1.在本说明书中公开了对基板作业系统。
背景技术:
2.以往,已知有对配置于xy平面的基板进行作业的对基板作业系统。例如,在专利文献1中,作为这样的对基板作业系统,已知有具备在xy平面上移动的头、向基板照射光的照明装置及用于对由照明装置照射了光的基板进行拍摄的相机的系统。另一方面,作为图像取得系统,如专利文献2所示,已知有为了生成合成图像而取得第一个光学图像和第二个光学图像的系统。合成图像是彩色图像,第一个光学图像和第二个光学图像分别由合成彩色图像的颜色成分构成。
3.现有技术文献
4.专利文献1:日本特开2002-271099号公报
5.专利文献2:日本特开2004-191355号公报
技术实现要素:
6.发明所要解决的课题
7.然而,在对基板作业系统中,根据由相机拍摄的对象物,有时能够通过黑白图像来进行识别,有时无法进行识别。考虑到这一点,也可以想到取得对象物的彩色图像并利用该彩色图像来识别对象物。在该情况下,大多将四个像素作为一个单元来生成颜色信息,但是由于出现渗色或伪色这样的现象,因此难以高精度地识别对象物。另一方面,在合成分别照射rgb的光并由单色相机取得的三个黑白图像而生成彩色图像的情况下,能够得到消除了渗色合伪色这样的现象的高分辨率的彩色图像。然而,由于无论何种对象物都是合成三个黑白图像而生成彩色图像,因此对于即使是黑白图像也能够充分识别那样的对象物,存在拍摄时间无谓地变长这样的问题。
8.本说明书中公开的对基板作业系统为了解决上述课题而作出,其主要目的在于根据需要适当地区分使用是利用高分辨率的合成图像还是利用单色图像。
9.用于解决课题的技术方案
10.本说明书中公开的对基板作业系统是对配置于xy平面的基板进行作业的对基板作业系统,
11.上述对基板作业系统具备:
12.移动装置,在上述xy平面上移动;
13.照明装置,安装于上述移动装置,能够对上述xy平面上的对象物独立地照射r、g、b中的至少两种单色光;
14.单色相机,安装于上述移动装置,取得由上述照明装置照射的上述对象物的单色图像;及
15.图像处理装置,基于上述对象物,从上述至少两种单色光中选择一种或者多种单
色光,若所选择出的上述单色光为一种,则以取得由上述一种单色光照射的上述对象物的单色图像的方式控制上述照明装置及上述单色相机,并且将上述对象物的单色图像设定为对象物检查用图像,若所选择出的上述单色光为多种,则以取得由上述多种单色光分别独立地照射的上述对象物的各单色图像的方式控制上述照明装置及上述单色相机,并且将合成上述各单色图像而得到的合成图像设定为上述对象物检查用图像。
16.在该对基板作业系统中,基于对象物,从至少两种单色光中选择一种或多种单色光,若所选择出的单色光为一种,则以取得由一种单色光照射的对象物的单色图像的方式控制照明装置及单色相机,并且将对象物的单色图像设定为对象物检查用图像。若所选择出的单色光为多种,则以取得由多种单色光分别独立地照射的对象物的各单色图像的方式控制照明装置及单色相机,并且将合成各单色图像而得到的合成图像设定为对象物检查用图像。由于合成图像针对每个像素得到颜色信息,因此与将排列成正方形状的四个像素作为一个单元来生成颜色信息的情况相比,成为消除了渗色或伪色这样的现象的高分辨率的图像,但是由于需要进行多次拍摄,因此拍摄花费时间。在此,作为对象物检查用图像,基于对象物来选择是使用一个单色图像还是使用合成图像。也就是说,能够根据对象物适当地区分使用是利用一个单色图像还是利用高分辨率的合成图像。因此,与针对全部对象物使用合成图像来作为对象物检查用图像的情况相比,处理时间缩短。
17.另外,对象物检查用图像既可以被利用于由图像处理装置进行的对象物的自动检查,也可以是为了操作者进行对象物的检查而通过图像处理装置显示于显示器。
附图说明
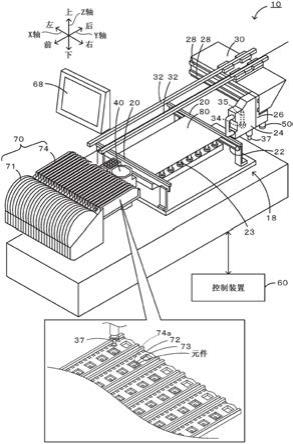
18.图1是元件安装机10的立体图。
19.图2是标记相机50的结构的概略说明图。
20.图3是落射光源53的a视图。
21.图4是侧射光源55的b视图。
22.图5是表示与元件安装机10的控制相关的结构的框图。
23.图6是具有基准标记81的基板80的俯视图。
24.图7是具有块跳过标记83的基板80的俯视图。
25.图8是表示检查例程的一个例子的流程图。
26.图9是安装有元件p1、p2、p3后的基板80的俯视图。
27.图10是表示另一检查例程的一个例子的流程图。
具体实施方式
28.以下,参照附图对在本说明书中公开的元件安装机的优选的实施方式进行说明。图1是元件安装机10的立体图,图2是标记相机50的结构的概略说明图,图3是落射光源53的a视图,图4是侧射光源55的b视图,图5是表示与元件安装机10的控制相关的结构的框图。另外,在本实施方式中,左右方向(x轴)、前后方向(y轴)及上下方向(z轴)如图1所示。
29.元件安装机10具备:基板输送装置18、头24、吸嘴37、零件相机40、标记相机50、显示器68、卷盘单元70及控制装置60。
30.基板输送装置18是输送或者保持基板80的装置。该基板输送装置18具备支撑板
20、20和传送带22、22(在图1中仅图示出单方)。支撑板20、20是沿着左右方向延伸的部件,在图1中的前后隔开间隔地设置。传送带22、22以形成为环状的方式架设在设于支撑板20、20的左右的驱动轮及从动轮。基板80被放置于一对传送带22、22的上表面而被从左向右输送。该基板80能够由多个立设的支撑销23从背面侧支撑。因此,基板输送装置18也起到作为基板支撑装置的作用。
31.头24安装于x轴滑动件26的前表面。x轴滑动件26安装于y轴滑动件30的前表面。y轴滑动件30以能够滑动的方式安装于沿着前后方向延伸的左右一对导轨32、32。在y轴滑动件30的前表面设有沿着左右方向延伸的上下一对导轨28、28。x轴滑动件26以能够滑动的方式安装于该导轨28、28。头24伴随着x轴滑动件26在左右方向上移动而在左右方向上移动,伴随着y轴滑动件30在前后方向上移动而在前后方向上移动。另外,各滑动件26、30分别由驱动马达26a、30a(参照图5)驱动。另外,头24内置有z轴马达34,通过z轴马达34来调整安装于沿着z轴延伸的滚珠丝杠35的吸嘴37的高度。此外,头24内置有使吸嘴37轴旋转的q轴马达36(参照图5)。
32.吸嘴37是将元件吸附并保持于吸嘴前端或者对吸附于吸嘴前端的元件进行吸附解除的部件。吸嘴37能够由未图示的压力供给源供给压力,例如,若被供给负压则吸附元件,若停止供给负压或者被供给正压则对元件进行吸附解除。吸嘴37从头24的主体底面向下方突出。另外,通过利用z轴马达34使吸嘴37沿z轴方向进行升降来调整吸附于吸嘴37的元件的高度。通过利用q轴马达36使吸嘴37旋转来调整吸附于吸嘴37的元件的方向。
33.零件相机40配置于基板输送装置18的前方。零件相机40的上方是拍摄范围,零件相机40从下方对保持于吸嘴37的元件进行拍摄而生成拍摄图像。
34.标记相机50设于x轴滑动件26的下表面。标记相机50从上方对对象物(拍摄对象物)进行拍摄而生成拍摄图像。作为标记相机50的对象物,可列举在卷盘单元70中从供料器74送出的带72所保持的元件、附设于基板80上的标记、安装于基板80上的元件、印刷于基板80上的焊料等。
35.如图2所示,标记相机50具备照明装置51和相机主体58。照明装置51具备:壳体52、落射光源53、半透半反镜54及侧射光源55。壳体52是在下表面开口的圆筒状的部件,安装于相机主体58的下方。落射光源53设于壳体52的内侧的侧面。如图3所示,落射光源53是在四边形状的支撑板53d上分别配置有相同数量或者大致相同数量的发出r(红色)的单色光的红色led53a、发出g(绿色)的单色光的绿色led53b及发出b(蓝色)的单色光的蓝色led53c而成的光源。各led53a~53c在中央配置有发光元件的四边形状的基座上以覆盖该发光元件的方式安装有半球面的透镜。半透半反镜54以倾斜的方式设于壳体52的内侧。半透半反镜54将来自落射光源53的led53a、53b、53c的水平方向上的光向下方反射。另外,半透半反镜54使来自下方的光朝相机主体58透过。侧射光源55以成为水平的方式设于壳体52的下方开口附近。如图4所示,侧射光源55是在环状的支撑板55d上分别配置有相同数量或者大致相同数量的红色led55a、绿色led55b及蓝色led55c而成的光源,向下照射光。各led55a~55c在中央配置有发光元件的四边形状的基座上以覆盖该发光元件的方式安装有半球面的透镜。在壳体52中的侧射光源55的下方设有扩散板56。从落射光源53及侧射光源55发出的光最终被该扩散板56扩散后向对象物照射。相机主体58基于接收到的光来生成拍摄图像。该相机主体58具备未图示的透镜等光学系统及拍摄元件(例如ccd)。当从落射光源53及侧射
源55发出并被对象物反射后的光透过半透半反镜54而到达相机主体58时,相机主体58接收该光而生成拍摄图像。
36.另外,r、g、b各颜色的波长区域不作特别限定,例如,也可以将r设为590nm-780nm,将g设为490nm-570nm,将b设为400nm-490nm。
37.显示器68对各种图像进行彩色显示或者单色显示。
38.卷盘单元70是以可拆装的方式安装有多个供料器74的单元。供料器74具备卷盘71。在卷盘71上卷绕有带72。在带72的表面沿着带72的长度方向设有多个收纳凹部73。在各收纳凹部73中收纳有元件。这些元件被覆盖带72的表面的膜保护。这样的带72被从卷盘71向后方退卷,在供料器74的预定的元件供给位置74a处剥离膜而成为元件露出的状态。被送出至预定的元件供给位置74a的元件被吸嘴37吸附。卷盘单元70的动作由各供料器74具备的供料器控制器76(参照图5)控制。
39.如图5所示,控制装置60具备cpu61、存储部63(rom、ram、hdd等)、输入输出接口65等,它们经由总线66而连接。该控制装置60向基板输送装置18、x轴滑动件26的驱动马达26a、y轴滑动件30的驱动马达30a、z轴马达34、q轴马达36、零件相机40、标记相机50、显示器68及吸嘴37用的未图示的压力供给源输出驱动信号。另外,控制装置60输入来自零件相机40的拍摄图像和来自标记相机50的拍摄图像。控制装置60与卷盘单元70的供料器控制器76以能够通信的方式连接。另外,虽未图示,但是在各滑动件26、30装备有未图示的位置传感器,控制装置60一边输入来自这些位置传感器的位置信息,一边对各滑动件26、30的驱动马达26a、30a进行控制。
40.在此,对基板80进行说明。图6所示的基板80具有基准标记81。基准标记81是设于基板80的对角的两处角的标记,被用于修正基板80的姿势(位置和倾斜)等。在此,基准标记81被制成为通过使用在由r的单色光照射时拍摄到的单色图像而能够明确地识别为基板80。另外,图7所示的基板80具有块跳过标记83。块跳过标记83是用于在基板80以可取为多个小基板(基板块82)的方式形成的情况下表示基板块82是良好块还是不良块的标记。因此,块跳过标记83被制成为能够区别表示是良好块的标记(在图8中为白色的标记)和表示是不良块的标记(在图8中为黑色的标记)。在此,块跳过标记83被制成为通过使用在由r的单色光照射时拍摄到的单色图像而能够明确地识别为基板80。也就是说,基准标记81和块跳过标记83也基于该标记81、83和作为背景的基板80的识别性而选择r的单色光。
41.接着,对元件安装机10进行元件安装处理时的动作进行说明。控制装置60的cpu61基于从未图示的管理装置接收到的生产程序,对元件安装机10的各部进行控制而生产安装有多个种类、多个元件的基板80。具体而言,cpu61控制x轴滑动件26和y轴滑动件30,以使吸嘴37与通过作为元件供给装置的卷盘单元70送出至元件供给位置74a的元件相向。接着,cpu61控制吸嘴37的压力,以使元件供给位置74a的元件被吸附于吸嘴37。接着,cpu61以拍摄吸附于吸嘴37的元件的图像的方式控制零件相机40,并基于得到的元件的图像来识别元件的姿势。接着,cpu61以考虑吸附于吸嘴37的元件的姿势而将元件配置于基板80的指定位置的正上方的方式控制x轴滑动件26及y轴滑动件30,以使吸嘴37释放元件的方式控制吸嘴37的压力。cpu61通过反复执行这样的元件安装处理而向基板80上安装预定数量、种类的元件。通过将这样的元件安装机10在左右方向上排列多台而形成安装线。当基板80被从一个安装线的最上游的元件安装机10输送至最下游的元件安装机10时,在基板80上安装预定的
全部元件。
42.接着,对元件安装机10进行对象物的检查时的动作进行说明。图8是表示检查例程的一个例子的流程图。控制装置60的cpu61在开始检查例程时,首先基于对象物选择单色光(s100)。例如,若对象物是基准标记81(参照图6),则cpu61从r、g、b这三种单色光中选择r的单色光。在对象物为块跳过标记83(参照图7)的情况下,也相同地选择r的单色光。如上所述,基准标记81和块跳过标记83均能够在照射r的单色光而拍摄到的单色图像中明确地区别于基板80(背景)。另一方面,若对象物是图9所示的元件安装结束后的基板80(例如元件安装机10所负责的全部元件的安装结束后的基板80)上的元件,则cpu61从r、g、b这三种单色光中选择全部的单色光。在图9的基板80上安装有三种元件p1、p2、p3,元件p1安装有两个,元件p2安装有六个,元件p3安装有一个。在由r、g、b中的任意一种单色光照射该基板80上的元件p1、p2、p3而拍摄到的单色图像中,无法将全部元件p1、p2、p3明确地区别于基板80(背景),在对r、g、b各自的单色图像进行合成而到的合成图像(彩色图像)中,能够相对于基板80明确地识别全部元件p1、p2、p3。也就是说,基于元件p1、p2、p3与作为其背景的基板80之间的识别性,选择rgb全部的单色光。
43.接着,cpu61以拍摄由所选择出的单色光照射的对象物的单色图像的方式(s110)控制标记相机50(即照明装置51及相机主体58),并从标记相机50输入拍摄到的单色图像(s120)。例如对象物为基准标记81、块跳过标记83的情况那样,若所选择出的单色光是r的单色光,则cpu61以取得由r的单色光照射的对象物的单色图像的方式控制标记相机50,并从标记相机50输入该单色图像。另一方面,如对象物为图9所示的元件安装结束后的基板80上的元件p1、p2、p3的情况那样,若所选择出的单色光是r、g、b全部的单色光,则cpu61以依次取得由r的单色光照射的元件p1、p2、p3的单色图像、由g的单色光照射的元件p1、p2、p3的单色图像及由b的单色光照射的元件p1、p2、p3的单色图像的方式控制标记相机50,并从标记相机50输入这些单色图像。在通过单色光照射对象物时,通常使用照明装置51的侧射光源55,但是在对象物具有如金属面那样的光泽面的情况下,使用落射光源53。
44.接着,cpu61设定对象物检查用图像(s130)。例如对象物为基准标记81、块跳过标记83的情况那样,在cpu61从标记相机50输入了由r的单色光照射的对象物的单色图像的情况下,将该单色图像设定为对象物检查用图像。另一方面,如对象物为图9所示的元件安装结束后的基板80上的元件p1、p2、p3的情况那样,在cpu61从标记相机50输入了由r、g、b的单色光分别独立地照射的对象物的单色图像的情况下,合成这些单色图像而生成合成图像(彩色图像),将该合成图像设定为对象物检查用图像。
45.在此,对本实施方式中生成的彩色图像进行说明。根据由r的单色光照射的对象物的黑白图像,针对每一个像素得到以多级的灰度(例如256灰度)表示r的亮度的信息。根据由g的单色光照射的对象物的黑白图像,针对每一个像素得到以多级的灰度表示g的亮度的信息。根据由b的单色光照射的对象物的黑白图像,针对每一个像素得到以多级的灰度表示b的亮度的信息。由于能够根据这些信息得到每一个像素的rgb的信息,因此能够生成彩色图像。由于这样生成的彩色图像是针对每一个像素得到rgb的信息的,因此与将排列成正方形状的四个像素作为一个单元(例如将在一个对角线上排列有r和b、在另一个对角线上排列有g和g的单元作为一个单元)而生成颜色信息的情况相比,能够得到消除了渗色和伪色这样的现象的高分辨率的彩色图像。
46.接着,cpu61使用对象物检查图像来执行对象物的检查(s140)。例如对象物为基准标记81或块跳过标记83的情况那样,在由r的单色光照射的单色图像被设定为对象物检查用图像的情况下,使用该单色图像来检查基准标记81或块跳过标记83的位置。基准标记81或块跳过标记83的位置的检查是在向基板80安装元件之前进行的。由于通过检查基准标记81的位置而根据该位置知道基板80的姿势,因此能够考虑该姿势而高精度地进行之后的元件安装。通过检查块跳过标记83的位置,能够跳过不良的基板块82而进行元件安装。另外,在无法识别基准标记81或块跳过标记83的位置的情况下、超出允许范围而从本来的位置偏离的情况下,设为错误,该基板80不进行元件安装而排出。另一方面,如对象物为图9所示的元件安装结束后的基板80上的元件p1、p2、p3的情况那样,在将彩色图像设定为对象物检查用图像的情况下,使用该彩色图像来检查元件p1、p2、p3的位置。如上所述,由于在本实施方式中得到的彩色图像是消除了渗色和伪色这样的现象的高分辨率的彩色图像,因此能够高精度地识别元件p1、p2、p3的位置,其结果是,检查的精度提高。另外,在无法识别元件p1、p2、p3的位置的情况下、超出允许范围而从本来的位置偏离的情况下,设为错误,将该基板80废弃。
47.接着,cpu61将与检查结果对应的图像保存于存储部63(s150),并使本例程结束。例如,在对象物为基准标记81或块跳过标记83的情况下,若未成为错误,则将被照射了r的单色光的对象物的单色图像保存于存储部63。此时,也可以对单色图像进行压缩并保存。这是因为无需详细地研究没有成为错误的情况下的图像。另一方面,在对象物为基准标记81或块跳过标记83的情况下,若成为错误,则以拍摄由其他(即g及b的)单色光分别独立地照射的对象物的单色图像的方式控制标记相机50,将r、g、b各自的单色图像保存于存储部63。由此,通过之后调查r、g、b各自的单色图像,能够追究错误发生的原因。此时,也可以取代将r、g、b各自的单色图像保存于存储部63、或者在此基础上将合成r、g、b各自的单色图像而得到的彩色图像保存于存储部63。另一方面,在图9所示的对象物为元件安装结束后的基板80上的元件p1、p2、p3的情况下,若未成为错误,则将彩色图像保存于存储部63。此时,也可以对彩色图像进行压缩并保存。这是因为无需详细地研究没有成为错误的情况下的图像。另一方面,在对象物为元件安装结束后的基板80(参照图9)上的元件p1、p2、p3的情况下,若成为错误,则不压缩彩色图像而保存于存储部63。由此,能够通过之后调查彩色图像来追究发生错误的原因。此时,也可以取代将彩色图像保存于存储部63、或者在此基础上将r、g、b各自的单色图像保存于存储部63中。
48.在此,对本实施方式的构成要素与本说明书所公开的对基板作业系统的构成要素之间的对应关系进行说明。本实施方式的元件安装机10相当于本说明书所公开的对基板作业系统,x轴滑动件26及y轴滑动件30相当于移动装置,照明装置51相当于照明装置,相机主体58相当于单色相机,控制装置60相当于图像处理装置。另外,显示器68相当于图像显示装置,存储部63相当于存储装置。
49.在以上说明的本实施方式中,作为对象物检查用图像,基于对象物来选择是使用一个单色图像还是合成图像。即,能够根据对象物适当地区分使用是使用一个单色图像还是利用高分辨率的合成图像。因此,与针对全部对象物使用合成图像来作为对象物检查用图像的情况相比,处理时间缩短。
50.另外,基于对象物相对于对象物的背景的识别性,决定是从rgb这三种单色光中选
择一种单色光还是选择全部单色光。因此,在检查对象物的基础上选择适当的图像。
51.此外,cpu61基于对象物检查用图像中的对象物的图像识别的结果,判定对象物的合格与否,在判定为对象物不合格的情况下,将对象物的r、g、b这三种单色光的全部单色图像及/或者合成全部单色图像而得到的合成图像保存于存储部63。因此,对于判定为不合格的对象物,能够之后从存储部63读出该对象物的全部单色图像及/或者合成图像(彩色图像)来追究不合格的原因。此时,在未集齐对象物的r、g、b这三种单色光的全部单色图像的情况下,取得不足的单色图像并保存。
52.另外,本发明不受上述实施方式的任何限定,只要属于本发明的技术范围,就能够以各种方式实施,这是不言而喻的。
53.例如,也可以取代上述实施方式的检查例程而执行图10的检查例程。在图10的检查例程中,控制装置60的cpu61首先判定是否存在与对象物相关联的事项的变化(s200)。作为与对象物相关联的事项的变化,例如可列举作为对象物的元件的形状数据的变更、供给该元件的供料器74的更换、吸附该元件的吸嘴37的更换、该元件的制造公司或制造批次的变更等。若在s200中不存在与对象物相关联的事项的变化,则cpu61执行上述s100~s150的处理,并使本例程结束。另一方面,若在s200中存在与对象物相关联的事项的变化,则与对象物无关地,cpu61以拍摄由rgb全部的单色光各自照射的对象物的单色图像的方式控制标记相机50(s210),并从标记相机50输入拍摄到的单色图像(s220)。接着,cpu61设定对象物检查用图像(s230)。在此,cpu61合成从标记相机50输入的由r、g、b各自的单色光独立照射的对象物的单色图像而生成合成图像(彩色图像),并将该合成图像设定为对象物检查用图像。然后,cpu61执行与上述s140及s150相同的s240及s250的处理,并使本例程结束。在s250中,若检查结果未成为错误,则cpu61压缩合成图像并保存于存储部63,若检查结果成为错误,则不压缩合成图像而保存于存储部63。这样一来,由于在与对象物相关联的事项发生了变化的情况下,发生错误的概率较高,因此能够在之后从存储部63读出该对象物的合成图像(彩色图像)并根据该事项的变化来详细地追究对对象物造成怎样的影响。另外,若检查结果成为错误,则cpu61也可以取代将合成图像保存于存储部63、或者在此基础上将r、g、b各自的单色图像保存于存储部63。即使是这样,也能够在之后从存储部63读出该对象物的全部单色图像及或者合成图像(彩色图像),根据该事项的变化,详细地追究对对象物造成怎样的影响。
54.在上述实施方式中,基于对象物选择单色光,拍摄由所选择出的单色光照射的单色图像,但是在生成用于通过元件安装机10的显示器68进行编辑的机上编辑用图像的情况下,也可以与对象物无关地对rgb三色的单色图像进行拍摄并对它们进行合成而生成合成图像(彩色图像),并显示于显示器68。
55.在上述实施方式中,也可以是,在生产开始时拍摄由rgb各自的单色光独立照射的对象物的单色图像,在rgb的单色图像中存在能够从对象物的背景中良好地识别对象物的特征点的图像的情况下,使该单色图像的单色光与该对象物建立对应,在任意的单色图像中均无法良好地看到对象物的特征点的情况下,以得到合成各单色图像而得到的合成图像(彩色图像)的方式使全部单色光与该对象物建立对应。该建立对应作业既可以由控制装置60的cpu61进行,也可以由操作者进行。另外,也可以在生产开始后经过预定期间之前,在检查例程的s100中,与对象物无关地选择全部单色光,之后进行该建立对应作业。在进行了建
立对应作业之后,在检查例程的s100中,选择与该对象物建立了对应的单色光即可。
56.在上述实施方式的检查例程中,也可以是,即使在选择了某一种单色光的对象物的情况下,也定期地合成由r、g、b各自的单色光独立照射的对象物的单色图像,并保留该合成图像(彩色图像)。
57.在上述实施方式中,也可以是,将对象物设为收纳于卷盘单元70的带72的收纳凹部73的元件。另外,作为元件安装机10的元件供给装置,示例了卷盘单元70,但是不特别限定于此,例如,也可以采用在托盘上载置元件而供给的托盘单元。在该情况下,也可以将对象物设为载置于托盘的元件。
58.在上述实施方式中,照明装置51能够独立地照射rgb这三中颜色,但是也可以独立地照射两种颜色(例如r和g、r和b、g和b)。在该情况下,对于通过一种颜色的单色图像中无法识别的对象物,也可以使用合成由两种颜色的单色光分别独立地照射的对象物的单色图像而得到的合成图像。
59.在上述实施方式中,作为对基板作业系统而示例了元件安装机10,但是不特别限定于此,例如也可以是配置于多个元件安装机10排列而成的安装线的上游的焊料印刷机。焊料印刷机是向安装元件之前的基板80的预定位置印刷焊料的设备,也可以将焊料作为对象物进行上述检查例程。
60.在上述实施方式的检查例程的s130中,也可以是,cpu61在设定了对象物检查用图像之后将该对象物检查用图像显示于显示器68。这样一来,操作者能够观察显示在显示器68上的对象物检查用图像来进行对象物的检查。在该情况下,也可以省略s140及s150的处理。
61.在上述实施方式中,使用了具备一个吸嘴37的头24,但是也可以使用沿着圆柱形状的头主体的外周等间隔地具备多个吸嘴的旋转头。
62.在上述实施方式中,作为吸附保持元件的部件而示例了吸嘴37,但是不特别限定于此,也可以取代吸嘴37而具备例如机械卡盘或电磁铁。
63.本说明书中公开的对基板作业系统也可以如以下这样构成。
64.在本说明书中公开的对基板作业系统中,也可以是,上述图像处理装置将上述对象物检查用图像显示于图像显示装置。这样一来,操作者能够通过观察图像显示装置来确认对象物检查用图像。
65.在本说明书中公开的对基板作业系统中,也可以是,上述图像处理装置基于上述对象物相对于上述对象物的背景的识别性,来从上述至少两种单色光中选择一种或者多种单色光。这样一来,在检查对象物的基础上选择恰当的图像。例如,在被照射了某一种单色光的对象物的单色图像中能够从对象物的背景识别对象物的情况下,选择该一种单色光即可,在即使被照射了任意单色光的对象物的单色图像中均无法从对象物的背景识别对象物,但是在合成图像中能够识别的情况下,选择与生成该合成图像所需的单色图像对应的多种单色光即可。
66.在本说明书中公开的对基板作业系统中,也可以是,上述照明装置能够对上述对象物独立地照射r、g、b这三种单色光,上述图像处理装置基于上述对象物来从上述r、g、b这三种单色光中设定一种单色光、或者选择全部单色光。这样一来,合成图像成为合成rgb的各单色图像而得到的彩色图像。
67.在本说明书中公开的对基板作业系统中,也可以是,上述图像处理装置基于上述对象物检查用图像中的上述对象物的图像识别的结果来判定上述对象物的合格与否,在上述对象物为不合格的情况下,将上述对象物的r、g、b这三种单色光的全部单色图像及/或合成上述全部单色图像而得到的合成图像保存于存储装置中。这样一来,对于判定为不合格的对象物,能够之后从存储装置读出该对象物的全部单色图像及/或者合成图像(彩色图像)并追究不合格的原因。此时,在未集齐对象物的r、g、b这三种波长的全部单色图像的情况下,也可以针对不足的单色图像用单色相机进行拍摄。或者,
68.在本说明书中公开的对基板作业系统中,也可以是,上述图像处理装置在与上述对象物相关联的事项发生了变化的情况下,将上述对象物的r、g、b这三种单色光的全部单色图像及/或合成上述全部单色图像而得到的合成图像保存于存储装置中。这样一来,在与对象物相关联的事项发生了变化的情况下,能够之后从存储装置读出该对象物的全部单色图像及/或者合成图像(彩色图像),根据该事项的变化来追究对对象物造成怎样的影响。此时,在未集齐对象物的r、g、b这三种波长的全部单色图像的情况下,也可以针对不足的单色图像用单色相机进行拍摄。作为与对象物相关联的事项发生了变化的情况,例如可列举当将对象物设为向基板安装的元件时,该元件的形状数据被变更的情况、在用于供给该元件的元件供给装置、吸嘴被更换的情况、该元件的制造公司或批次被变更的情况等。
69.在本说明书中公开的对基板作业系统中,也可以是,上述对象物是附设于上述基板上的标记、安装于上述基板上的元件、配置于向上述基板供给元件的元件供给装置上的元件或者印刷于上述基板上的焊料。
70.产业上的可利用性
71.本发明能够应用于伴随着向基板安装元件的作业的产业。
72.附图标记说明
73.10、元件安装机;18、基板输送装置;20、支撑板;22、传送带;23、支撑销;24、头;26、x轴滑动件;26a、驱动马达;28、导轨;30、y轴滑动件;30a、驱动马达;32、导轨;34、z轴马达;35、滚珠丝杠;36、q轴马达;37、吸嘴;40、零件相机;50、标记相机;51、照明装置;52、外壳;53、落射光源;53a、红色led;53b、绿色led;53c、蓝色led;53d、支撑板;54、半透半反镜;55、侧射光源;55a、红色led;55b、绿色led;55c、蓝色led;55d、支撑板;56、扩散板;58、相机主体;60、控制装置;61、cpu;63、存储部;65、输入输出接口;66、总线;68、显示器;70、卷盘单元;71、卷盘;72、带;73、收纳凹部;74、供料器;74a、元件供给位置;76、供料器控制器;80、基板;81、基准标记;82、基板块;83、块跳过标记;p1、p2、p3、元件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。