1.本发明涉及中继协同无人机技术领域,尤其是涉及一种中继协同无人机任务规划方法及装置。
背景技术:
2.复杂的战场环境中,战机稍纵即逝,因此在完成“情报侦察-摧毁打击”任务时,就需要快速衔接好侦察无人机(surveillance uav,suav)、打击无人机(combat uav,cuav)及地面控制站(ground control station,gcs),实现作战节点间信息的及时交互。在现代战争中,单无人机、单类型无人机作战能力有限,且容易被敌方摧毁,多无人机协同作战成为主要作战趋势。为有效扩大多无人机作战范围,加强多无人机作战能力,协调好空空、空地、地地作战进程,就需要信息情报交流,以整体战场态势为重点、通盘考虑战场全局,利用高效的纵深情报,突出我方优势,击敌劣势,己方能够相互依靠,相互支援,共同进退,从而使得多无人机作战发挥出“1 1》2”的作战效能。
3.中继无人机任务规划,指的是通过在作战区域部署中继无人机,作为各类型的无人机及无人机与地面控制站的信息交互中心,使得战场空间内多维作战力量的实时通信。任务规划是多无人机之间协同完成任务的关键技术,决定了无人机执行任务时的相互协同、任务的合理分配以及航迹规划的实用性。中继无人机任务规划需要根据中继无人机与重点目标的距离约束及地面测控站及无人机基地的位置信息,以部署最少中继无人机数量及中继无人机安全为目标,完成中继无人机任务分配及部署。
4.现有技术中将中继节点部署问题考虑为单源最短路径问题,在中继节点数量一定的情况下,提出了基于bellman-ford算法的ahop(all hops optimal path)算法,得出最小化路径代价和跳数的pareto解。现有技术中针对战场可能出现的紧急通信需求,建立了基于多无人机的中继节点布置问题模型,提出了一种两阶段多项式中继节点布置算法,可有效满足作战中对中继无人机的需求。但是该算法布置中继节点时,只能在等间距布置的离散位置点上选取,在实际战场应用中不具有普适性。现有技术中提出了一种基于贪婪算法和粒子群算法的任务关键型构建算法fanet(flying ad hoc network),该算法能通过将多个任务分配给一定数量的中继无人机,从而确定中继节点的位置,这能在满足中继任务情况下,有效的部署中继无人机的位置,但在用最少的中继无人机数量来有效完成中继无人机的部署方面考虑不够。现有技术中研究的是单无人机担任移动中继优化网络性能的无人机中继部署问题,不仅研究了系统的吞吐量最大化,同时保证可靠性的无人机中继网络部署问题。现有技术中针对任务规划中,中继无人机部署效率低、部署方案无法满足最少数量要求等问题,提出了一种中继无人机快速部署策略,建立了基于最少中继节点的部署模型,并采用结合了深度优先搜索的人工蜂群算法的进行求解,能够得到最少中继无人机节点的部署方案,但仅仅考虑的是无人机单基地及中继节点部署最少,没有结合战场实际威胁,加强中继无人机的安全要求。上述方法虽然能够在一定程度解决中继无人机的部署问题,但都是单地面控制站基地,控制站应随着战场态势有适当的变化、并应考虑备选地面控制站
基地情况以及注重结合战场实际注重中继节点的安全部署问题。
技术实现要素:
5.本发明的目的在于提供一种中继协同无人机任务规划方法及装置,旨在解决现有技术中的上述问题。
6.本发明提供一种中继协同无人机任务规划方法,包括:
7.步骤1,进行参数初始化,载入无人机、基地、以及威胁点数据;
8.步骤2,通过voronoi图生成任务环境空间以及可通信路径,确定对应的目标函数和约束条件,其中,无人机的位置被限制于voronoi图的边界上;
9.步骤3,基于voronoi图生成的任务环境空间以及可通信路径,根据对应的目标函数和约束条件,采用麻雀搜索算法ssa计算无人机即麻雀的适应度值,获取当前最优适应度值和最差适应度值,以及相对应的位置;
10.步骤4,采用麻雀搜索算法ssa,从适应度值较优的麻雀中,选取部分麻雀作为发现者,并进行发现者位置更新,将余下麻雀作为跟随者,并进行跟随者位置更新,从麻雀中选择部分麻雀作为警戒者,进行警戒者位置更新;
11.步骤5,根据发现者位置更新、跟随者位置更新以及警戒者位置更新,重新计算麻雀的适应度值并更新历史最优麻雀位置,判断是否达到结束条件,如果达到,则输出最优麻雀位置,否则,执行步骤3。
12.本发明提供一种中继协同无人机任务规划装置,包括:
13.初始化模块,用于进行参数初始化,载入无人机、基地、以及威胁点数据;
14.voronoi图生成模块,用于通过voronoi图生成任务环境空间以及可通信路径,确定对应的目标函数和约束条件,其中,无人机的位置被限制于voronoi图的边界上;
15.麻雀搜索算法模块,用于基于voronoi图生成的任务环境空间以及可通信路径,根据对应的目标函数和约束条件,采用麻雀搜索算法ssa计算无人机即麻雀的适应度值,获取当前最优适应度值和最差适应度值,以及相对应的位置;采用麻雀搜索算法ssa,从适应度值较优的麻雀中,选取部分麻雀作为发现者,并进行发现者位置更新,将余下麻雀作为跟随者,并进行跟随者位置更新,从麻雀中选择部分麻雀作为警戒者,进行警戒者位置更新;根据发现者位置更新、跟随者位置更新以及警戒者位置更新,重新计算麻雀的适应度值并更新历史最优麻雀位置,判断是否达到结束条件,如果达到,则输出最优麻雀位置,否则,返回重新计算无人机即麻雀的适应度值。
16.采用本发明实施例,通过v-ssa算法得到了满足目标函数的最优中继无人机部署的方案,相比于v-ga算法、v-pso算法在性能上有一定的提升。
17.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
18.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的
附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
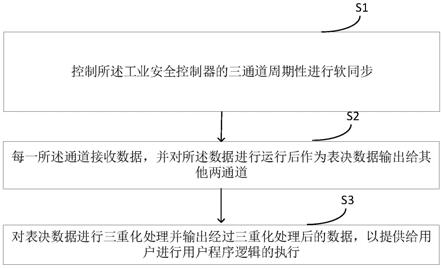
19.图1是本发明实施例的中继协同无人机任务规划方法的流程图;
20.图2是本发明实施例的任务场景的示意图;
21.图3是本发明实施例的v-ssa算法的详细处理流程图;
22.图4是本发明实施例的中继节点部署图;
23.图5是本发明实施例的ga算法中继节点部署图;
24.图6是本发明实施例的pso算法中继节点部署图;
25.图7是本发明实施例的v-ssa算法中继节点部署图;
26.图8是本发明实施例的算法的适应度函数曲线的示意图;
27.图9是本发明实施例的中继协同无人机任务规划装置的示意图。
具体实施方式
28.针对现有技术中的额外难题,本发明实施例提供了一种基于voronoi图-麻雀(voronoi-sparrow search algorithm,v-ssa)算法的中继无人机安全有效的分配部署策略。通过建立基于最少中继节点及最远目标安全距离的部署模型,采用基于voronoi图的麻雀算法来实现问题的求解。在模型求解过程中,以最少中继节点数量和距离重要目标最远为目标函数,使用麻雀算法优化调整有效节点部署位置,经仿真结果表明,v-ssa算法得到了满足目标函数的最优中继无人机部署方案,相比于v-ga算法、v-pso算法在性能上有一定的提升。
29.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.方法实施例
31.根据本发明实施例,提供了一种中继协同无人机任务规划方法,图1是本发明实施例的中继协同无人机任务规划方法的流程图,如图1所示,根据本发明实施例的中继协同无人机任务规划方法具体包括:
32.步骤1,进行参数初始化,载入无人机、基地、以及威胁点数据;所述参数具体包括:种群数量、最大迭代次数、发现者比例、侦察这比例、以及警戒阈值;
33.步骤2,通过voronoi图生成任务环境空间以及可通信路径,确定对应的目标函数和约束条件,其中,无人机的位置被限制于voronoi图的边界上;
34.所述步骤2具体包括:
35.根据公式1,采用实数编码方式,通过voronoi图生成任务环境空间以及可通信路径,确定是voronoi图生成的每个可通行路径的优先级pr以及中继点位置系数r:
[0036][0037]
其中,m
p
为可通行路径的数量。
[0038]
步骤21:根据优先级,将所有voronoi图生成的每个可通行路径进行排序,按照排序后的顺序s依次操作;
[0039]
步骤22:令i=1;
[0040]
步骤23:对于第s(i)个子路径,设当前子路径的两个端点为n1,n2,则中继点位置为nz=r(n1-n2) n2;
[0041]
步骤24:计算当前中继点和其他目标点的距离,判断其可覆盖的目标点数量;
[0042]
步骤25:如果新设中继点在当前位置,增加可覆盖的目标点数量,则该中继点位置保存;
[0043]
步骤26:如果所有目标点均被覆盖,则执行步骤27,否则i=i 1并执行步骤23;
[0044]
步骤27:计算目标函数和约束条件。
[0045]
其中,采用voronoi图计算得到公式2所示的点与边的集合,生成的任务环境空间以及可通信路径:
[0046][0047]
其中,t为目标集合,p为威胁源的集合,v为voronoi图的顶点集合,e为voronoi图边集,从v中的节点指向t中的节点,表示所有可能的路径;
[0048]
根据公式3和公式4确定基于最少中继节点的部署模型的目标函数和约束条件:
[0049][0050][0051]
其中,j1表示自身与目标的距离最远的目标,j2有效无人机数量的目标,n表示最多被使用的无人机的架数,nr为实际使用的无人机中,每个无人机是否被部署zi,zi∈{1,0}以及其部署的位置(xi,yi),其中i∈{1,2,
…
nr},无人机所在的节点为,a
ij
表示第i个无人中继机是否部署在第j条边上,d
sf
表示无人机之间的最小安全距离,d0是无人机的覆盖范围,即通信半径,安全距离d
sf
小于通信距离d0,d(u,v)表示节点u和v之间的欧氏
距离,w(u,v)表示无人机u是否覆盖了节点v,是则为1,否则为0,n
p
为危险源的数量,n
t
表示打击目标的数量。
[0052]
步骤3,基于voronoi图生成的任务环境空间以及可通信路径,根据对应的目标函数和约束条件,采用麻雀搜索算法ssa计算无人机即麻雀的适应度值,获取当前最优适应度值和最差适应度值,以及相对应的位置;
[0053]
步骤4,采用麻雀搜索算法ssa,从适应度值较优的麻雀中,选取部分麻雀作为发现者,并进行发现者位置更新,将余下麻雀作为跟随者,并进行跟随者位置更新,从麻雀中选择部分麻雀作为警戒者,进行警戒者位置更新;
[0054]
步骤5,根据发现者位置更新、跟随者位置更新以及警戒者位置更新,重新计算麻雀的适应度值并更新历史最优麻雀位置,判断是否达到结束条件,如果达到,则输出最优麻雀位置,否则,执行步骤3。具体地,可判断是否达到最大迭代次数,如果达到,则输出最优麻雀位置,否则,执行步骤3。
[0055]
以下对本发明实施例的上述技术方案进行详细说明。
[0056]
在作战区域内存在数个目标需要侦察-打击任务及敌雷达等威胁点,而在执行任务时因为存在有效通信距离限制,故需要通信中继无人机进行辅助通信,将地面控制站和整个作战区域进行有效联通。
[0057]
图2是本发明实施例的中继无人机部署的任务场景的示意图,如图2所示,有三种类型的节点,在表1中,汇总了三类节点的相关信息。其中类型一为需要完成侦察-打击任务的重点目标(图中红色六角星目标);类型二为个无人机发射阵地、备选发射阵地及地面控制站位置(图中粉色矩形);类型三为无人机需要绕开的敌威胁点(图中绿色原点)。
[0058]
表1三类节点信息
[0059][0060]
本次任务可分为两大类无人机,即中继无人机ruav和任务无人机muav主要有cuav、suav,中继无人机的通信半径为d0,数量为nr。
[0061]
本发明实施例所建立模型的前提及假设如下:(1)中继无人机性能良好,均在航程内飞行。(2)在假设的中继范围内均认为可以建立通信联络。
[0062]
在本发明实施例中,voronoi图是以几何学方法为依据,能够有效将地理信息中点对象和区域以拓扑结构表示出来。在中继无人机领域应用时,因其具有很好的全局规划特性,被广泛使用于相关问题求解。因此,本发明实施例采用voronoi图,来生成任务环境空间。中继无人机的位置被限制于voronoi图的边界上,以降低问题复杂度,提高求解速度和求解精度
[0063]
采用voronoi图后可以获得点与边的集合,这些集合可以被表示为:
[0064]
[0065]
式中:t为目标集合,p为威胁源的集合,v为voronoi图的顶点集合,e为voronoi图边集,从v中的节点指向t中的节点,表示所有可能的路径。
[0066]
本发明实施例的决策变量为nr个无人机中,每个无人机是否被部署zi,zi∈{1,0}以及其部署的位置(xi,yi),其中i∈{1,2,
…
nr},中继无人机所在的节点为
[0067]
在本发明实施例中,考虑的约束有:
[0068]
中继无人机仅能部署在voronoi图生成的边上。对于第i个中继无人机,有且仅能部署在一条边上。令a
ij
表示第i个无人中继机是否部署在第j条边上。则应满足约束
[0069][0070]
最多仅有n架无人中继机被使用
[0071][0072]
满足中继无人机的通信范围限制,为确保各中继无人机能够中继通信,直接相互联通的通信中继节点之间的距离不得大于d0,应符合如下公式约束:
[0073]
max d(yi,yj)≤d0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0074]
式中,d(u,v)表示节点u和v之间的欧氏距离。
[0075]
为确保无人机飞行的安全,无人机之间的须限定一定的安全间隔,即中继无人机之间以及中继无人机和各任务机之间的安全距离。所以,中继无人机之间的最小安全距离如下所示:
[0076]
min d(yi,yj)≥d
sf
ꢀꢀꢀꢀꢀꢀꢀ
(5)
[0077]
式中,d
sf
表示无人机之间的最小安全距离。安全距离d
sf
必须远小于通信距离d0,并且假定tuav之间的距离是保持安全的。
[0078]
当然,重要目标点必须在覆盖中继无人机的通信范围内。
[0079]
min d(y,pi)≤d0ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0080]
其中,d0是无人机的的覆盖范围,即通信半径。
[0081]
在使用无人机作战时,通过部署最佳的无人机数目,降低无人机的总通信能耗,单次任务中出动的无人机数量越少,行动的效费比就越高,对后勤保障资源的压力就越小,可能的损失也越小。对于中继无人机的部署,要在满足通信要求和安全性能的前提下,使用尽可能少的中继无人机来保证所有任务机与测控系统的稳定性和鲁棒性。因此,本发明实施例的中继无人机部署模型有两个目标,分别为以中继无人机数量最少,距离重点目标的距离最远(即总距离最大)。
[0082]
为了保证安全,无人中继机需要在覆盖重要目标的同时使自身与目标的距离最远。该目标j1可以表示为:
[0083][0084]
w(u,v)表示无人机u是否覆盖了节点v,是则为1,否则为0。
[0085]
此外,有效中继无人机数量n可采用公式(8)表示:
[0086][0087]
综上所述,结合有效通信距离约束、安全距离约束等条件,基于最少中继节点的部署模型的目标函数如式(9)所示、约束如式(10)所示:
[0088][0089][0090]
麻雀搜索算法即ssa算法由薛建凯于2020年提出,它通过麻雀个体搜寻食物和反捕食进行迭代寻优,具有调整参数少、收敛速度快、计算简单等优点。
[0091]
麻雀集合矩阵如下:
[0092]
x=[x1,x2,l,xm]
t
,xi=[x
i,1
,x
i,2
,l,x
i,d
]
ꢀꢀꢀ
(11)
[0093]
式中,m是麻雀的规模,i=(1,2,l,n),d是变量的维数。
[0094]
麻雀的适应度值矩阵表示如下:
[0095]fx
=[f(x1),f(x2),l,f(xm)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0096]
f(xi)=[f(x
i,1
),f(x
i,2
),l,f(x
i,d
)]
ꢀꢀꢀꢀꢀꢀ
(13)
[0097]
其中:m表示麻雀的数量,而f
x
中的每个值表示个体的适应度值。适应度值更优的麻雀率先取得食物,并作为发现者带领整个种群向食物源靠近。发现者的位置更新方式如下:
[0098][0099]
其中:t表示当前迭代次数,j=(1,2,l,d),表示第i个麻雀在第j维的位置。iter
max
表示最大迭代次数,α∈(0,1)范围的一个随机数,r2(r2∈[0,1])、st(st∈[0.5,1])依次代表预警值和安全值。q为服从[0,1]正态分布的随机数。l为1xd的矩阵,且矩阵内每个元素为1。当r2《st,表示附近没有天敌,发现者实行广泛搜索模式。如果r2≥st,这意味着一些麻雀已经察觉到了天敌,则整个种群需要尽快前往其它安全区域。跟随者的位置更新公
式如下:
[0100][0101]
x
worst
表示全局最差的位置,a为1xd的矩阵,且矩阵中每个元素随机赋值1或-1,其中a
=a
t
(aa
t
)-1
。当时,表示适应度值较差的第i个跟随者未取得食物,能量值较低,需要前往别的区域寻找食物,以补充能量。
[0102]
侦查预警行为:种群觅食时,会选取部分麻雀负责警戒,当天敌靠近时,无论是发现者还是跟随者,都将会放弃当前的食物而飞往到另一个位置。每代从种群中随机选取sd(一般取10%-20%)只麻雀进行预警行为。其位置更新公式为:
[0103][0104]
其中:x
best
表示全局最佳的位置,β为步长调整系数,是一个均值为0、方差为1的正态分布随机数,k∈[-1,1]范围内的一个均匀随机数。这里,fi是当前麻雀的适应度值。fg和fw依次为目前全局最优和最差适应度值。ε为最小常数,防止分母出现0的情况。当fi》fg时,表示麻雀处于种群的边缘地带,非常容易被天敌所袭击;fi=fg表明在种群中心的麻雀察觉到了被天敌袭击的危险,需要向其它麻雀靠拢。k表示麻雀运动的方位,为步长调整系数。
[0105]
基于voronoi图的编码方式:
[0106]
voronoi图能够有效的将地理信息中的点、对象和区域以拓扑结构表示出来,并能通过这些拓扑关系表示自然语言中的定性关系和模糊地理信息。在通过卫星确定了危险区域后,根据危险区域,在平面内就可以划分成距离各个点或者实体一定距离的凸网,其距离可以根据具体情况设置。这个凸网称为voronoi图,voronoi图各边即为uav可通行的安全路径。
[0107]
本发明实施例的编码方式为实数编码,由两部分构成,分别是voronoi图生成的每个可通行路径的优先级pr以及中继点位置系数r。
[0108][0109]
其中m
p
为可通行路径的数量。该编码方式可以将约束的处理从初始解生成,转移到解码流程中,避免在新解生成时的约束处理以及错误修正。这种方法可以有效降低算法设计和运行的复杂度,同时避免错误修正时信息的损失。
[0110]
基于voronoi图的解码方式:
[0111]
由于本发明实施例并未直接决策变量作为编码,需要通过解码,将编码转化为决策变量并计算适应度函数值。解码流程如下:
[0112]
步骤1:根据优先级,将所有voronoi图生成的每个可通行路径进行排序,按照排序后的顺序s依次操作。
[0113]
步骤2:令i=1。
[0114]
步骤3:对于第s(i)个子路径,设当前子路径的两个端点为n1,n2,则中继点位置为:
[0115]
nz=r(n1-n2) n2
ꢀꢀꢀꢀꢀꢀ
(18)
[0116]
步骤4:计算当前中继点和其他目标点的距离,判断其可覆盖的目标点数量。
[0117]
步骤5:如果新设中继点在当前位置,可以增加可覆盖的目标点数量,则该中继点位置保存。
[0118]
步骤6:如果所有目标点均被覆盖,则前往步骤7,否则i=i 1并前往步骤3。
[0119]
步骤7:计算目标函数。
[0120]
综上所述,如图3所示,采用本发明实施例的技术方案的处理流程如下:
[0121]
步骤1:初始化参数,如种群数量p,最大迭代次数,发现者比例为pd,侦察者比例为sd,警戒阈值r2等。
[0122]
步骤2:计算各只麻雀的适应度值,找出当前最优适应度值和最差适应度值,以及相对应的位置。
[0123]
步骤3:从适应度值较优的麻雀中,选取部分麻雀作为发现者,并按照式(14)更新位置。
[0124]
步骤4:余下麻雀作为跟随者,并按照式(15)更新位置。
[0125]
步骤5:从麻雀中随机选择部分麻雀作为警戒者,并按照式(16)更新位置。
[0126]
步骤6:判断是否达到结束条件,若是,则进行下一步,否则跳转步骤2。
[0127]
步骤7:程序结束,输出最优结果。
[0128]
仿真实验:在本发明实施例中,仿真实验平台为amd ryzen 5 3500u/8gb/64位win10操作系统的华为荣耀magicbook2019笔记本。编程工具为matlabr2016b(64位)。对仿真实验参数设置如表2所示,其中包括约束参数、测控系统位置及人工蜂群算法参数。
[0129]
表2实验参数设置
[0130][0131]
实验一:
[0132]
本发明实施例假设有3个重要目标、8个安全阵地(中继无人机基地、gcs基地)、57个敌威胁点。目标三种类型的点位置坐标,如表3所示。通过仿真实验,可得到基于v-ssa算法的中继节点部署结果,如图4所示,验证了算法的有效性。
[0133]
表3任务节点位置坐标
pso算法求解得到的中继无人机数量为12架,相对于前者中继无人机数量增加了15.47%。v-ssa算法求解得到的中继无人机数量为11架,在于重点目标总距离上,v-ssa算法为957.6147km,比v-ga算法提升了7%,比v-pso算法提升了4%.说明v-ssa算法离重点目标较远,威胁就相对较小,从而安全性更高。
[0142]
表4中继节点平均数量表
[0143][0144]
综上所述,本发明实施例提出了一种基于v-ssa算法的中继无人机有效安全部署策略,仿真验证了所提出航迹规划算法能够有效解决中继无人机部署效率低、部署方案无法满足最少数量要求及中继机安全性等问题,主要得到以下结论:(1)v-ssa算法,实现了节点间可行链路的有效搜索,可为解决其它图论问题提供参考。(2)本发明实施例提出的中继无人机部署策略可有效解决中继无人机安全部署问题,且求解得到部署方案相比于v-ga算法、v-pso算法实用性更强、效率及中继无人机安全性更高。
[0145]
装置实施例
[0146]
根据本发明实施例,提供了一种中继协同无人机任务规划装置,图9是本发明实施例的中继协同无人机任务规划装置的示意图,如图9所示,根据本发明实施例的中继协同无人机任务规划装置具体包括:
[0147]
初始化模块90,用于进行参数初始化,载入无人机、基地、以及威胁点数据;所述参数具体包括:种群数量n、最大迭代次数、发现者比例、侦察这比例、以及警戒阈值;
[0148]
voronoi图生成模块92,用于通过voronoi图生成任务环境空间以及可通信路径,确定对应的目标函数和约束条件,其中,无人机的位置被限制于voronoi图的边界上;
[0149]
麻雀搜索算法模块94,用于基于voronoi图生成的任务环境空间以及可通信路径,根据对应的目标函数和约束条件,采用麻雀搜索算法ssa计算无人机即麻雀的适应度值,获取当前最优适应度值和最差适应度值,以及相对应的位置;采用麻雀搜索算法ssa,从适应度值较优的麻雀中,选取部分麻雀作为发现者,并进行发现者位置更新,将余下麻雀作为跟随者,并进行跟随者位置更新,从麻雀中选择部分麻雀作为警戒者,进行警戒者位置更新;根据发现者位置更新、跟随者位置更新以及警戒者位置更新,重新计算麻雀的适应度值并更新历史最优麻雀位置,判断是否达到结束条件,如果达到,则输出最优麻雀位置,否则,返回重新计算无人机即麻雀的适应度值。麻雀搜索算法模块94具体用于:判断是否达到最大迭代次数,如果达到,则输出最优麻雀位置,否则,返回重新计算无人机即麻雀的适应度值。
[0150]
本发明实施例是与上述方法实施例对应的装置实施例,各个模块的具体操作可以参照方法实施例的描述进行理解,在此不再赘述。
[0151]
以上所述仅为本文件的实施例而已,并不用于限制本文件。对于本领域技术人员来说,本文件可以有各种更改和变化。凡在本文件的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本文件的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。