一种基于dem分析遥感卫星影像的海岸线交互式提取方法
技术领域
1.本发明涉及海岸线提取领域,具体涉及一种基于dem分析遥感卫星影像的海岸线交互式提取方法。
背景技术:
2.海岸线是陆地与海洋的交界线。一般分为岛屿海岸线和大陆海岸线。它是发展优良港口的先天条件。曲折的海岸线极有利于发展海上交通运输,海岸线的划界以该地正常高潮位浸水水面的高程划定,即浸水水面为海域,干出地带为陆域,由于受地壳下降活动的影响,引起海水的侵入(海侵)或海水的后退现象,造成了海岸线的巨大变化。这种变化直到今天也没有停止。
3.现有的海岸线交互式提取方法存在不足之处,目前用遥感图像解译海岸线变化主要有目视解译和自动解译两种方法,传统的目视解译经手工透图作业,方法简单,但误差较大。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的上述问题,提供一种基于dem分析遥感卫星影像的海岸线交互式提取方法。
5.为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
6.一种基于dem分析遥感卫星影像的海岸线交互式提取方法,其特征在于,所述方法包括:
7.步骤s1:对多光谱数据和数据全色配准和融合;
8.步骤s2:将海岸线分为自然岸线和人工岸线两大类;
9.步骤s3:采用阀值分割法,所述阀值分割法分为全局阈值法、局部阀值法和动态阀值法;
10.步骤s4:边缘检测法。
11.优选地,所述步骤s1,经过对多光谱数据和数据全色配准和融合得到2.5m的彩色影像,利用地面控制点和dem对其进行正射校正,定位精度优于1个像素。文中影像截图皆为近红外、红、绿3个波段组合。
12.优选地,所述步骤s2,其中自然岸线按照底质组成又分为基岩岸线、砾石岸线、砂质岸线、淤泥质岸线、生物岸线,人工岸线细分为堤(坝)、桥、闸、码头。海岸线提取的内容包括几何位置的绘制和上述海岸线类型的识别。
13.优选地,所述步骤s3,通过设置灰度阀值将图像进行分割的方法,具有原理简单、易操作、应用广泛等优点,对于一幅二维数字图像,设(x,y)为像素点坐标,f(x,y)为该点的灰度值,g(取值范围为[0,l-])代表灰度级,t(0≤t≤l-1)是分割阀值,b={bo,b}代表分割后的二值灰度级,在这个过程中,阈值t的选取对图像的分割效果至关重要。根据不同的选取准则。
[0014]
优选地,所述步骤s3,全局阈值法:t=[f(x,y)],这种方法通过遥感影像中像素点的灰度值来确定分割阀值的大小,该阈值一旦选定后便不再发生变化,且应用于整幅遥感影像。
[0015]
优选地,局部阀值法:t=t[(x,y),p(x,y)],全局阀值往往难以满足整幅遥感影像的分割需要,通常将遥感影像分割成多个一定大小的子区域,每个子区域分别设定阀值,这时阀值是由图像像素f(x,y)和邻域像素p(x,y)共同决定的。
[0016]
优选地,所述步骤s3,动态阀值法(也称自适应阈值法):t=[x,y,f(x,y),p(x,y)],相较于局部阈值法,动态阈值法考虑了像素点的空间位置,将空间信息也作为确定阈值的考虑因素。
[0017]
优选地,所述步骤s4,边缘是图像最重要的特征之一,是灰度值发生剧烈变化的位置,分为阶跃边缘和线状边缘两种类型,采用灰度函数一阶导数的极大值点或者二阶导数的过零点来进行边缘检测,对于一维阶跃边缘来说,边缘位置在一阶导数中对应极大值点处,而在二阶导数中则对应过零点处。
[0018]
有益效果:
[0019]
以遥感影像为数据源,以海岸线的提取为研究内容,以提高海岸线的提取精度为研究目标,从不同的实际需求和应用条件出发,以现有的方法和技术为基础,改进海岸线提取算法。
[0020]
当然,实施本发明的任一产品并不一定需要同时达到以上的所有优点。
附图说明
[0021]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0022]
图1本发明海岸带示意图;
[0023]
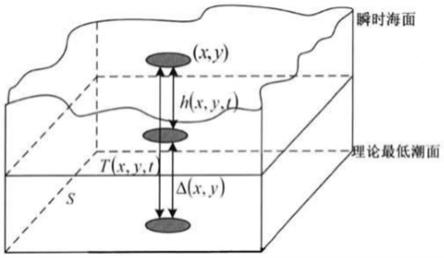
图2本发明海面状态示意图;
[0024]
图3本发明阀值观测示意图;
[0025]
图4本发明海岸线层级图;
[0026]
图5本发明遥感海岸线观测图;
[0027]
附图中标号如下:
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0029]
如图1-5所示,本发明为一种基于dem分析遥感卫星影像的海岸线交互式提取方法,其特征在于,所述方法包括:
[0030]
步骤s1:对多光谱数据和数据全色配准和融合;
[0031]
步骤s2:将海岸线分为自然岸线和人工岸线两大类;
[0032]
步骤s3:采用阀值分割法,所述阀值分割法分为全局阈值法、局部阀值法和动态阀值法;
[0033]
步骤s4:边缘检测法。
[0034]
其中,经过对多光谱数据和数据全色配准和融合得到2.5m的彩色影像,利用地面控制点和dem对其进行正射校正,定位精度优于1个像素。文中影像截图皆为近红外、红、绿3个波段组合,其中自然岸线按照底质组成又分为基岩岸线、砾石岸线、砂质岸线、淤泥质岸线、生物岸线,人工岸线细分为堤(坝)、桥、闸、码头。海岸线提取的内容包括几何位置的绘制和上述海岸线类型的识别,通过设置灰度阀值将图像进行分割的方法,具有原理简单、易操作、应用广泛等优点,对于一幅二维数字图像,设(x,y)为像素点坐标,f(x,y)为该点的灰度值,g(取值范围为[0,l-])代表灰度级,t(0≤t≤l-1)是分割阀值,b={bo,b}代表分割后的二值灰度级,在这个过程中,阈值t的选取对图像的分割效果至关重要。根据不同的选取准则,全局阈值法:t=[f(x,y)],这种方法通过遥感影像中像素点的灰度值来确定分割阀值的大小,该阈值一旦选定后便不再发生变化,且应用于整幅遥感影像,局部阀值法:t=t[(x,y),p(x,y)],全局阀值往往难以满足整幅遥感影像的分割需要,通常将遥感影像分割成多个一定大小的子区域,每个子区域分别设定阀值,这时阀值是由图像像素f(x,y)和邻域像素p(x,y)共同决定的,动态阀值法(也称自适应阈值法):t=[x,y,f(x,y),p(x,y)],相较于局部阈值法,动态阈值法考虑了像素点的空间位置,将空间信息也作为确定阈值的考虑因素,边缘是图像最重要的特征之一,是灰度值发生剧烈变化的位置,分为阶跃边缘和线状边缘两种类型,采用灰度函数一阶导数的极大值点或者二阶导数的过零点来进行边缘检测,对于一维阶跃边缘来说,边缘位置在一阶导数中对应极大值点处,而在二阶导数中则对应过零点处。
[0035]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料过着特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0036]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式,显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。