1.本发明涉及清淤机器人领域,尤其涉及一种多用途小型水下清淤机器人。
背景技术:
2.随着城市规模日益扩大,城市下水管网不断延伸膨胀。城市排水系统是否畅通,不仅关乎城市防洪排涝,更直接影响着广大市民的日常生活和身心健康。目前国内城市常用的下管道清淤方法有:绞车清淤法、高压水射流清淤法和水冲清淤法,其中绞车清淤法是最普遍采用的方法,以上这些方法均需要工人井下作业,存在着工作环境恶劣、装配复杂、清淤效果不佳等缺陷。有的地下管道的管径比较小,小的只有二三十公分,大的不过一米左右。由于管道过小,工作人员不方便进入,而且有些管道内还有沼气等有毒气体,给施工带来了安全隐患。
3.并且现有的清淤设备功能单一,只能在特定领域工作,清淤设备得不到最大限度的利用。
技术实现要素:
4.为了解决现有技术中存在的缺点,本发明提供一种多用途小型水下清淤机器人。
5.为了实现上述目的,本发明采用了如下技术方案:一种多用途小型水下清淤机器人,包括清淤装置本体,所述清淤装置本体左右两侧设置有行走履带,所述清淤装置本体前端通过机械臂连接有绞吸清淤刀头,所述清淤装置本体上设置有控制舱,所述控制舱内设置有控制系统,所述控制系统和设置在所述机械臂靠近绞吸清淤刀头处的信息采集装置相连接;并且所述控制系统无线连接地面站遥控系统。
6.优选的,所述控制系统包括第一无线通讯单元、清淤单元、驱动单元、第一信息处理单元。
7.优选的,所述地面站遥控系统包括显示屏,遥控手柄,第二无线通讯单元,第二信息处理单元。所述地面站遥控系统用于实现对所述多用途小型水下清淤机器人的远程控制,其中,显示屏上可以清晰体现所述多用途小型水下清淤机器人的位置信息和所处环境信息,第二无线通讯单元用于向所述控制系统接收和发出信息,第二信息处理单元进行信息处理和发出指令。
8.优选的,所述信息采集装置包括低照度浑水专业相机、水压传感器、温度传感器、姿态传感器。所述信息采集装置用于作业环境的信息采集,方便地面站遥控系统根据采集到的信息发出合适的指令。
9.优选的,所述控制系统还包括有自救援系统,所述自救援系统包括路径记忆模块和自动控制模块以及备用蓄电池。当所述多用途小型水下清淤机器人无法接收到所述地面站遥控系统的指令,或者无法连接所述动力系统时,所述自救援系统开始工作,使所述多用途小型水下清淤机器人能够返回起始点。
10.优选的,所述清淤装置本体四周固定设置有防撞减震装置,所述防撞减震装置包
括第一套管、第二套管、第一连接板、第二连接板、橡胶垫和减震弹簧,所述第一套管固定连接在所述清淤装置本体上,所述第一套管顶部表面插接有第二套管,所述第二套管外表面固定设置有橡胶垫;所述第二套管内腔顶部表面设置有至少一个第一连接板,所述第一套管内腔底部表面固定设置有至少一个第二连接板,所述第一连接板和所述第二连接板通过所述减震弹簧相连接。所述防撞减震装置能够降低所述清淤装置本体在作业时的变形损坏,同时能够保护所述清淤装置本体内部的设备,起到减震的效果。
11.优选的,所述清淤装置本体上设置有吊装组件,所述吊装组件包括吊装链条、拉环、吊钩,所述吊装链条穿过所述拉环,所述吊钩固定设置在所述吊装链条两端,对应的,所述清淤装置本体上设置有固定环,用于连接所述吊钩。当运输设备将所述多用途小型水下清淤机器人运输到工作区域时,所述吊装组件用于将所述多用途小型水下清淤机器人起吊至作业水域。
12.优选的,所述绞吸泵可拆卸设置在所述清淤装置本体内部,和排污软管相连。采用水下泵的形式,使所述绞吸泵吸口接近泥层,清淤工作效率更高,排污软管用于将淤泥排放到指定地点。
13.优选的,所述绞吸清淤刀头可拆卸连接在所述机械臂上,可更换不同类型的刀头。配合可拆卸的所述绞吸泵,能够根据工况需要,选择不同的功能组合,并且可以拆卸后安装于挖掘机上,应用于浅水区域的清淤工程。
14.有益效果:
15.本发明提供一种多用途小型水下清淤机器人,与现有技术相比,该多用途小型水下清淤机器人是一种可以胜任多种工作的潜水工作设备,通过地面站遥控系统实现远程控制,不仅可以在狭小空间代替人工清淤作业,同时具备深水作业能力,特别是针对于有毒有害的环境,远程控制功能可以避免人与危险环境的直接接触从而保障操作人员的人身安全。该多用途小型水下清淤机器人还设置有自救援系统,当无法接收到地面站遥控系统的指令,或者无法连接动力系统时,自救援系统开始工作,使该多用途小型水下清淤机器人能够返回起始点,进行自救援,无需人工对该多用途小型水下清淤机器人进行打捞施救。
附图说明
16.图1为本发明提出的一种多用途小型水下清淤机器人控制系统流程图;
17.图2为本发明提出的一种多用途小型水下清淤机器人主视图;
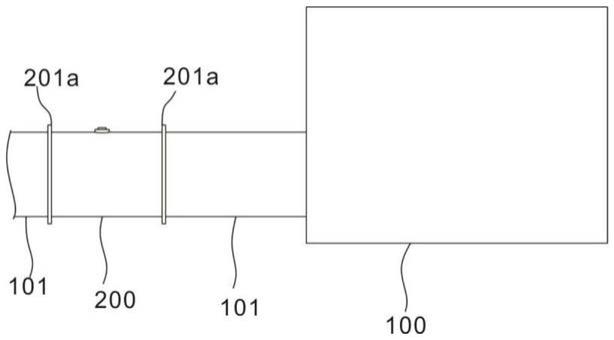
18.图3为本发明提出的一种多用途小型水下清淤机器人防撞减震装置示意图;
19.图中:1-清淤装置本体;11-行走履带;12-机械臂;13-绞吸清淤刀头;14-绞吸泵;15-排污软管;
20.2-控制舱;21-控制系统;211-第一无线通讯单元;212-清淤单元;213-驱动单元;214-第一信息处理单元;215-自救援系统;2151-路径记忆模块;2152-自动控制模块;2153-备用蓄电池;
21.3-地面站遥控系统;31-显示屏;32-遥控手柄;33-第二无线通讯单元;34-第二信息处理单元;
22.4-信息采集装置;41-低照度浑水专业相机;42-水压传感器;43-温度传感器;44-姿态传感器;
23.5-防撞减震装置;51-第一套管;52-第二套管;53-第一连接板;54-第二连接板;55-橡胶垫;56-减震弹簧;
24.6-吊装组件;61-吊装链条;62-拉环;63-吊钩;
25.7-固定环。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.参照图1-图3,本发明提供一种多用途小型水下清淤机器人,包括清淤装置本体1,清淤装置本体1采用的动力是以柴油机为动力的电力液压一体站。清淤装置本体1左右两侧设置有行走履带11,清淤装置本体1前端通过机械臂12连接有绞吸清淤刀头13,绞吸清淤刀头13可拆卸连接在机械臂12上,可更换不同类型的刀头。
28.绞吸清淤刀头13连接有绞吸泵14,绞吸泵14可拆卸设置在清淤装置本体1内部,绞吸泵14和排污软管15相连。
29.清淤装置本体1上设置有控制舱2,控制舱2内设置有控制系统21,控制系统21无线连接地面站遥控系统3。地面站遥控系统3包括显示屏31,遥控手柄32,第二无线通讯单元33,第二信息处理单元34。控制系统21包括第一无线通讯单元211、清淤单元212、驱动单元213、第一信息处理单元214,控制系统21还包括有自救援系统215,自救援系统215包括路径记忆模块2151和自动控制模块2152以及备用蓄电池2153。
30.控制系统21还和设置在机械臂12上靠近绞吸清淤刀头13处的信息采集装置4相连接;信息采集装置4包括低照度浑水专业相机41、水压传感器42、温度传感器43、姿态传感器44。
31.清淤装置本体1四周固定设置有防撞减震装置5,防撞减震装置5包括第一套管51、第二套管52、第一连接板53、第二连接板54、橡胶垫55和减震弹簧56,第一套管51固定连接在清淤装置本体1上,第一套管51顶部表面插接有第二套管52,第二套管52外表面固定设置有橡胶垫55;第二套管52内腔顶部表面设置有至少一个第一连接板53,第一套管51内腔底部表面固定设置有至少一个第二连接板54,第一连接板53和第二连接板54通过减震弹簧56相连接。
32.清淤装置本体1上设置有吊装组件6,吊装组件6包括吊装链条61、拉环62、吊钩63,吊装链条61穿过拉环62,吊钩63固定设置在吊装链条61两端,对应的,清淤装置本体1上设置有固定环7,用于连接吊钩63。
33.具体实施例1:如图1所示,通过吊装组件6将该多用途小型水下清淤机器人起吊至作业水域,信息采集装置4对作业环境的信息进行采集,其中低照度浑水专业相机41用于拍摄作业水域的实况;水压传感器42和温度传感器43用于检测作业水域能否使该多用途小型水下清淤机器人正常运作;姿态传感器44用于检测该多用途小型水下清淤机器人是否会出现侧翻可能;并通过第一无线通讯单元211传送到第一信息处理单元214;第一信息处理单元214将信息通过第二无线通讯单元33传送到第二信息处理单元34,第二信息处理单元34
将信息处理后在显示屏31上显示出来,工作人员根据显示屏31上的信息,通过遥控手柄32发出具体指令,通过第二信息处理单元34和第二无线通讯单元33将具体指令传达给第一信息处理单元214。第一信息处理单元214将根据具体指令操控清淤单元212、驱动单元213或者信息采集装置4工作。
34.具体实施例2:如图2所示当该多用途小型水下清淤机器人无法接收到地面站遥控系统3的指令时,自救援系统215开始工作。该多用途小型水下清淤机器人在正常运转时,第一信息处理单元214会定时向自动控制模块2152发送信息,如果自动控制模块2152超过限定时间没有接收到第一信息处理单元214发来的信息,就会向驱动单元213直接发出指令,并启用备用蓄电池2153,根据路径记忆模块2151记忆的路线,返回初始点,进行自救援,无需人工对该多用途小型水下清淤机器人进行打捞施救。
35.具体实施例3:如图3所示,该多用途小型水下清淤机器人在作业时,防撞减震装置5中的第一套管51和第二套管52相配合,能够使得防撞减震装置5上下浮动,进而能够防止防撞减震装置5左右摇摆;减震弹簧56使得第一套管51和第二套管52上下浮动时具有减震效果,从而保护清淤装置本体1内的设备不会受到碰撞冲击力而损坏。
36.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。