技术特征:
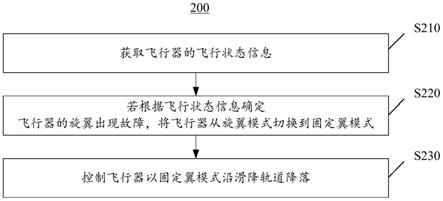
1.一种飞行器的控制方法,其特征在于,包括:获取飞行器的飞行状态信息;若根据所述飞行状态信息确定所述飞行器的旋翼出现故障,将所述飞行器从旋翼模式切换到固定翼模式;控制所述飞行器以所述固定翼模式沿滑降轨道降落。2.根据权利要求1所述的飞行器的控制方法,其特征在于,所述飞行状态信息包括所述旋翼的电机的转速和/或所述飞行器的飞行姿态。3.根据权利要求2所述的飞行器的控制方法,其特征在于,所述飞行状态信息包括所述旋翼的电机的转速;所述根据所述飞行状态信息确定所述飞行器的旋翼出现故障包括:若所述转速未在目标转速范围内,确定所述飞行器的旋翼出现故障。4.根据权利要求2所述的飞行器的控制方法,其特征在于,所述飞行状态信息包括所述旋翼的电机的转速和所述飞行器的飞行姿态;所述根据所述飞行状态信息确定所述飞行器的旋翼出现故障包括:若所述转速未在目标转速范围内且所述飞行姿态未在目标姿态范围内,确定所述飞行器的旋翼出现故障。5.根据权利要求2所述的飞行器的控制方法,其特征在于,所述飞行状态信息包括所述飞行器的飞行姿态;所述根据所述飞行状态信息确定所述飞行器的旋翼出现故障包括:若所述飞行姿态未在目标姿态范围内,确定所述飞行器的旋翼出现故障。6.根据权利要求1所述的飞行器的控制方法,其特征在于,所述滑降轨道是由用户通过控制终端指定的。7.根据权利要求6所述的飞行器的控制方法,其特征在于,在所述控制所述飞行器以所述固定翼模式沿滑降轨道降落之前,还包括:向控制终端发送故障信息;获取所述用户针对所述故障信息确定的轨道规划信息;基于所述轨道规划信息确定所述滑降轨道。8.根据权利要求1所述的飞行器的控制方法,其特征在于,所述滑降轨道是通过对无人机采集到的至少一帧图像进行图像识别得到的。9.根据权利要求1所述的飞行器的控制方法,其特征在于,在所述控制所述飞行器以所述固定翼模式沿滑降轨道降落之前,还包括:控制所述飞行器盘旋飞行。10.根据权利要求9所述的飞行器的控制方法,其特征在于,在所述控制所述飞行器盘旋飞行之后,还包括:控制所述飞行器沿过渡轨道飞行,以从盘旋轨道飞出并进入所述滑降轨道,所述过渡轨道由所述滑降轨道和所述盘旋轨道确定。11.一种飞行器的控制方法,其特征在于,包括:所述飞行器获取当前的飞行状态信息;若根据所述飞行状态信息确定旋翼出现故障,从旋翼模式切换到固定翼模式,并向控制终端发送故障信息;所述控制终端在接收到所述故障信息后,获取用户输入的轨道规划信息,并将所述轨道规划信息发送给所述飞行器;
所述飞行器基于所述轨道规划信息确定滑降轨道,并通过所述固定翼模式沿所述滑降轨道降落。12.根据权利要求11所述的飞行器的控制方法,其特征在于,所述飞行状态信息包括所述旋翼的电机的转速和/或所述飞行器的姿态。13.根据权利要求11所述的飞行器的控制方法,其特征在于,在所述从旋翼模式切换到固定翼模式后,还包括:所述飞行器盘旋飞行。14.根据权利要求13所述的飞行器的控制方法,其特征在于,在所述飞行器基于所述轨道规划信息确定滑降轨道之后,还包括:所述飞行器基于所述滑降轨道确定过渡轨道;在所述通过所述固定翼模式沿所述滑降轨道降落之前,还包括:所述飞行器通过所述固定翼模式从盘旋轨道飞出,经过所述过渡轨道后进入所述滑降轨道。15.根据权利要求11所述的飞行器的控制方法,其特征在于,所述轨道规划信息包括所述滑降轨道的起点和终点,所述获取用户输入的轨道规划信息包括:获取用户在测绘地图中指定的起点;在所述测绘地图上生成以所述起点为圆心,以预设长度为半径的圆;获取所述用户在所述圆上指定的终点。16.一种飞行器的控制装置,其特征在于,包括:获取模块,用于获取飞行器的飞行状态信息;切换模块,用于若根据所述飞行状态信息确定所述飞行器的旋翼出现故障,将所述飞行器从旋翼模式切换到固定翼模式;控制模块,用于控制所述飞行器以所述固定翼模式沿滑降轨道降落。17.一种飞行器的控制装置,包括存储器、处理器以及存储在所述存储器上被所述处理器执行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至10中任一项所述飞行器的控制方法的步骤。18.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至10中任一项所述飞行器的控制方法的步骤。
技术总结
本申请提供了一种飞行器的控制方法和装置、存储介质,解决了现有技术中垂起固定翼无人机的旋翼故障后,降落过程易造成无人机损坏的问题。其中,控制方法包括:获取飞行器的飞行状态信息;若根据飞行状态信息确定所述飞行器的旋翼出现故障,将所述飞行器从旋翼模式切换到固定翼模式;控制所述飞行器以所述固定翼模式沿滑降轨道降落。式沿滑降轨道降落。式沿滑降轨道降落。
技术研发人员:钟欣辰 陈达
受保护的技术使用者:广州极飞科技股份有限公司
技术研发日:2021.10.18
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。