技术特征:
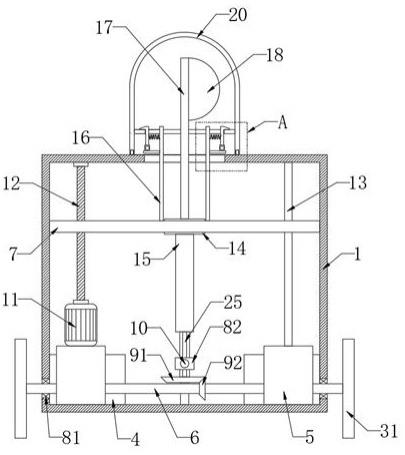
1.一种自主避障的巡检机器人,包括外箱体(1),外箱体(1)的内部转动插接有转轴(6),所述外箱体(1)的正面以及背面均安装有感应头(2),其特征在于:所述外箱体(1)的底部内壁安装有两个驱动模块箱(5),且所述驱动模块箱(5)用于驱动转轴(6)进行转动,所述外箱体(1)的内部设置有花键杆(25),且所述花键杆(25)的底端通过锥齿轮a(91)、锥齿轮b(92)和转轴(6)传动连接,所述花键杆(25)的顶端外围活动套设有花键筒(15),所述花键筒(15)的顶部固定连接有转接板(14),所述转接板(14)的顶部固定连接有固定板(17),所述固定板(17)的一侧安装有摄像头(18),所述摄像头(18)的外围套设有玻璃外罩(20)。2.根据权利要求1所述的一种自主避障的巡检机器人,其特征在于,所述外箱体(1)的底部内壁安装有转向模块(4),所述转向模块(4)上安装有转向轮(32)。3.根据权利要求1所述的一种自主避障的巡检机器人,其特征在于,所述转轴(6)的两端均固定连接有前进轮(31)。4.根据权利要求3所述的一种自主避障的巡检机器人,其特征在于,所述外箱体(1)的两侧壁均开设有圆形通孔,圆形通孔的内部均固定连接有轴承a(81),所述轴承a(81)的内环固定套设在转轴(6)的两端外围。5.根据权利要求4所述的一种自主避障的巡检机器人,其特征在于,所述花键杆(25)的底端外围固定套设有轴承b(82),所述轴承b(82)的外环外壁固定连接有两个l形定位杆(10),所述l形定位杆(10)的底端和外箱体(1)的底部内壁固定连接。6.根据权利要求2所述的一种自主避障的巡检机器人,其特征在于,所述驱动模块箱(5)的顶部固定连接有电机(11),所述电机(11)的输出轴固定连接有螺纹杆(12),且螺纹杆(12)的顶端和外箱体(1)的顶部内壁转动连接,所述螺纹杆(12)的外围螺纹连接有与外箱体(1)内壁滑动连接的滑动板(7),且所述转接板(14)转动连接在滑动板(7)的内部。7.根据权利要求6所述的一种自主避障的巡检机器人,其特征在于,另一所述驱动模块箱(5)的顶部和外箱体(1)的顶部内壁之间固定连接有导向杆(13),且导向杆(13)活动贯穿滑动板(7)。8.根据权利要求7所述的一种自主避障的巡检机器人,其特征在于,所述滑动板(7)的顶部固定连接有两个竖板(16),两个竖板(16)相互远离的一侧均固定连接有横板(21),所述横板(21)的顶部转动连接有钩板(22),且钩板(22)和竖板(16)之间固定连接有弹簧(23)。9.根据权利要求8所述的一种自主避障的巡检机器人,其特征在于,所述玻璃外罩(20)的底部开设有多个卡槽,所述外箱体(1)的顶部固定连接有多个卡块(19),且所述卡块(19)和卡槽一一对应;所述玻璃外罩(20)的内壁固定连接有环形卡板(24)。
技术总结
本发明涉及机器人技术领域,尤其涉及一种自主避障的巡检机器人。其技术方案包括:外箱体,外箱体的内部转动插接有转轴,所述外箱体的正面以及背面均安装有感应头,所述外箱体的底部内壁安装有两个驱动模块箱,且所述驱动模块箱用于驱动转轴进行转动,所述外箱体的内部设置有花键杆,且所述花键杆的底端通过锥齿轮a、锥齿轮b和转轴传动连接,所述花键杆的顶端外围活动套设有花键筒,所述花键筒的顶部固定连接有转接板,所述转接板的顶部固定连接有固定板,所述固定板的一侧安装有摄像头,所述摄像头的外围套设有玻璃外罩。本发明解决了现有巡检机器人存在视觉盲区,探测范围有限的问题。题。题。
技术研发人员:常峰贵 梅尔文
受保护的技术使用者:山东硅步机器人技术有限公司
技术研发日:2021.11.05
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。