1.本发明涉及基于伴随被检测体的旋转而产生的磁场变化来检测被检测体的旋转状态的旋转检测装置。
背景技术:
2.在专利文献1中记载了上述那样的旋转检测装置的一例。专利文献1所记载的旋转检测装置具备内置有磁检测元件(mr元件)以及磁铁的检测部,检测部与由作为被检测体的磁性体构成的齿轮对置地配置。具体而言,检测部配置为磁铁隔着mr元件位于与齿轮相反的一侧。其结果,当齿轮旋转时,设置于齿轮的凸部以及凹部与mr元件交替地对置。此时,当齿轮的凸部接近mr元件时,从位于mr元件背后的磁铁出来的磁通集中于凸部。因此,磁通的扩散变小。另一方面,当齿轮的凹部接近mr元件时,从位于mr元件背后的磁铁出来的磁通集中于该凹部的两旁的凸部。因此,磁通的扩散变大。根据这样的磁通的变化,mr元件中的磁化自由层的磁化方向发生变化,mr元件的电阻发生变化。专利文献1所记载的旋转检测装置利用如上述那样产生的mr元件的电阻变化来检测齿轮的旋转角、旋转速度。
3.[现有技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本特开2015-133377号公报
技术实现要素:
[0006]
[发明所要解决的课题]
[0007]
上述那样的旋转检测装置被用作构成搭载于例如汽车、摩托车等车辆的abs装置(防抱死制动装置)的车轮速度传感器。近年来,随着自动驾驶系统、驾驶辅助系统等的开发,为了进一步提高abs装置的安全性、可靠性,要求abs装置的冗余化。具体而言,要求将构成abs装置的车轮速度传感器增加到2个以上,即使在1个车轮速度传感器发生故障的情况下,通过其他车轮速度传感器仍能继续车轮的旋转检测的装置结构。
[0008]
在此,为了使用专利文献1所记载的旋转检测装置来实现abs装置的冗余化,需要增加磁铁的数量,或者增大磁铁的大小。具体而言,在专利文献1所记载的旋转检测装置中,在mr元件的背后配置有磁铁。因此,在设置多个mr元件的情况下,需要在各个mr元件的背后分别配置磁铁,或者在多个mr元件的背后配置跨越这些多个mr元件的大的磁铁。但是,磁铁的增设、扩大成为导致旋转检测装置的大型化、成本上升的一个原因。
[0009]
本发明的目的在于,能够在不产生大型化和成本上升等的情况下实现旋转检测装置的冗余化。
[0010]
[用于解决课题的手段]
[0011]
本发明的旋转检测装置基于伴随被检测体的旋转而产生的磁场变化来检测被检测体的旋转状态。本发明的旋转检测装置具有:第一传感器部以及第二传感器部,其具备磁检测元件以及覆盖该磁检测元件的覆盖部件;1个永久磁铁,其配置于上述第一传感器部与
上述第二传感器部之间;以及壳体部,其收纳上述第一传感器部、上述第二传感器部以及上述永久磁铁。
[0012]
在本发明的一个方式中,所述壳体部是将所述第一传感器部、所述第二传感器部以及所述永久磁铁一并模制的树脂成形体。
[0013]
在本发明的另一方式中,所述第一传感器部与所述永久磁铁的第一主面隔着间隙对置,所述第二传感器部与具有与所述第一主面相反的极性的所述永久磁铁的第二主面隔着间隙对置。而且,所述第一传感器部与所述永久磁铁的所述第一主面的第一对置间隔d1与所述第二传感器部与所述永久磁铁的所述第二主面的第二对置间隔d2不同。
[0014]
在本发明的另一方式中,所述第一传感器部以及所述第二传感器部所具备的所述覆盖部件具有夹着所述磁检测元件对置的上表面以及下表面。所述第一传感器部以及所述第二传感器部所具备的所述磁检测元件在所述覆盖部件的所述上表面与所述下表面的对置方向上,埋设于比所述下表面更接近所述上表面的位置。所述第一传感器部以所述覆盖部件的所述下表面与所述永久磁铁的所述第一主面对置的方式配置,所述第二传感器部以所述覆盖部件的所述上表面与所述永久磁铁的所述第二主面对置的方式配置。并且,所述第二对置间隔d2比所述第一对置间隔d1大。
[0015]
在本发明的另一方式中,所述第一传感器部与所述永久磁铁的第一主面抵接,所述第二传感器部与具有与所述第一主面相反的极性的所述永久磁铁的第二主面抵接。
[0016]
[发明效果]
[0017]
根据本发明,能够在不产生旋转检测装置的大型化和成本上升的情况下实现旋转检测装置的冗余化。
附图说明
[0018]
图1中(a)是表示旋转检测装置的使用状态的一例的俯视图,(b)是表示旋转检测装置的使用状态的一例的主视图。
[0019]
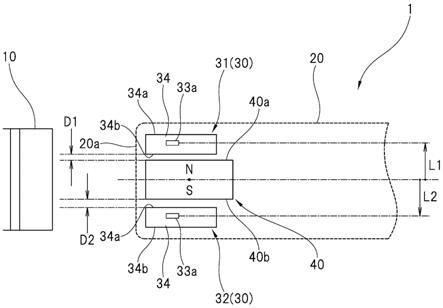
图2是示意性地表示旋转检测装置的构造的一例的说明图。
[0020]
图3中(a)是示意性地表示传感器部的构造的一例的俯视图,(b)是示意性地表示传感器部的构造的一例的侧视图。
[0021]
图4是示意性地表示旋转检测装置的构造的另一例的说明图。
[0022]
图5中(a)是表示旋转检测装置的使用状态的另一例的主视图,(b)是表示旋转检测装置的使用状态的另一例的俯视图。
[0023]
图中:
[0024]
1:旋转检测装置;10:齿轮;11:凸部;12:凹部;13:环;13a:前表面;13b:背面;14:开口部;20:壳体部;20a:前端面;21:凸缘;30传感器部;31:第一传感器部;32:第二传感器部;33a、33b:磁检测元件;34:覆盖部件;34a:上表面;34b:下表面;35a、35b:引线端子;40:永久磁铁;40a:第一主面(上表面);40b:第二主面(下表面);50:电缆。
具体实施方式
[0025]
以下,参照附图对本发明的旋转检测装置的实施方式的一例进行详细说明。本发明的旋转检测装置的用途没有特别限定,本实施方式的旋转检测装置适于作为搭载于汽车
等车辆的abs装置(防抱死制动装置)、构成牵引力控制装置的车轮速度传感器的利用。
[0026]
如图1(a)、(b)所示,本实施方式的旋转检测装置1配置在与车轮一起旋转的齿轮10的附近,基于伴随齿轮10的旋转而产生的磁场变化来检测齿轮10的旋转状态。即,齿轮10相当于本发明的被检测体。
[0027]
作为被检测体的齿轮10由磁性材料形成为圆盘形。另外,在齿轮10的周缘部沿周向以一定间隔交替地形成有凸部11和凹部12。齿轮10伴随着未图示的车轮的旋转而以旋转轴x(图1(a))为中心进行旋转。因此,通过利用旋转检测装置1检测齿轮10的旋转状态(旋转的有无、旋转速度、旋转角等),能够检测车轮的旋转状态(旋转的有无、旋转速度、旋转角等)。
[0028]
旋转检测装置1以与作为磁性体的齿轮10的位置关系成为规定的位置关系的方式固定于车身(轮毂、转向节、悬架等)。具体而言,旋转检测装置1以其前端面20a与齿轮10的凸部11以及凹部12对置的方式固定于车体。因此,当齿轮10随着车轮的旋转而向图1(b)所示的箭头r的方向旋转时,设置于齿轮10的凸部11与凹部12在旋转检测装置1的前端面20a的前方交替地通过。
[0029]
图2是示意性地表示旋转检测装置1的前端部的内部构造的说明图。图2所示的旋转检测装置1的前端部大致相当于图1中由点划线的椭圆包围的a部分。
[0030]
如图2所示,旋转检测装置1具有:壳体部20,其形成前端面20a;2个传感器部(第一传感器部31、第二传感器部32),收容于壳体部20;以及1个永磁体40。第一传感器部31、第二传感器部32及永久磁铁40埋设于壳体部20的前端。另外,第一传感器部31、第二传感器部32及永久磁铁40与齿轮10的旋转轴x(图1(a))平行地排成一列,永久磁铁40配置在第一传感器部31与第二传感器部32之间。换言之,第一传感器部31和第二传感器部32夹着永久磁铁40而对置。进一步换言之,永久磁铁40被第一传感器部31和第二传感器部32夹着。另外,在以下的说明中,有时将第一传感器部31以及第二传感器部32统称为“传感器部30”。
[0031]
图1(a)、(b)以及图2所示的壳体部20是由聚酰胺(pa612、pa610)构成的树脂成形体,整体呈圆柱状的外观。如图2所示,壳体部20一并模制传感器部30及永久磁铁40。如图1(a)所示,在壳体部20的后部一体成形有凸缘21,该凸缘设置有供用于将旋转检测装置1固定于车辆的固定部件(例如螺栓)插通的贯通孔。例如,壳体部20的比凸缘21靠前方的部分插入轮毂、转向节等设置于规定的被固定部件的安装孔。此时,凸缘21的前表面贴靠于被固定部件,插通于凸缘21的贯通孔的螺栓与设置于被固定部件的螺纹孔结合。
[0032]
图2所示的第一传感器部31以及第二传感器部32是相同的传感器ic。如图3(a)、(b)所示,第一传感器部31以及第二传感器部32分别具有2个磁检测元件33a、33b、覆盖这些磁检测元件33a、33b的覆盖部件34、一端与磁检测元件33a连接的引线端子35a、以及一端与磁检测元件33b连接的引线端子35b。即,第一传感器部31以及第二传感器部32的磁检测元件33a、33b埋设于覆盖部件34。另外,在图2中,出于方便起见的理由,省略了图3(a)、(b)所示的引线端子35a、35b。另外,有时在图3(a)、(b)所示的引线端子35a、35b上设置电容器。
[0033]
传感器部30所具备的磁检测元件33a、33b是磁阻效应元件(mr元件)。当图1(a)、(b)所示的齿轮10的凸部11及凹部12交替地通过包含传感器部30及永久磁铁40的旋转检测装置1的前端面20a的前方时,传感器部30所具备的磁检测元件33a、33b的周围的磁场发生变化,这些磁检测元件33a、33b的输出发生变化。即,能够得到与从传感器部30伴随齿轮10
的旋转而产生的磁场变化相应的输出。因此,能够基于传感器部30的输出来检测齿轮10的旋转状态,进而能够检测车轮的旋转状态。另外,随着齿轮10的旋转,作为磁性体的齿轮10与永久磁铁40的最短距离变化,由此可知磁检测元件33a、33b的周围的磁场发生变化。
[0034]
如图3(a)、(b)所示,第一传感器部31以及第二传感器部32的覆盖部件34具有夹着磁检测元件33a、33b而对置的上表面34a以及下表面34b。而且,第一传感器部31以及第二传感器部32中的磁检测元件33a、33b在覆盖部件34的上表面34a与下表面34b的对置方向上,埋设于比下表面34b靠近上表面34a的位置。即,从覆盖部件34的下表面34b到磁检测元件33a、33b的距离(d1)大于从覆盖部件34的上表面34a到磁检测元件33a、33b的距离(d2)(d1>d2)。
[0035]
再次参照图2。永久磁铁40是在厚度方向磁化的2极的永久磁铁,厚度方向一侧和厚度方向另一侧具有相互相反的极性。具体而言,包含第一主面40a的永久磁铁40的厚度方向一侧被磁化为n极,包含与第一主面40a相反侧的第二主面40b的永久磁铁40的厚度方向另一侧被磁化为s极。在以下的说明中,有时将被磁化为n极的永久磁铁40的第一主面40a称为“上表面40a”,将被磁化为s极的永久磁铁40的第二主面40b称为“下表面40b”。
[0036]
如图2所示,第一传感器部31隔着间隙与永磁铁40的上表面40a对置,第二传感器部32隔着间隙与永磁铁40的下表面40b对置。更详细而言,第一传感器部31的覆盖部件34的下表面34b与永久磁铁40的上表面40a隔着间隙对置。另外,第二传感器部32的覆盖部件34的上表面34a与永久磁铁40的下表面40b隔着间隙对置。
[0037]
但是,第一传感器部31的覆盖部件34的下表面34b与永久磁铁40的上表面40a的第一对置间隔(d1)与第二传感器部32的覆盖部件34的上表面34a与永久磁铁40的下表面40b的第二对置间隔(d2)不同。具体而言,第一对置间隔(d1)小于第二对置间隔(d2)(d1<d2)。即,与第二传感器部32相比第一传感器部31更靠近永久磁铁40。换言之,第二传感器部32与第一传感器部31相比远离永久磁铁40。
[0038]
接着,对特意使第一传感器部31相对于永久磁铁40的位置和第二传感器部32相对于永久磁铁40的位置不同的理由及其优点进行说明。
[0039]
如上所述,在第一传感器部31以及第二传感器部32中,从覆盖部件34的下表面34b到磁检测元件33a、33b的距离(d1)比从覆盖部件34的上表面34a到磁检测元件33a、33b的距离(d2)大(图3(b))。
[0040]
因此,若在图2所示的第一传感器部31与第二传感器部32的中间配置永久磁铁40(d1=d2),则第一传感器部31所具备的磁检测元件33a、33b与第二传感器部32所具备的磁检测元件33a、33b相比远离永久磁铁40的中心。在该情况下,有可能在第一传感器部31相对于同等的磁场变化的输出与第二传感器部32相对于同等的磁场变化的输出之间产生偏差。
[0041]
因此,在本实施方式中,通过将图2所示的第一对置间隔(d1)与第二对置间隔(d2)的关系设为(d1<d2),从而使从永磁体40的中心至第一传感器部31所具备的磁检测元件33a、33b为止的距离(l1)与从永磁体40的中心至第二传感器部32所具备的磁检测元件33a、33b为止的距离(l2)相同或者实质上相同。因此,在本实施方式所涉及的旋转检测装置1中,能够降低第一传感器部31相对于同等的磁场变化的输出与第二传感器部32相对于同等的磁场变化的输出之间产生偏差的可能性。即,在本实施方式所涉及的旋转检测装置1中,实现了第一传感器部31的输出与第二传感器部32的输出相同。
[0042]
不过,在能够容许第一传感器部31的输出与第二传感器部32的输出的偏差的情况、能够通过修正处理进行应对的情况下等,也可以将图2所示的第一对置间隔(d1)与第二对置间隔(d2)的关系设为(d1=d2)。例如,也可以使第一传感器部31以及第二传感器部32与永磁铁40抵接。具体而言,如图4所示,也可以使第一传感器部31的覆盖部件34的下表面34b与永久磁铁40的上表面40a抵接,使第二传感器部32的覆盖部件34的上表面34a与永久磁铁40的下表面40b抵接。在该情况下,从永久磁铁40的中心到第一传感器部31的磁检测元件33a、33b的距离(l1)比从永久磁铁40的中心到第二传感器部32的磁检测元件33a、33b的距离(l2)长(l1>l2)。
[0043]
通过使第一传感器部31以及第二传感器部32与永久磁铁40抵接,能够防止或抑制对它们进行模制时的位置偏移。壳体部20通过向配置有第一传感器部31、第二传感器部32及永久磁铁40的模具内注射熔融树脂而成形。此时,通过第一传感器部31、第二传感器部32及永久磁铁40相互抵接,防止或抑制它们因注射压力等而移动。特别是,防止或抑制与永久磁铁40相比小型且轻量的第一传感器部31、第二传感器部32的移动。
[0044]
另外,图2、图4所示的第一传感器部31、第二传感器部32的输出经由图1所示的电缆50传送到abs装置、牵引力控制装置的控制部等。电缆50是包括与第一传感器部31的引线端子35a、35b连接的2芯电缆、与第二传感器部32的引线端子35a、35b连接的2芯电缆、以及将这2根2芯电缆一并被覆的护套的多芯电缆。
[0045]
本发明并不限定于上述实施方式,在不脱离其主旨的范围内能够进行各种变更。例如,第一传感器部31、第二传感器部32所具备的磁检测元件33a、33b可以是巨磁阻效应元件(gmr元件)、各向异性磁阻效应元件(amr元件)或隧道磁阻效应元件(tmr元件)中的任一种,也可以是其他磁阻效应元件。而且,第一传感器部31、第二传感器部32所具备的磁检测元件33a、33b也可以是霍尔元件等磁阻效应元件以外的磁检测元件。另外,也可以使第一传感器部31所具备的磁检测元件与第二传感器部32所具备的磁检测元件不同。例如,也可以将第一传感器部31所具备的磁检测元件设为mr元件,将第二传感器部32所具备的磁检测元件设为gmr元件。
[0046]
形成壳体部20的树脂(模制树脂)不限于聚酰胺。作为形成壳体部20的树脂的一例,可举出聚对苯二甲酸丁二醇酯(pbt)。
[0047]
由本发明的旋转检测装置检测旋转状态的被检测体不限于图1(a)、(b)所示的齿轮10。在图5中示出被检测体的一例。图5所示的环13与图1(a)、(b)所示的齿轮10相同,与车辆的车轮一起旋转。
[0048]
环13由磁性体形成。在环13上沿周向以一定间隔形成有矩形的开口部14。在被检测体是环13的情况下,旋转检测装置1配置在环13的前方或后方。在图5所示的例子中,在环13的前方配置有旋转检测装置1,旋转检测装置1的前端面20a与环13的前表面13a对置。而且,旋转检测装置1以永久磁铁40位于通过环13的内周与外周的中间的假想圆c的圆周上的方式配置。另外,假想圆c在长度方向上将各个开口部14分成两部分或大致两部分。
[0049]
当环13随着车轮的旋转而向图5(a)所示的箭头r的方向旋转时,设置于环13的多个开口部14依次通过旋转检测装置1的前端面20a的前方。其结果,第一传感器部31以及第二传感器部32的周围的磁场发生变化。
[0050]
另外,在将旋转检测装置1配置于环13的后方的情况下,使旋转检测装置1的前端
面20a与环13的背面13b对置。另外,环13的开口部14也可以置换为朝向旋转检测装置1的前端面20a突出的凸部。在该情况下,在环13的前表面13a或背面13b形成有与设置于齿轮10(图1(a)、(b))的周缘部的凹凸实质上相同的凹凸。
[0051]
如果在图3所示的2个磁检测元件33a、33b之间追加磁检测元件,则也能够检测被检测体的旋转方向。也可以使图2、图4所示的永久磁铁40的朝向反转。即,也可以使永久磁铁40的s极与第一传感器部31对置,使永久磁铁40的n极与第二传感器部32对置。
[0052]
另外,虽然在附图中未图示,但旋转检测装置1也可以具备保持第一传感器部31、第二传感器部32以及永久磁铁40并被壳体部20覆盖的保持架。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
