1.本发明涉及伺服电机的制动技术,尤其涉及一种伺服驱动器的动态制动控制方法。
背景技术:
2.通常伺服电机的动态制动由动态制动电阻构成,在设备故障、急停、电源断电等各种需要制动的工况下,通过制动电阻能耗实现电机制动,缩短伺服电机的机械进给。
3.目前大多数的伺服驱动器中,当电机制动时,电机所产生的能量通过制动电路消耗在制动电阻上,如果制动系统损坏,导致能量不能及时释放,将会导致工作设备异常。如果电机转速较快,转矩较大,会导致制动电阻温度过高,影响电阻使用寿命。
4.现有制动方法主要是从电机u/v/w相分别引出制动电阻,通过继电器控制通断。当开始制动时,继电器吸合,电机转子中动能通过串接的三个电阻转换成热能泄放。
5.然而,如上所述的现有技术存在如下缺点:1.需要硬件上额外的动态制动电路,体积大、成本高;2.当电机转速较快,转矩较大,会导致制动电阻温度过高,影响电阻使用寿命和使用可靠性。
6.因此,亟需设计一种新的伺服驱动器的动态制动控制方法,以至少部分地缓解或解决现有技术存在的上述不足之处。
技术实现要素:
7.本发明要解决的技术问题是为了克服现有的伺服驱动器的制动控制技术硬件成本偏高且制动电阻使用寿命和可靠性不佳的缺陷,提出一种新的伺服驱动器的动态制动控制方法。
8.本发明是通过采用下述技术方案来解决上述技术问题的:
9.本发明提供了一种伺服驱动器的动态制动控制方法,所述伺服驱动器包括电机以及连接至所述电机的pwm驱动电路,其中,所述pwm驱动电路采用由6个igbt组成的桥式电路,其中,所述6个igbt中的3个组成所述桥式电路的连接至电源正极的上桥臂,另外3个则组成所述桥式电路的连接至电源负极的下桥臂,并且,所述动态制动控制方法包括以下步骤:
10.步骤一、确定所述电机是否开始制动,若开始制动则执行步骤二;
11.步骤二、控制所述上桥臂的3个igbt使其关断,并基于控制策略控制所述下桥臂的3个igbt的开关,以使得所述电机的能量得以通过所述桥式电路泄放,其中,
12.所述控制策略包括如下方式确定的控制参数:基于需要的目标制动时间t、所述igbt的允许最大电流值、以及所述初始转速,确定开关频率f1、初始占空比d0以及占空比的步进增幅
△
d作为所述控制参数。
13.根据本发明的一些实施方式,基于控制策略控制所述下桥臂的3个igbt的开关包括:
14.控制所述下桥臂的3个igbt,以所述开关频率f1从所述初始占空比d0开始进行开关操作,且每次开关操作后占空比增大所述步进增幅
△
d,直到所述电机制动完毕。
15.根据本发明的一些实施方式,控制所述下桥臂的3个igbt的每一次开关操作完成后,以增大所述步进增幅
△
d后的新的占空比再次进行开关操作。
16.根据本发明的一些实施方式,所述初始占空比d0被设置为0,并且所述步进增幅
△
d被设置为一常数。
17.根据本发明的一些实施方式,所述初始占空比d0被设置为处于20%至60%的区间内。
18.根据本发明的一些实施方式,所述初始占空比d0被设置为处于30%至45%的区间内。
19.根据本发明的一些实施方式,采用fpga和/或所述伺服驱动器的驱动芯片执行所述步骤二所包括的确定所述控制策略以及基于所述控制策略控制所述6个igbt的操作。
20.在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
21.本发明的积极进步效果在于:
22.根据本发明的伺服驱动器的动态制动控制方法,通过复用pwm驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可靠性更高,并且基于控制策略可根据实际需要满足不同的制动时间要求。
附图说明
23.图1为根据本发明优选实施例的伺服驱动器的动态制动控制方法适用的伺服驱动器的部分电路示意图。
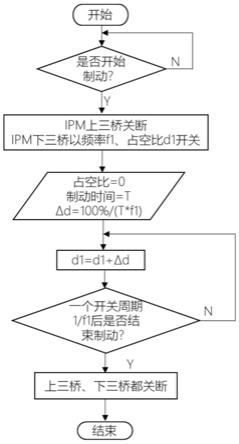
24.图2为根据本发明优选实施例的伺服驱动器的动态制动控制方法的流程示意图。
具体实施方式
25.下面结合说明书附图,进一步对本发明的优选实施例进行详细描述,以下的描述为示例性的,并非对本发明的限制,任何的其他类似情形也都将落入本发明的保护范围之中。
26.在以下的具体描述中,方向性的术语,例如“左”、“右”、“上”、“下”、“前”、“后”等,参考附图中描述的方向使用。本发明各实施例中的部件可被置于多种不同的方向,方向性的术语是用于示例的目的而非限制性的。
27.根据本发明优选实施方式的伺服驱动器的动态制动控制方法适用于如图1所示的这种伺服驱动器。参考图1所示,所述伺服驱动器包括电机以及连接至所述电机的pwm驱动电路,其中,所述pwm驱动电路采用由6个igbt组成的桥式电路,其中,所述6个igbt中的3个(即t1、t2、t3)组成所述桥式电路的连接至电源正极的上桥臂,另外3个(即t4、t5、t6)则组成所述桥式电路的连接至电源负极的下桥臂。
28.其中,参考图2所示,根据本发明优选实施方式的动态制动控制方法包括以下步骤:
29.步骤一、确定所述电机是否开始制动,若开始制动则执行步骤二;
30.步骤二、控制所述上桥臂的3个igbt使其关断,并基于控制策略控制所述下桥臂的3个igbt的开关,以使得所述电机的能量得以通过所述桥式电路泄放,其中,
31.所述控制策略包括如下方式确定的控制参数:基于需要的目标制动时间t、所述igbt的允许最大电流值、以及所述初始转速,确定开关频率f1、初始占空比d0以及占空比的步进增幅
△
d作为所述控制参数。
32.其中,在开始制动时的转速是在制定制动占空比策略的时候需要考虑的制约因素,可选地,可将这一转速取为所述电机的最大转速,默认电机在最大转速下开始制动,亦即执行最为严格的制动条件。
33.根据本发明的一些优选实施方式,基于控制策略控制所述下桥臂的3个igbt的开关包括:
34.控制所述下桥臂的3个igbt,以所述开关频率f1从所述初始占空比d0开始进行开关操作,且每次开关操作后占空比增大所述步进增幅
△
d,直到所述电机制动完毕。
35.本发明的各优选实施方式总体上基于这样一种创新构思,即,当电机运行过程中突然发生异常情况时,由于电机仍在旋转,定子绕组上的感应电动势依旧存在,因此电机无法立即停转,此时将电机驱动igbt的上桥臂截止、下桥臂导通(当然若反之,上桥臂导通、下桥臂截止,也同样是可行的),则电机的定子绕组短路,产生的短路电流将电机的转子上的机械能通过定子电阻泄放成热能,从而缩短了制动时间。在此基础上进一步地,为了防止制动电流过大而损坏igbt,采用具有脉冲开关以及占空比逐渐递增的特点的控制策略。
36.参考图1所示,当电机正常运行时,6个igbt正常开关,当开始制动时,上桥臂的igbt(t1-t3)关断,下桥臂的igbt(t4-t6)开通,电机上的能量通过电机绕组、下桥臂和上桥臂的续流二极管泄放,电路组成及电流流向如图1所示。
37.根据本发明的一些优选实施方式,控制所述下桥臂的3个igbt的每一次开关操作完成后,以增大所述步进增幅
△
d后的新的占空比再次进行开关操作。
38.其中,可以理解的是,驱动器可从上位的控制器收到一个kill信号来判断是否已经开始制动,只要这个kill信号还在,就算占空比加到100%,该电机依旧保持制动。
39.根据本发明的一些优选实施方式,所述初始占空比d0被设置为0,并且所述步进增幅
△
d被设置为一常数。
40.采用fpga和/或所述伺服驱动器的驱动芯片执行所述步骤二所包括的确定所述控制策略以及基于所述控制策略控制6个igbt,t1-t6可以例如由fpga以及驱动芯片控制其操作,即控制器开启或关闭。
41.根据本发明的一些优选实施方式,所述初始占空比d0被设置为处于20%至60%的区间内。
42.进一步优选地,所述初始占空比d0被设置为处于30%至45%的区间内。
43.就本发明的上述优选实施方式中描述的控制策略而言,参考图2所示,在该控制策略中,以f1为频率的脉冲开关的占空比d1,在目标制动时间t内从例如0%(当然也可能是其他的初始占空比例如30%)逐渐增加到100%。这可以根据实际情况的不同而变更操作。
44.例如,当目标制动时间要求较短,则占空比变化的设计可以不从0%开始线性增加到100%,而是可以提高占空比的初始值或者提高其增大的速度或幅度。初始占空比d0和开关频率f1主要受igbt开通允许最大电流和制动开启时刻电机转速两个因素的制约。
45.在根据本发明的上述优选实施方式的一应用实例中,igbt开通所允许的最大电流为100a,而额定电流为75a。电机在额定转速3000rpm下开始制动,实测三相电流在0.2ms内从75a突增到100a,则可将首个制动脉冲的时间宽度(即d1/f1)设置在≤0.2ms即可,即如果选择开关频率f1=2khz,则初始占空比d0可设为40%,从而在保证安全性的前提下更有效地利用了制动时间,或者在保证安全性的前提下缩短制动时间。
46.根据本发明上述优选实施方式的伺服驱动器的动态制动控制方法,通过复用pwm驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可靠性更高,并且基于控制策略可根据实际需要满足不同的制动时间要求。
47.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,而且这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。