技术特征:
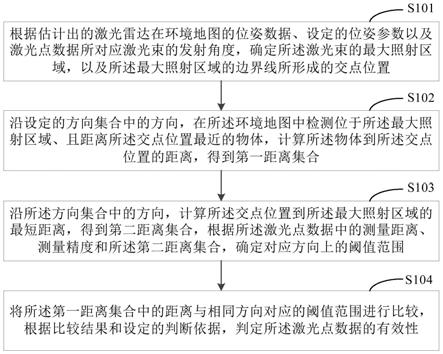
1.一种数据处理方法,其特征在于,包括:根据估计出的激光雷达在环境地图的位姿数据、设定的位姿参数以及激光点数据所对应激光束的发射角度,确定所述激光束的最大照射区域,以及所述最大照射区域的边界线所形成的交点位置;其中,所述位姿参数用于补偿所述位姿数据的误差;沿设定的方向集合中的方向,在所述环境地图中检测位于所述最大照射区域、且距离所述交点位置最近的物体,计算所述物体到所述交点位置的距离,得到第一距离集合;沿所述方向集合中的方向,计算所述交点位置到所述最大照射区域的最短距离,得到第二距离集合,根据所述激光点数据中的测量距离、测量精度和所述第二距离集合,确定对应方向上的阈值范围;将所述第一距离集合中的距离与相同方向对应的阈值范围进行比较,根据比较结果和设定的判断依据,判定所述激光点数据的有效性。2.根据权利要求1所述的方法,其特征在于,所述位姿数据包括估计位置和估计角度,所述位姿参数包括位置参数和角度参数;确定所述激光束的最大照射区域,包括:确定所述激光束的发射点位置;其中,所述发射点位置为以所述估计位置为圆心、所述位置参数为半径的圆内,所述位置参数用于补偿所述估计位置的误差;根据所述估计角度和所述发射角度,计算所述激光束在地图坐标系下的角度,将计算出的角度作为第一角度;根据所述第一角度和所述角度参数,确定所述激光束的发射点角度;其中,所述角度参数用于补偿所述估计角度的误差,所述发射点角度的最小值为所述第一角度与所述角度参数的差值,最大值为所述第一角度与所述角度参数的和值;将所述发射点位置和所述发射点角度进行复合,得到所述激光束的最大照射区域。3.根据权利要求2所述的方法,其特征在于,将所述发射点位置和所述发射点角度进行复合,得到所述激光束的最大照射区域,包括:根据所述第一角度和所述角度参数确定对应的夹角图形;其中,所述夹角图形的角平分线代表所述激光束;将所述夹角图形在所述圆上移动,在移动过程中找出与所述圆相切的两条切线;其中,移动过程中保持所述激光束的方向为所述发射角度,且所述夹角图形的顶点位于圆上或者圆内;所述两条切线与切线所夹的圆弧所形成的开放区域构成所述激光束的最大照射区域;其中,所述圆弧的圆心角小于180
°
。4.根据权利要求2所述的方法,其特征在于,确定所述最大照射区域的边界线所形成的交点位置,包括:根据所述边界线与所述圆的几何关系以及所述位姿参数,计算所述边界线的交点到所述圆心的距离;根据所述第一角度和所述距离,计算所述交点和所述圆心构成的线段在水平方向的第一投影,以及在垂直方向的第二投影;根据所述估计位置、所述第一投影和所述第二投影,计算所述交点在地图坐标系下的位置,得到交点位置;其中,所述交点位置的横坐标为所述估计位置中的横坐标与所述第一投影的差值,纵坐标为所述估计位置中的纵坐标与所述第二投影的差值。
5.根据权利要求2所述的方法,其特征在于,沿所述方向集合中的方向,计算所述交点位置到所述最大照射区域的最短距离,包括:计算第一线段在所述方向集合的当前方向上的第三投影,以及第二线段在所述当前方向上的第四投影;其中,所述第一线段为所述边界线的交点与所述圆心形成的线段,第二线段为当前向量与所述圆弧的交点与所述圆心形成的线段;所述当前向量以所述交点位置为起点,方向为所述当前方向;将所述第三投影和所述第四投影做差,得到所述交点位置到所述最大照射区域的最短距离。6.根据权利要求1至5的任一项所述的方法,其特征在于,所述方法还包括:在所述位姿参数的角度参数所构成的角度范围内选择第二角度,得到角度集合;将第一角度与所述角度集合的第二角度分别求和,相应得到所述方向集合;其中,所述第一角度为所述位姿数据中的估计角度和所述发射角度之和。7.根据权利要求6所述的方法,其特征在于,沿设定的方向集合中的方向,在所述环境地图中检测位于所述最大照射区域、且距离所述交点位置最近的物体,包括:以所述交点位置为起点,所述方向集合的元素为方向,在所述环境地图中检测位于所述最大照射区域、且距离所述交点位置最近的物体。8.根据权利要求1至5的任一项所述的方法,其特征在于,所述判断依据为:位于所述阈值范围内的距离个数为设定数量;其中,所述设定数量小于等于所述方向集合中的方向数量;根据比较结果和设定的判断依据,判定所述激光点数据的有效性,包括:如果所述比较结果满足所述判断依据,则判定所述激光点数据为有效数据;如果所述比较结果不满足所述判断依据,则判定所述激光点数据为无效数据。9.一种数据处理装置,其特征在于,包括:位置确定模块,用于根据估计出的激光雷达在环境地图的位姿数据、设定的位姿参数以及激光点数据所对应激光束的发射角度,确定所述激光束的最大照射区域,以及所述最大照射区域的边界线所形成的交点位置;其中,所述位姿参数用于补偿所述位姿数据的误差;检测计算模块,用于沿设定的方向集合中的方向,在所述环境地图中检测位于所述最大照射区域、且距离所述交点位置最近的物体,计算所述物体到所述交点位置的距离,得到第一距离集合;阈值确定模块,用于沿所述方向集合中的方向,计算所述交点位置到所述最大照射区域的最短距离,得到第二距离集合,根据所述激光点数据中的测量距离、测量精度和所述第二距离集合,确定对应方向上的阈值范围;比较判断模块,用于将所述第一距离集合中的距离与相同方向对应的阈值范围进行比较,根据比较结果和设定的判断依据,判定所述激光点数据的有效性。10.根据权利要求9所述的装置,其特征在于,所述位姿数据包括估计位置和估计角度,所述位姿参数包括位置参数和角度参数;所述位置确定模块,还用于:确定所述激光束的发射点位置;其中,所述发射点位置为以所述估计位置为圆心、所述位置参数为半径的圆内,所述位置参数用于补偿所述估计位置的误差;
根据所述估计角度和所述发射角度,计算所述激光束在地图坐标系下的角度,将计算出的角度作为第一角度;根据所述第一角度和所述角度参数,确定所述激光束的发射点角度;其中,所述角度参数用于补偿所述估计角度的误差,所述发射点角度的最小值为所述第一角度与所述角度参数的差值,最大值为所述第一角度与所述角度参数的和值;将所述发射点位置和所述发射点角度进行复合,得到所述激光束的最大照射区域。11.一种电子设备,其特征在于,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-8中任一所述的方法。12.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-8中任一所述的方法。
技术总结
本发明公开了一种数据处理方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:确定激光束的最大照射区域,以及最大照射区域的边界线所形成的交点位置;沿设定的方向集合中的方向,在环境地图中检测位于最大照射区域、且距离交点位置最近的物体,计算物体到交点位置的距离,得到第一距离集合;沿方向集合中的方向,计算交点位置到最大照射区域的最短距离,得到第二距离集合,确定对应方向上的阈值范围;将第一距离集合中的距离与相同方向对应的阈值范围进行比较,根据比较结果和设定的判断依据,判定激光点数据的有效性。该实施方式补偿了位姿数据的误差,保证有效性判定的准确性,实现了对新获取的激光雷达数据的预处理。理。理。
技术研发人员:张健
受保护的技术使用者:北京京东振世信息技术有限公司
技术研发日:2021.03.23
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。