1.本发明涉及医疗器械领域。具体而言,涉及一种内科临床用应急呼吸系统。
背景技术:
2.随着目前呼吸道流行病的种类变多,呼吸内科的应对患有呼吸道疾病的病人的压力越发增中;同时近年来出现的具有强传染性的呼吸类相关的流行病令确诊或疑似确诊的人数可以在短时间内迅速增加,大为增加了呼吸内科的应急处理压力。进一步的,在一些医疗资源较差的地区,或者城市内的小型医院,根据以往呼吸内科的病例统计而配备的辅助呼吸设备较少,亦因为相关成本呼吸设备和系统的售价高昂,受制于成本,这些小型医院亦难以大量配置应急呼吸系统,从而出现了医疗条件的瓶颈。
3.目前大量使用简易人工手动呼吸器对遭遇紧急情况的呼吸困难病人进行临时性的救治;该类呼吸器结构相对简单,使用方便,应对紧急的呼吸病例,例如无法自主吸气的情况,的确可以作为临时性的紧急使用设备;同时由于成本低,在医疗条件缺乏的地区其可用性和接受程度尚可,不失在应急情况和客观条件不允许情况下,一个折衷的设备选择。然而使用人工手动呼吸器时,救治人员需要一手控作呼吸器,另一手需要不时调整病人口腔的位置和姿势,原本紧张的救治人员资源只能被无奈占用,如能将该名负责操作手动呼吸器的人员释放出来,可以为病人提供更有效的救治操作,或者在同一时间救治更多病人。
4.查阅相关地已公开技术方案,公开号为us2021338952(a1)的技术方案提出了一种双气囊的呼吸机装置,可以实现更大的呼吸气量以及在换气期间实现更平滑的衔接;公开号为wo2021203189(a1)的技术方案推出一种适用于icu急诊科室的呼吸机,其内部具有一个用滚珠螺杆推进活塞机构,通过活塞的移动来产生气体的输出;公开号为cn113117199(a)的技术方案提出一种无创呼吸机控制系统,使用多个传感器对呼吸机内的气管道进行监控,从而实现气量的精确控制。以上技术方案实现的方法都较为复杂,并未能在软、硬件都缺乏的区域很好地适用,因此,尚需一种适用性强,成本容易控制的应急型呼吸机系统。
技术实现要素:
5.本发明的目的在于,提供一种内科临床用应急呼吸系统;所述呼吸系统能够装入并固定现有的手动呼吸器,通过驱动内部的压缩模块,对手动呼吸器实现可控的压缩行程和压缩频率,从而产生可调节的气体输出,能为应急情况下的病人提供一种呼吸救援操作,实现对紧张救援人手资源的进行释放。
6.本发明采用如下技术方案:
7.一种内科临床用应急呼吸系统,所述呼吸系统包括:
8.固定模块:包括一个固定腔,用于放置并固定保持人工呼吸器;
9.压缩模块:所述压缩模块包括一组以上的压缩组件;所述压缩组件具有收缩机构,并作往复式开合运动,通过周期性挤压所述人工呼吸器,使所述呼吸系统产生气体供给;
10.监测模块:包括至少一个用于测量气体参数的传感器,用于测量进出所述呼吸系
统的气体及气流的参数;
11.控制模块:包括电池与控制单元;所述电池用于为所述呼吸系统提供电力驱动;所述控制单元通讯连接所述压缩模块以及所述监测模块,并根据内部程序指令控制所述压缩模块的运转状态;
12.其中,所述压缩模块包括固定框、转盘以及多片压缩板组成;多片所述压缩板绕固定框的圆周均匀分布排列;所述固定框上具有多个导向槽,每个所述导向槽与每片所述压缩板第一侧的导向销配合装置,使所述导向销沿所述导向槽移动;进一步的,所述转盘表面均匀分布多个圆弧形长孔;每个所述长孔与每片所述压缩板第二侧的滚轴配合形成凸轮副机构,并使所述滚轴在所述长孔内光滑移动;当驱动所述转盘时,转盘通过凸轮副的作用驱动所述压缩板,在所述导向槽与所述长孔的共同作用下,使多片所述压缩板围绕的空间收窄,形成压缩空间效果;
13.所述压缩模块还包括电机以及传动组件;所述电机由所述电池驱动,并受所述控制单元控制其转速以及扭矩;
14.所述压缩模块包括一个压缩行程以及一个恢复行程;所述压缩行程的压缩幅度以及频率由所述控制模块的指令进行控制;
15.所述固定模块包括固定支架,用于固定所述人工呼吸器顶端以及底端;
16.所述监测模块至少包括气体流量计、气压计;
17.所述呼吸系统包括一个显示面板,用于指示当前所述呼吸系统的工作参数;
18.所述呼吸系统包括一个调节装置,用于指定当前所述呼吸系统的工作参数;
19.所述控制模块包括微处理器、存储器以及多个数据接口;所述监测模块通过所述数据接口向所述控制模块提交监测数据;所述压缩模块通过所述数据接口获取控制指令,从而实现对所述压缩模块的驱动控制;所述存储器中存储有所述内科临床用应急呼吸系统的控制方法和数据处理程序,适用于所述内科临床用应急呼吸系统的控制方法和数据处理程序被所述微处理器执行时,实现对所述呼吸系统的自动控制。
20.本发明所取得的有益效果是:
21.1.本发明可以有效与现有的手动呼吸器进行升级工作,有效控制使用成本,适应缺乏医疗条件的使用地区;
22.2.本发明的内部压缩模块可以模拟人手推手动呼吸器的压缩和舒张过程,良好地配合呼吸器原有的工作结构实现产生合规的呼吸气压和气流;
23.3.本发明的实施方法结构清晰,生产制造要求相对较低,加工生产容易,同时能更快地令使用者掌握其使用方法;
24.4.本发明的软、硬件布局需求基于模块化设计,可在技术更新和修改阶段方便地进行切换和升级,有利于今后技术方案的优化和升级。
附图说明
25.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
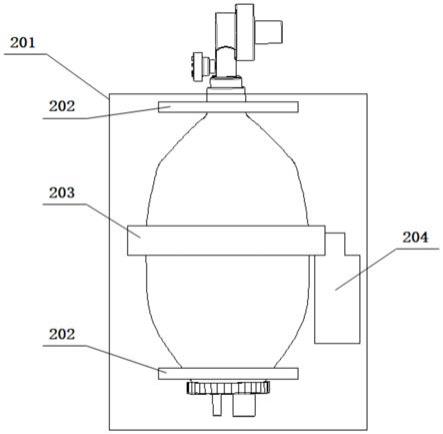
26.图1为本发明所述呼吸系统的总体布局示意图;
27.图2为本发明所述人工手动呼吸器示意图;
28.图3为本发明所述压缩模块的正、反面示意图;
29.图4为本发明多片所述压缩板的组合示意图;
30.图5为本发明实施例2的示意图;
31.图6为本发明中多个传感器的组件示意图;
32.附图编号说明:100-手动呼吸器;101-气囊;102-进气口;103-进气阀;104-单向阀;105-压力安全阀;106-出气口;107-呼气阀;108-氧气接口;201-外壳;202-固定支架;203-压缩组件;204-电机;205-传动组件;206-电池;301-固定框;302-转盘;303-压缩板;304-长孔;305-导向槽;401-导向销;402-滚轴。
具体实施方式
33.为了使得本发明的目的技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统、方法、特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
34.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位.以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
35.实施例一:
36.一种内科临床用应急呼吸系统,所述呼吸系统包括:
37.固定模块:包括一个固定腔,用于放置并固定保持人工呼吸器;
38.压缩模块:所述压缩模块包括一组或以上的压缩组件;所述压缩组件具有开合机构,并作往复式开合运动,通过周期性挤压所述人工呼吸器,使所述呼吸系统产生气体供给;
39.监测模块:包括位于所述进气口以及所述出气口的传感器,用于测量进出所述呼吸系统的气体及气流的参数;
40.控制模块:包括电池与控制单元;所述电池用于为所述呼吸系统提供电力驱动;所述控制单元通读连接所述压缩模块以及所述监测模块,并根据所述监测模块获取的数据从而控制所述压缩模块的运转状态;
41.所述压缩模块还包括电机以及传动组件;所述电机由所述电池驱动,并受所述控制单元控制其转速以及扭矩;
42.所述压缩模块包括一个压缩行程以及一个回复行程;所述压缩行程的压缩幅度以及频率由所述控制模块进行指令控制;
43.所述固定模块包括固定支架,用于固定所述人工呼吸器顶端以及底端;
44.所述监测模块至少包括气体流量计、气压计;
45.所述呼吸系统包括一个显示面板,用于指示当前所述呼吸系统的工作参数;
46.所述呼吸系统包括一个调节装置,用于指定当前所述呼吸系统的工作参数;
47.所述控制模块包括微处理器、存储器以及多个数据接口;所述监测模块通过所述数据接口向所述控制模块提交监测数据;所述压缩模块通过所述数据接口获取控制指令,从而实现对所述压缩模块的驱动控制;所述存储器中存储有所述内科临床用应急呼吸系统的控制方法和数据处理程序,适用于所述内科临床用应急呼吸系统的控制方法和数据处理程序被所述微处理器执行时,实现对所述呼吸系统的自动控制;
48.如附图2所示,是目前手动呼吸器100的常见结构形式;其中气囊101常见的容积在350毫升至550毫升之间,小型的也有100毫升的规格;当挤压所述气囊101时,对外部产生正压,此时进气阀103关闭,所述气囊101内部气体强制性推动单向阀104打开,并堵住呼气阀107,气体随即由单向阀104的中心切口送出出气口106,送向病人;所述出气口106一般连接呼吸口罩,或者通过气管连接呼吸面罩,从而封闭病人的口鼻,使病人接受所述手动呼吸器100的正压从而实现吸气;
49.另一方面,当停止挤压所述气囊101时,所述气囊101自行复原,所述呼气阀107打开,病人呼出的气体由所述呼气阀107排出;与此同时,所述进气阀103在所述气囊101复原的负压作用下内部阀门打开,外界空气或者氧气的供应则随之进入所述气囊101内而充盈其内部;
50.进一步的,压力安全阀105可以自动调整由所述出气口106呼出的气压在安全范围(400至600毫米水柱,若压力过大则气体会由安全排气口泄出;同时在进气口102旁还具有一个氧气接口108,用于接驳外部的供氧设备,并在所述气囊101内进行混合;
51.常规操作下,救援人员需要一手操作所述手动呼吸器100,一手用于保持病人的呼吸面罩,以及保持病人的头颈姿势处于合理呼吸的状态;因此本实施例在合理情况下,用于减小救援人员对于所述手动呼吸器100的持续性操作;
52.本实施例如附图1:所述呼吸系统由一个外壳201作为容纳其他部分的部件;所述外壳201可以包括适合医疗设备使用的刚性和强度足够强的材料,例如高分子塑料或者不锈钢制造;所述外壳201内部包括用于部分或者全部容纳所述手动呼吸器100的固定腔;所述固定腔中,包括两个固定支架202;所述两个固定支架202分别固定所述手动呼吸器100的两端,从而阻止所述手动呼吸器100在所述固定腔内发生位移;
53.进一步的,所述固定腔内还安装一个压缩组件203,如附图3以及附图4所示:所述压缩组件203包括固定框301、转盘302以及多片压缩板303;多片所述压缩板303绕固定框301的圆周均匀分布排列;如所述固定框301上具有多个导向槽305,每个所述导向槽305与每片所述压缩板303第一侧的导向销401配合装置,使所述导向销401沿所述导向槽305进行移动;进一步的,所述转盘302表面具有多个圆弧形的长孔304;每个所述长孔304与每片所述压缩板303的第二侧的滚轴402配合形成凸轮副机构,并使所述滚轴402在所述长孔304内光滑移动;当驱动所述转盘302时,所述转盘302通过凸轮副的作用驱动所述压缩板303,在所述导向槽305与所述长孔304的共同作用下,使多片所述压缩板303围绕的空间收窄,形成压缩空间效果;
54.进一步的,所述固定腔内固定所述电机204以及所述传动组件205;所述电机204由所述电池206驱动进行运转,从而作为所述传动组件205的动力输入部分;所述传动组件205
的动力输出部分连接所述压缩组件203的所述转盘302,使所述转盘302绕其中心轴进行旋转,驱动对多片所述压缩板303的转动,从整体上,实现多片所述压缩板303向所述转盘302的轴心的径向压缩,如附图5;其中,所述传动组件205可以使用包括皮带传动、齿轮传动的方式,将动力传递到所述转盘302,在此不作限制;
55.设定所述压缩组件203在扩张到最大位置时,所述转盘302的所处角度为ω
max
,当放入所述气囊101后,所述压缩组件203可以压缩所述气囊101直到最小位置时的角度为ω
min
,则整个压缩行程中,所述转盘302转过的最大行程角度为:ω0=ω
max-ω
min
,并对应产生的最大气量为q
max
;在实际使用中,一般病人需要的潮气量q会小于最大气量q
max
,则实际的行程角度ω=kω0,其中k为行程系数,根据潮气量q进行计算;
56.进一步的,通过设定所述电机204在经过所述传动组件205的比例传动后,对所述转盘302的实现每周期t秒内转动ω;
57.在实际操作中,解除所述两个所述固定支架202,将所述压缩组件203扩张到最大位置,使所述手动呼吸器100穿过所述压缩组件203,并使所述压缩组件203位于所述气囊101中段位置;由医护人员根据病人需要设定需要输出的潮气量,则所述控制模块控制所述电机204的转向和转速,从而实现输出指定的潮气量q;进一步的,由医护人员设定所述压力安全阀105的泄压值,从而实现最大的输出气压。
58.实施例二:
59.本实施例应当理解为至少包含前述任意一个实施例的全部特征,并在其基础上进一步改进;
60.为实现所述手动呼吸器的稳定气压输出,以及增大所述手动呼吸器的可输出气量,本实施例中,设置多个所述压缩组件,如附图5;如本实施例中,包括三个所述压缩组件,按所述气囊101的长度方向依次排列,分别为第一压缩组件203a,第二压缩组件203b,第三压缩组件203c;三个所述压缩组件可以具有完全相同的结构和尺寸;或者,三个所述压缩组件具有相同的结构,但尺寸根据所述气囊101的不同部位作相应调整;
61.在其中一种传动组件的配置中,三个所述压缩组件的所述转盘都与所述传动组件205耦合,由所述电机204进行驱动从而运转;三个所述转盘通过齿轮连接与所述传动组件205中的一个齿轮轴啮合传动;所述齿轮轴上具有三段齿轮段:齿轮段b1、齿轮段b2、齿轮段b3,并且每段所述齿轮段与每个所述转盘的传动比例分别为i1、i2、i3,并且i1》i2》i3,通过设置不同的传动比例,使所述第三压缩组件203c最先完成压缩闭合,所述第一压缩组件203a最后完成压缩闭合,所述气囊101内的气流则以较为顺畅的顺序从所述进气口102流向所述出气口106;
62.在另一种传动组件的配置中,三个所述转盘通过两两之间的同步齿轮进行传动,所述传动组件205连接三个所述转盘中的其中一个,优选地,为所述第三压缩组件203c;并且所述第三压缩组件203c与所述第二压缩组件203b的传动为非连续传动,使所述第二压缩组件203b的行程角度ωb小于述第三压缩组件203c的行程角度ωc;类似地,使所述第一压缩组件203a的行程角度ωa《ωb,因此所述气囊101从所述第三压缩组件的位置开始,其压缩程度逐步递减,从而模拟人类手指按手指顺序按压所述气囊101的效果;
63.进一步的,通过实验室测定所述行程角度ω与呼吸系统可产生的潮气量q的关系,包括通过测定周期t的作用下,越快的完整压缩周期预示着可以提供越大的输出气压(在所
述压力安全阀的安全范围内),因此所述控制模块可以通过调整三个所述压缩组件的压缩顺序、压缩量等工作参数,进一步的细化所述呼吸系统的输出气体的参数。
64.实施例三:
65.为进一步实施对呼吸系统的潮气量以及输出,以及当病人具有自主呼吸能力时,能与病人的自主呼吸频率进行同步呼吸,因此在所述呼吸系统中包括所述监测模块,以及多个协同工作的所述传感器,如附图6;
66.在所述手动呼吸器100接入所述呼吸系统后,所述出气口106接入气管,并且连通与气管连接的呼吸口罩、面罩等器具;其中在与所述出气口106与所述气管之间,加装一个监测段;所述监测段安装有相关的气路参数的传感器,例如:气压计、流量计、流速计中的至少一个或全部;所述传感器通讯连接所述控制模块,用于监测包括病人当前的呼吸状态,以及所述呼吸系统当前的工作状态;
67.例如,包括安全预警相关的设置,当所述气囊101出现破裂或者气路中出现断开时,气路中出现高压时(例如病人失去知觉或呼吸意识时)、气管堵塞或扭动打结时,所述控制模块进入警报模式,并以气响、灯光等指定医护人员紧急进行呼吸系统的切换和排障;
68.另一方面,当病人的肺部无法提够足够的收缩肌肉张力,从则在所述呼吸系统在扩张周期中,所述气压计检测到的气压量低于自主呼吸时的最低气压量,则所述控制模块需要指示所述压缩模块的运动从而维持较高的出气压力;
69.优选地,包括一种辅助配合主动工作的呼吸模式;所述呼吸系统以预设的频率向病人输送常规呼吸气体,在两次由机械产生的呼吸之间允许病人进行自主呼吸,即指所述呼吸系统在每分钟内按预设的呼吸参数(呼吸频率、潮气量、呼吸比值等)给予病人通气,如若在触发窗内出现自主呼吸,便协助病人完成自主呼吸,如触发窗内病人无自主呼吸,则在触发窗结束时给予间歇的正压通气;通过与病人的自主呼吸同步,减少病人与所述呼吸系统的对抗,减低正压通气的血流动力学影响;
70.优选地,包括一种辅助通气方式,即在病人有自主呼吸的前提下,病人每次吸气时都能接受一定水平的压力支持,以辅助和增强病人的吸气深度和吸入气量。
71.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
72.虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
73.在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功
能和布置进行各种改变。
74.综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
