1.本发明涉及机器人技术领域,尤其涉及一种自主避障的巡检机器人。
背景技术:
2.巡检机器人在室外、室内巡检领域得到了广泛应用,代替了人工巡检的繁重劳动,还能够应用于通道较窄、有害环境等人工不便于巡检的场所。
3.目前的巡检机器人多采用的是单线激光雷达检测前方是否有障碍物,其摄像头位置固定,监测范围有限,存在较大的视觉盲区,容易与其他物体误碰撞。为解决这一问题,现有专利号为cn111007528a4专利提出了一种巡检机器人,包括机壳、多线激光雷达、单线激光雷达以及多个超声波雷达,所述单线激光雷达和所述多线激光雷达均设于所述机壳的顶部,各个所述超声波雷达设于所述机壳的周侧,所述多线激光雷达的视场角与所述机壳前侧的超声波雷达的视场角交叠设置。本发明提供的巡检机器人,多线激光雷达可以识别外界物体的高度信息,而且能够周向扫描以获取周围环境的三维扫描图,可以加强导航精度和车辆的定位精度。另外,多线激光雷达设于机壳的上方,探测的距离较远,单线激光雷达和超声波雷达的探测距离较近,多线激光雷达的探测区域与超声波雷达的探测区域交叠设置,以弥补单线激光雷达和超声波雷达在机壳前侧的视觉盲区。但是该专利中其摄像头只能观察到其前面的视觉盲区,其后方的区域依旧无法进行探测,探测范围依旧有限。
4.再有现有的巡检机器人中摄像头外防护罩往往是固定套设在摄像头的外围,导致对摄像头的检修和维护非常的不便。为此,我们提出一种自主避障的巡检机器人。
技术实现要素:
5.本发明的目的是针对背景技术中存在的问题,提出一种360
°
无视觉盲区的自主避障巡检机器人。
6.本发明的技术方案:一种自主避障的巡检机器人,包括外箱体,外箱体的内部转动插接有转轴,所述外箱体的正面以及背面均安装有感应头,所述外箱体的底部内壁安装有两个驱动模块箱,且所述驱动模块箱用于驱动转轴进行转动,所述外箱体的内部设置有花键杆,且所述花键杆的底端通过锥齿轮a、锥齿轮b和转轴传动连接,所述花键杆的顶端外围活动套设有花键筒,所述花键筒的顶部固定连接有转接板,所述转接板的顶部固定连接有固定板,所述固定板的一侧安装有摄像头,所述摄像头的外围套设有玻璃外罩。
7.优选的,所述外箱体的底部内壁安装有转向模块,所述转向模块上安装有转向轮。
8.优选的,所述转轴的两端均固定连接有前进轮。
9.优选的,所述外箱体的两侧壁均开设有圆形通孔,圆形通孔的内部均固定连接有轴承a,所述轴承a的内环固定套设在转轴的两端外围。
10.优选的,所述花键杆的底端外围固定套设有轴承b,所述轴承b的外环外壁固定连接有两个l形定位杆,所述l形定位杆的底端和外箱体的底部内壁固定连接。
11.优选的,所述驱动模块箱的顶部固定连接有电机,所述电机的输出轴固定连接有
螺纹杆,且螺纹杆的顶端和外箱体的顶部内壁转动连接,所述螺纹杆的外围螺纹连接有与外箱体内壁滑动连接的滑动板,且所述转接板转动连接在滑动板的内部。
12.优选的,另一所述驱动模块箱的顶部和外箱体的顶部内壁之间固定连接有导向杆,且导向杆活动贯穿滑动板。
13.优选的,所述滑动板的顶部固定连接有两个竖板,两个竖板相互远离的一侧均固定连接有横板,所述横板的顶部转动连接有钩板,且钩板和竖板之间固定连接有弹簧。
14.优选的,所述玻璃外罩的底部开设有多个卡槽,所述外箱体的顶部固定连接有多个卡块,且所述卡块和卡槽一一对应;所述玻璃外罩的内壁固定连接有环形卡板。
15.与现有技术相比,本发明具有如下有益的技术效果:1:本发明在驱动模块箱的驱动下带动转轴和前进轮转动,从而使得机器人前进或后退,在此驱动力下亦可同步带动摄像头和固定板进行360
°
转动,从而使得本发明机器人无盲区,探测效果更佳。
16.2:本发明的通过设置玻璃外罩可以对摄像头进行防护,且玻璃外罩的安装和拆卸不仅简单方便,便于维修人员对摄像头的检修和维护,同时玻璃外罩的拆卸方式是内部启动,外界无法对玻璃外罩进行拆除,从而避免了不良分子对摄像头进行破坏。
附图说明
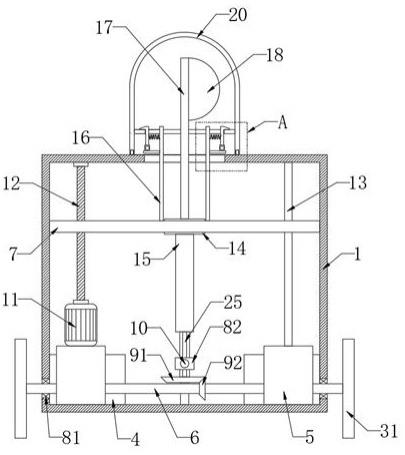
17.图1给出本发明一种实施例的立体结构示意图;图2为图1的正视结构剖切图;图3为图2中a处的结构放大图;图4为图1中玻璃外罩的立体结构示意图。
18.附图标记:1、外箱体;2、感应头;31、前进轮;32、转向轮;4、转向模块;5、驱动模块箱;6、转轴;7、滑动板;81、轴承a;82、轴承b;91、锥齿轮a;92、锥齿轮b;10、l形定位杆;11、电机;12、螺纹杆;13、导向杆;14、转接板;15、花键筒;16、竖板;17、固定板;18、摄像头;19、卡块;20、玻璃外罩;21、横板;22、钩板;23、弹簧;24、环形卡板;25、花键杆。
具体实施方式
19.下文结合附图和具体实施例对本发明的技术方案做进一步说明。
20.实施例一如图1所示,本发明提出的一种自主避障的巡检机器人,包括外箱体1,外箱体1的内部转动插接有转轴6,外箱体1的正面以及背面均安装有感应头2,通过设置感应头2,可以监控机器人其与周边物品的距离,从而便于机器人实现自主避障,外箱体1的底部内壁安装有两个驱动模块箱5,且驱动模块箱5用于驱动转轴6进行转动,外箱体1的内部设置有花键杆25,且花键杆25的底端通过锥齿轮a91、锥齿轮b92和转轴6传动连接,花键杆25的顶端外围活动套设有花键筒15,花键筒15的顶部固定连接有转接板14,转接板14的顶部固定连接有固定板17,固定板17的一侧安装有摄像头18,摄像头18的外围套设有玻璃外罩20。
21.本实施例中:通过锥齿轮a91和锥齿轮b92的传动方式使得转轴6转动时带动花键杆25转动,在实际应用中,可采用其他具有相同功能的传动方式进行传动,同时需要说明的是,在本案例中可调节锥齿轮a91、锥齿轮b92两个相对直径从而调节机器人在心走时摄像
头18的对应转动速率;外箱体1的底部内壁安装有转向模块4,转向模块4上安装有转向轮32,转向模块4和转向轮32起到转向的作用;外箱体1的两侧壁均开设有圆形通孔,圆形通孔的内部均固定连接有轴承a81,轴承a81的内环固定套设在转轴6的两端外围,在本案例中转轴6转动插接在外箱体1的内部,其转接构件最优采用轴承a81,是因为轴承不仅造价低,而且运行稳定性高;转轴6的两端均固定连接有前进轮31;花键杆25的底端外围固定套设有轴承b82,轴承b82的外环外壁固定连接有两个l形定位杆10,l形定位杆10的底端和外箱体1的底部内壁固定连接,需要说明的是,轴承b82和l形定位杆10起着辅助支撑定位花键杆25的作用,在实际应用中,可替换为其他具有相同功能的构件。
22.首先本发明机器人在驱动模块箱5对其驱动下带动转轴6和前进轮31转动,从而带动机器人进行前进后退,转轴6在转动的同时在锥齿轮a91、锥齿轮b92的传动下带动花键杆25和花键筒15转动,花键筒15转动带动转接板14和固定板17转动,从而带动摄像头18360
°
不断转动,从而使得本发明机器人无盲区,探测效果更佳。且摄像头18转动无需另加额外的驱动构件,大大提高了资源的利用率。
23.实施例二如图1-4所示,本发明提出的一种自主避障的巡检机器人,相较于实施例一,本实施例还包括驱动模块箱5,驱动模块箱5的顶部固定连接有电机11,电机11的输出轴固定连接有螺纹杆12,且螺纹杆12的顶端和外箱体1的顶部内壁转动连接,螺纹杆12的外围螺纹连接有与外箱体1内壁滑动连接的滑动板7,且转接板14转动连接在滑动板7的内部;另一驱动模块箱5的顶部和外箱体1的顶部内壁之间固定连接有导向杆13,且导向杆13活动贯穿滑动板7;滑动板7的顶部固定连接有两个竖板16,两个竖板16相互远离的一侧均固定连接有横板21,横板21的顶部转动连接有钩板22,且钩板22和竖板16之间固定连接有弹簧23。
24.本发明的通过设置玻璃外罩20可以对摄像头18进行防护,且玻璃外罩20的安装和拆卸不仅简单方便,便于维修人员对摄像头18的检修和维护,同时玻璃外罩20的拆卸方式是内部启动,外界无法对玻璃外罩20进行拆除,从而避免了不良分子对摄像头18进行破坏。
25.玻璃外罩20的拆卸方式为:运行电机11带动螺纹杆12转动,在导向杆13导向的作用下带动滑动板7向上滑动,滑动板7向上滑动带动竖板16、横板21、钩板22整体向上移动,这样钩板22的挂钩处就脱离了环形卡板24的顶部,这样就可以手持玻璃外罩20将玻璃外罩20向上提起一小段高度,使得卡槽脱离卡块19,然后斜向偏移玻璃外罩20,使得钩板22脱离环形卡板24,然后就可以取下玻璃外罩20,安装玻璃外罩20时,用手捏住钩板22朝着弹簧23方向转动,直至钩板22伸入玻璃外罩20的内部环形卡板24的上方,然后对齐卡块19和卡槽按上即可,最后反向运行电机11,在弹簧23弹力作用下同理带动钩板22勾住环形卡板24的顶部,从而完成了玻璃外罩20的定位安装,且不运行电机11无法从外部取下玻璃外罩20。
26.上述具体实施例仅仅是本发明的几种优选的实施例,基于本发明的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。