技术特征:
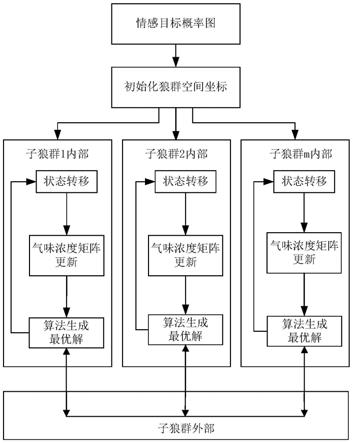
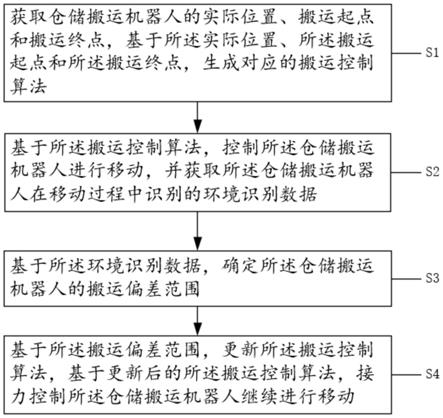
1.一种多智能体搜索情感目标路径规划方法,其特征在于,包括:获取预设的基于基本情感集合、情感状态自转移概率矩阵和初始时刻情感状态分布概率矩阵,通过马尔科夫链情感自转移模型获取某一时刻的情感状态概率分布矩阵;在搜索目标的活动范围内构建栅格系统,对各栅格的目标概率进行迭代,并在此基础上结合“情感-位移”转换概率矩阵,依次对各栅格进行计算从而更新目标概率图,定义智能体搜索目标首次预警后消失时为初始时刻,获取此时目标的所处栅格,并构建初始时刻的目标概率图模型;基于概率收益、重复路径代价、能量损耗代价、转向调整代价和实时动态自适应代价权重系数构建智能体搜索协同优化实时自适应多目标函数;基于改进的多狼群算法对所述多智能体搜索协同优化实时多目标函数进行求解,得到最终搜索路径规划方案。2.根据权利要求1所述的一种多智能体搜索情感目标路径规划方法,其特征在于,对各栅格的目标概率进行迭代,包括:设定目标每个时间步内的位移决策至多存在九种情况,依次定义当前栅格对应的发散位移集合以及发散位移集合对应的栅格集合、聚拢位移集合以及聚拢位移集合对应的栅格集合;计算获取某时刻聚拢位移栅格集合中所有栅格向对应中心栅格位移的概率,即对某一栅格的聚拢位移概率集合求和,进而可通过情感状态与位移决策求解对应中心栅格的存在目标的概率,并作为任务中实时更新某时刻未检测的栅格存在目标的概率。3.根据权利要求1所述的一种多智能体搜索情感目标路径规划方法,其特征在于,方法还包括依据天气能见度设计智能体传感器探测概率与虚警概率模型,作为在任务中实时更新某时刻检测的栅格存在目标概率。4.根据权利要求1所述的一种多智能体搜索情感目标路径规划方法,其特征在于,基于改进的多狼群算法对所述多智能体搜索协同优化实时多目标函数进行求解,包括基于人工狼步长因子基础值、迭代后某普通人工狼所处位置的势场函数值以及预设的势场影响因子计算步长因子;所述迭代后某普通人工狼所处位置的势场函数值根据迭代时该普通人工狼所处位置的引力势场函数、迭代时该普通人工狼所处位置斥力势场函数求取。5.根据权利要求1所述的一种多智能体搜索情感目标路径规划方法,其特征在于,基于改进的多狼群算法对所述多智能体搜索协同优化实时多目标函数进行求解,包括设置“嚎叫”环节以实现狼群之间的信息共享,具体包括以下步骤:a.比较得出子狼群中的预备最优解对应气味浓度;b.接收其他子狼群之间的最优解信息;c.判断此解是否满足算法的全局性要求,若此解与其他已知人工狼探索范围发生重复,则对该函数值进行惩罚然后转到步骤a;否则,转到步骤d;d.判断此解是否满足约束条件,若不满足约束条件,选择次优解,转回步骤d,若满足约束条件,转到步骤e;e.将此解发布到所有狼群之间。6.根据权利要求1所述的一种多智能体搜索情感目标路径规划方法,其特征在于,基于改进的多狼群算法对所述智能体搜索协同优化多目标函数进行求解,包括气味浓度的数值
和速率两方面对人工狼进行淘汰,并相应的生成与淘汰数量相等的新的人工狼。7.一种电子装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器通过所述计算机程序运行执行所述权利要求1至6中任一项权利要求所述的一种多智能体搜索情感目标路径规划方法。
技术总结
本发明提供一种多智能体搜索情感目标路径规划方法及装置,方法包括:基于初始时刻情感状态分布概率矩阵、基本情感自转移概率矩阵以及“情感-位移”概率矩阵计算获取某一时刻的基于情感的目标移动的概率;获取某一时刻的基于情感的目标概率分布图模型,获取初始时刻目标的所处栅格,并构建初始时刻的目标概率图模型;对目标概率进行迭代,依次对各栅格进行计算从而更新目标概率图;基于概率收益、重复路径代价、能量损耗代价、转向调整代价和动态自适应代价权重系数构建智能体搜索协同优化实时多目标函数;基于改进的多狼群算法对所述智能体搜索协同优化多目标函数进行求解,得到最终搜索路径规划方案。终搜索路径规划方案。终搜索路径规划方案。
技术研发人员:岳伟 辛弘 刘中常 邹存名 李莉莉 王丽媛
受保护的技术使用者:大连海事大学
技术研发日:2021.11.29
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。