技术特征:
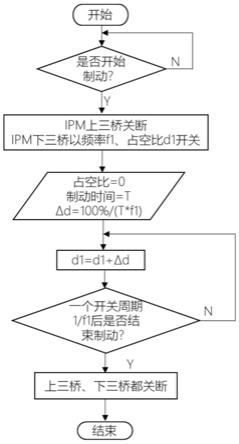
1.一种伺服驱动器的动态制动控制方法,所述伺服驱动器包括电机以及连接至所述电机的pwm驱动电路,其特征在于,所述pwm驱动电路采用由6个igbt组成的桥式电路,其中,所述6个igbt中的3个组成所述桥式电路的连接至电源正极的上桥臂,另外3个则组成所述桥式电路的连接至电源负极的下桥臂,并且,所述动态制动控制方法包括以下步骤:步骤一、确定所述电机是否开始制动,若开始制动则执行步骤二;步骤二、控制所述上桥臂的3个igbt使其关断,并基于控制策略控制所述下桥臂的3个igbt的开关,以使得所述电机的能量得以通过所述桥式电路泄放,其中,所述控制策略包括如下方式确定的控制参数:基于需要的目标制动时间t、所述igbt的允许最大电流值、以及所述初始转速,确定开关频率f1、初始占空比d0以及占空比的步进增幅
△
d作为所述控制参数。2.如权利要求1所述的伺服驱动器的动态制动控制方法,其特征在于,基于控制策略控制所述下桥臂的3个igbt的开关包括:控制所述下桥臂的3个igbt,以所述开关频率f1从所述初始占空比d0开始进行开关操作,且每次开关操作后占空比增大所述步进增幅
△
d,直到所述电机制动完毕。3.如权利要求2所述的伺服驱动器的动态制动控制方法,其特征在于,控制所述下桥臂的3个igbt的每一次开关操作完成后,以增大所述步进增幅
△
d后的新的占空比再次进行开关操作。4.如权利要求3所述的伺服驱动器的动态制动控制方法,其特征在于,所述初始占空比d0被设置为0,并且所述步进增幅
△
d被设置为一常数。5.如权利要求3所述的伺服驱动器的动态制动控制方法,其特征在于,所述初始占空比d0被设置为处于20%至50%的区间内。6.如权利要求6所述的伺服驱动器的动态制动控制方法,其特征在于,根据本发明的一些实施方式,所述初始占空比d0被设置为处于30%至45%的区间内。7.如权利要求1-6所述的伺服驱动器的动态制动控制方法,其特征在于,采用fpga和/或所述伺服驱动器的驱动芯片执行所述步骤二所包括的确定所述控制策略以及基于所述控制策略控制所述6个igbt的操作。
技术总结
本发明公开了一种伺服驱动器的动态制动控制方法,其包括:以下步骤:确定电机是否开始制动,若开始制动则继续以下步骤;控制上桥臂的3个IGBT使其关断,并基于控制策略控制下桥臂的3个IGBT的开关,以使得电机的能量得以通过桥式电路泄放,其中,控制策略包括如下方式确定的控制参数:基于需要的目标制动时间、IGBT的允许最大电流值、以及初始转速,确定开关频率、初始占空比以及占空比的步进增幅作为控制参数。根据本发明的伺服驱动器的动态制动控制方法,通过复用PWM驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可靠性更高,并且基于控制策略可根据实际需要满足不同的制动时间要求。不同的制动时间要求。不同的制动时间要求。
技术研发人员:奚乐菲 袁再松
受保护的技术使用者:上海铼钠克数控科技有限公司
技术研发日:2021.11.25
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。