1.本发明涉及拉紧机构,尤其涉及手提打包机的拉紧机构。
背景技术:
2.手提打包机是一种便携式设备,用于方便地携带到相关工作点捆扎物品。其中的拉紧机构用于把打包带在绕物品一圈后拉紧打包带,其执行机构采用拉紧轮。以往的手提打包机采用有手柄的结构,通过操作手柄使手提打包机从拉紧状态进入到非拉紧状态(作为放打包带或移出打包带的工作状态),操作不够自动化。
技术实现要素:
3.本发明的目的是提供一种拉紧机构,适用于安装在手提打包机中应用,实现手提打包机从拉紧状态进入到非拉紧状态的无手柄操作。为此,本发明采用以下技术方案:
4.拉紧机构,安装在手提打包机中,所述手提打包机设置拉紧轮、拉紧轮驱动电机;其特征在于所述驱动电机和拉紧轮之间设置有齿轮连接机构,所述拉紧机构还设置有旋转方向控制和旋转角度保持机构、止逆机构、摇臂,所述旋转方向控制和旋转角度保持机构与止逆机构和摇臂连接;所述摇臂上设置与拉紧轮配合的齿结构,通过所述旋转方向控制和旋转角度保持机构和第二复位机构的配合而驱动摇臂转动及保持摇臂转动到位后的角度,以使所述齿结构和拉紧轮处于拉紧配合状态或松开状态;通过所述旋转方向控制和旋转角度保持机构和第一复位机构的配合,驱动所述止逆机构处于止逆配合状态或脱开止逆配合状态,所述齿轮连接机构和止逆机构连接,在止逆机构处于止逆配合状态时,拉紧轮只能被单向驱动转动而不能倒转,所述单向为使打包带被拉紧的旋转方向。
5.所述旋转方向控制和旋转角度保持机构采用舵机。
6.进一步地,所述止逆机构包括止逆机构连接齿轮、和止逆机构连接齿轮同轴连接的棘轮以及和棘轮配合的棘爪,棘爪通过第一连接结构和第一连接齿轮配合而能被第一连接齿轮驱动,所述摇臂通过第二连接结构和第二连接齿轮配合而能被第二连接齿轮驱动,所述旋转方向控制和旋转角度保持机构驱动所述第一连接齿轮、第二连接齿轮。
7.进一步地,所述第一连接齿轮和第二连接齿轮啮合连接而同步转动,第二连接齿轮比第一连接齿轮大而转速比第一连接齿轮小。
8.进一步地,所述第二连接机构包括被第二连接齿轮驱动的驱动件、转动连接件,所述转动连接件设置与主动件配合的被作用部位,所述转动连接件还设置与摇臂连接的结构。所述转动连接件还进一步设置与第二复位机构连接的部位。
9.进一步地,所述转动连接件呈圈状,其转动中心线和拉紧轮的转动中心线共线,所述齿轮连接结构中设置有行星齿轮减速机构,圈状的所述转动连接件通过轴承安装在行星齿轮减速机构上。
10.进一步地,所述棘爪臂被安装在第二连接齿轮的轴上并能相对第二连接齿轮的轴转动,所述主动件和第二连接齿轮的轴固定连接或为一体。
11.进一步地,所述齿轮连接结构中含有行星齿轮减速机构以及驱动电机和行星齿轮减速机构之间的连接齿轮。行星齿轮减速机构可以设置一级或多级。
12.进一步地,一种优选的实施方式为:所述舵机和拉紧轮驱动电机平行布置,所述舵机处在拉紧轮和拉紧轮驱动电机的侧上方;所述舵机通过主动齿轮和第一连接齿轮连接,第一连接齿轮再和第二连接齿轮啮合连接,第二连接齿轮比第一连接齿轮大而转速比第一连接齿轮小;
13.所述止逆机构包括止逆机构连接齿轮、和止逆机构连接齿轮同轴连接的棘轮以及和棘轮配合的棘爪,棘爪通过第一连接结构和第一连接齿轮连接,所述摇臂通过第二连接结构和第二连接齿轮连接;
14.所述第二连接机构包括被第二连接齿轮驱动的驱动件、转动连接件,所述转动连接件设置与主动件配合的被作用部位,所述转动连接件还设置与摇臂连接的结构;
15.所述转动连接件呈圈状,其转动中心线和拉紧轮的转动中心线共线,所述齿轮连接结构中设置有行星齿轮减速机构,圈状的所述转动连接件通过轴承安装在行星齿轮减速机构的安装盘上,所述拉紧轮设置内齿圈,与行星齿轮减速机构的太阳齿轮同轴的输出齿轮与内齿圈之间通过连接齿轮连接;
16.所述止逆机构设置在行星齿轮减速机构之前;
17.止逆机构连接齿轮通过单向轴承安装在棘轮的轴上,当拉紧机构进行拉紧工作时,所述止逆机构处于止逆配合状态,在对应拉紧轮拉紧转动方向上,所述单向轴承允许止逆机构连接齿轮相对于棘轮转动,当拉紧轮驱动电机停止转动时,在反方向禁止止逆机构连接齿轮相对于棘轮转动而必须两者一起转动。
18.进一步地,所述内齿圈与行星齿轮减速机构的太阳齿轮同轴线设置;所述拉紧轮和行星齿轮减速机构在轴向上前后靠近地布置。以能够进一步减少连接部件并减小机器的体积,便于手提打包机的使用。
19.进一步地,所述第一齿轮和行星齿轮减速机构的太阳齿轮同轴连接在一起,以进一步简化连接结构。作为替代的,第一齿轮和太阳齿轮也可通过中间齿轮进行连接而非同轴。
20.进一步地,所述行星齿轮减速机构的行星齿轮架和行星齿轮设置在安装盘面向驱动电机这一侧,所述行星齿轮减速机构的行星齿轮架的转轴与所述输出齿轮连接,所述输出齿轮处在安装盘的另一侧,所述内齿圈就处在其外围,所述输出齿轮与内齿圈之间设置多个围绕输出齿轮的连接齿轮,连接齿轮轴固定在安装盘上。
21.进一步地,所述连接齿轮与输出齿轮之间为减速连接关系。
22.由于采用本发明的技术方案,本发明结构紧凑,适于应用于手提打包机,无需操作手柄即实现手提打包机从拉紧状态进入到非拉紧状态的无手柄操作。进一步地,对于采用拉紧轮专属驱动电机的拉紧机构,避免了采用蜗轮蜗杆结构,同时可以实现相邻和同心包容的紧凑装配关系,减小体积,使行星齿轮适于在手提打包机所限定和适用的空间中使用并配置止逆机构,体积小并能供使用者方便的手提使用且能耗小。
23.以下结合附图和具体实施方式对本发明作进一步的详细说明。
附图说明
24.图1为本发明实施例的立体示意图。
25.图2为本发明实施例的另一个角度的立体示意图。
26.图3为在隐去电机安装座后的本发明实施例的正视图。
27.图4为止逆机构及其周围结构的爆炸图。
28.图5为止逆机构和行星齿轮机构的爆炸图。
29.图6为应用本发明的手提打包机实施例的爆炸图。
具体实施方式
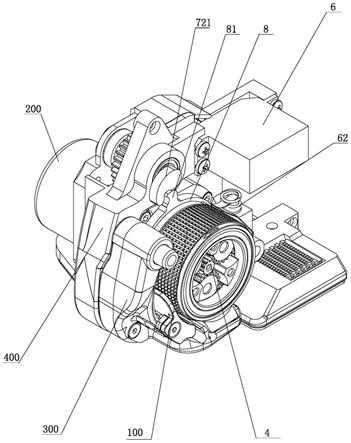
30.参照附图。本发明提供了拉紧机构,安装于手提打包机中应用,所述手提打包机设置拉紧轮100、拉紧轮驱动电机200。驱动电机200安装在其安装板203上,安装板203和安装座400固定连接。所述驱动电机200和拉紧轮100之间设置有齿轮连接机构,所述齿轮连接结构中含有行星齿轮减速机构以及驱动电机200和行星齿轮减速机构之间的连接齿轮。
31.所述拉紧机构还设置有旋转方向控制和旋转角度保持机构、止逆机构、摇臂300,所述旋转方向控制和旋转角度保持机构可采用舵机6。所述舵机6与止逆机构和摇臂300连接,所述摇臂300可转动地安装在安装座400上并处在拉紧轮100的外围;所述摇臂300上设置与拉紧轮100配合的齿结构301,通过所述舵机6和第二复位机构的配合而驱动摇臂300转动及保持摇臂300转动到位后的角度,其中,第二复位机构采用压簧62,以使所述齿结构301和拉紧轮100处于拉紧配合状态或松开状态;通过所述舵机6和第一复位机构的配合,驱动所述止逆机构处于止逆配合状态或脱开止逆配合状态,其中,第一复位机构采用压簧61,所述齿轮连接机构和止逆机构连接,在止逆机构处于止逆配合状态时,拉紧轮100只能被单向驱动转动而不能倒转,所述单向为使打包带被拉紧的旋转方向。
32.所述止逆机构包括止逆机构连接齿轮21、和止逆机构连接齿轮21同轴连接的棘轮22以及和棘轮配合的棘爪23,棘爪23通过第一连接结构和第一连接齿轮71配合而能够被第一连接齿轮驱动,所述摇臂300通过第二连接结构和第二连接齿轮72配合而能够被第二连接齿轮驱动。
33.所述舵机6和拉紧轮驱动电机200平行布置,所述舵机6处在拉紧轮100和拉紧轮驱动电机200的侧上方;所述舵机6通过主动齿轮73和第一连接齿轮71连接,第一连接齿轮71再和第二连接齿轮72啮合连接,主动齿轮73、第一连接齿轮71和第二连接齿轮72的轴线与拉紧轮轴线平行,棘爪臂230设置在第二连接齿轮72的轴720上,并能相对于第二连接齿轮72的轴720转动,第一连接齿轮71和第二连接齿轮72同步转动,第二连接齿轮72比第一连接齿轮71大而转速比第一连接齿轮71小,使得手提打包机的重心更稳,棘爪23的动作更加灵敏而摇臂300具有合适的转动角度;并且,第一连接齿轮71也比主动齿轮大,也为减速配合关系。
34.所述第一连接结构包括在第一连接齿轮轴710上的第一凸轮711和设置在棘爪臂230上的第二凸轮231,第一凸轮711和第二凸轮231相配合,棘爪臂230与复位弹簧61连接,所述舵机6的正转通过上述凸轮配合对棘爪脱离棘轮起到驱动作用,复位弹簧61不仅用于驱动棘爪23复位而和棘轮23形成啮合配合,同时也用于使第二凸轮231靠向第一凸轮711。
35.棘轮22的轴220的两端分别通过轴承25安装于安装板203和安装座400上。连接齿
轮21通过单向轴承27安装在棘轮22的轴上,单向轴承27的方向为:当拉紧机构进行拉紧工作时,允许连接齿轮21在第一齿轮1的带动下相对于棘轮22转动,当拉紧轮驱动电机200停止转动时,在反方向禁止连接齿轮21相对于棘轮转动而必须两者一起转动。
36.所述第二连接机构包括被第二连接齿轮驱动的驱动件721、转动连接件8,所述转动连接件8设置与驱动件721配合的被作用部位81,所述转动连接件还设置与摇臂连接的结构82以及与第二复位机构连接的部位83。所述驱动件721和第二连接齿轮72的轴720固定连接或为一体,所述舵机的正转,通过驱动件721对被作用部位81的作用,使得转动连接件8产生转动,该转动通过与摇臂连接的结构82,而使得摇臂300产生向着松开方向运动一个角度,摇臂300可设置一个和结构82配合的卡口302。所述舵机的反转时,驱动件721反向转动而让位,通过压簧62的作用,而使得转动连接件8反向转动,通过与摇臂连接的结构82,而使得摇臂300产生向着拉紧方向运动一个角度,使所述齿结构301和拉紧轮100处于拉紧配合状态。
37.所述转动连接件8呈圈状,其转动中心线和拉紧轮100的转动中心线共线,圈状的所述转动连接件8通过轴承安装在行星齿轮减速机构的安装盘500上。由于舵机6处在拉紧轮100的斜上方,由于主动齿轮73、第一连接齿轮71和第二连接齿轮72与拉紧轮轴线平行,第二连接齿轮72的轴720平行布置在圈状转动连接件8的上方,使得驱动件721在圈状转动连接件8的上方利用其转动直径比圈状转动连接件8的直径小的特点,而使摇臂转动角度可以转动较小的角度,提高工作速度和机器的精密性。
38.所述拉紧轮100设置内齿圈101,与行星齿轮减速机构的太阳齿轮31同轴线的输出齿轮4与内齿圈101之间通过连接齿轮5连接;所述内齿圈101与行星齿轮减速机构的太阳齿轮31同心设置,它们的转动中心处在同一轴线上;所述拉紧轮100和行星齿轮减速机构在轴向上前后靠近地布置。
39.所述止逆机构设置在行星齿轮减速机构前,所述驱动电机200的输出轴201上设置主动齿轮202,所述主动齿轮202和第一齿轮1啮合连接,其关系为减速连接关系;第一齿轮1就处于行星齿轮减速机构前,所述第一齿轮1和行星齿轮减速机构连接,并且第一齿轮1还和所述止逆机构传动连接(与连接齿轮21啮合连接)。
40.所述第一齿轮1和行星齿轮减速机构的太阳齿轮31的轴是同一根轴或为一整体,该轴通过轴承11安装在安装座400上。
41.本发明还提供了一种结构简单便于装配体积小的减速机构的实施方式,行星齿轮减速机构包括所述太阳齿轮31、3个行星齿轮32、行星齿轮架33和内齿环34,内齿环34设置在安装盘500上,安装盘500固定在安装座400上,其中3个行星齿轮32的齿轮轴安装在行星齿轮架33上,行星齿轮架33的转轴35穿过安装盘500上的安装孔并可转动地安装在安装盘500上。行星齿轮架33和行星齿轮32设置在安装盘500面向驱动电机200的这一侧,所述行星齿轮减速机构的行星齿轮架33的转轴35与所述输出齿轮4连接,所述输出齿轮4处在安装盘500的另一侧,所述内齿圈101就处在输出齿轮4外围,所述连接齿轮5有多个,围绕所述输出齿轮4周围,连接齿轮5的轴固定在安装盘500上,连接齿轮5的数量一般为3个。所述连接齿轮5与输出齿轮4之间也为减速连接关系。
42.以上所述仅为本发明的具体实施例,但本发明的结构特征并不局限于此,任何本领域的技术人员在本发明的领域内,所作的变化或修饰皆涵盖在本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。