第一转杆101的一端与第一外壳1的内表面一侧之间为转动连接,第一转杆101的另一端设置有第二转杆102,第二转杆102的一端与第二外壳2的内表面底部之间为转动连接,第二转杆102的另一端设置有转动座103,转动座103的顶部设置有关节保护套104。
24.进一步的,第一转杆101的另一端与转动座103的一侧之间为转动连接,第二转杆102的另一端与转动座103的一侧之间为转动连接。
25.进一步的,转动座103的顶部与关节保护套104的底部之间为固定连接,关节保护套104的材料为丁腈橡胶,增加保护的效果。
26.进一步的,第一弹簧6的数量为四组,第一保护套7的数量为两组,一组第一保护套7与两组第一弹簧6之间相适配。
27.进一步的,第二弹簧8的数量为四组,第二保护套9的数量为两组,一组第二保护套9与两组第二弹簧8之间相适配。
28.进一步的,线组5依次贯穿第一保护套7与第二保护套9,第一保护套7与第二保护套9的材料均为橡胶,便于对线组5进行控制保护。
29.本实用新型的工作原理及使用流程:通过设置的关节过线保护装置10,实现能够对工业机器人的内走线进行一定的保护,在工业机器人的关节进行转动时,第一外壳1与第二外壳2在底部转动件3与顶部转动件4的作用下相互移动,使得线组5在第一外壳1与第二外壳2的内部位置发生改变,通过第一弹簧6与第一保护套7,使得线组5不会与第一外壳1的内部接触,通过第二弹簧8与第二保护套9,使得线组5不会与第二外壳2的内部接触,使得线组5不会与外壳接触造成磨损,在关节处,通过第一转杆101与第二转杆102的支撑作用与关节保护套104对线组5的束缚,使得线组5不会与关节处接触,能够有效防止关节活动时线组5与外壳接触造成磨损,从而增加工业机器人的安全性。
30.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。